直升机分布式电动尾桨控制系统及控制方法
本发明涉及航空航天领域,特别提供了一种直升机分布式电动尾桨控制系统及控制方法。
背景技术:
1、传统直升机尾桨转速固定,尾桨具有变距铰,通过尾桨变距机构,改变桨距,可实现对尾桨推力大小的操控。然而,这种传统控制方式存在机械结构复杂,传动结构构件多,故障率高的缺点。
2、因此,提供一种新型的直升机分布式电动尾桨控制系统及控制方法,成为亟待解决的问题。
技术实现思路
1、鉴于此,本发明提供了一种直升机分布式电动尾桨控制系统及控制方法,以解决现有技术中存在的问题。
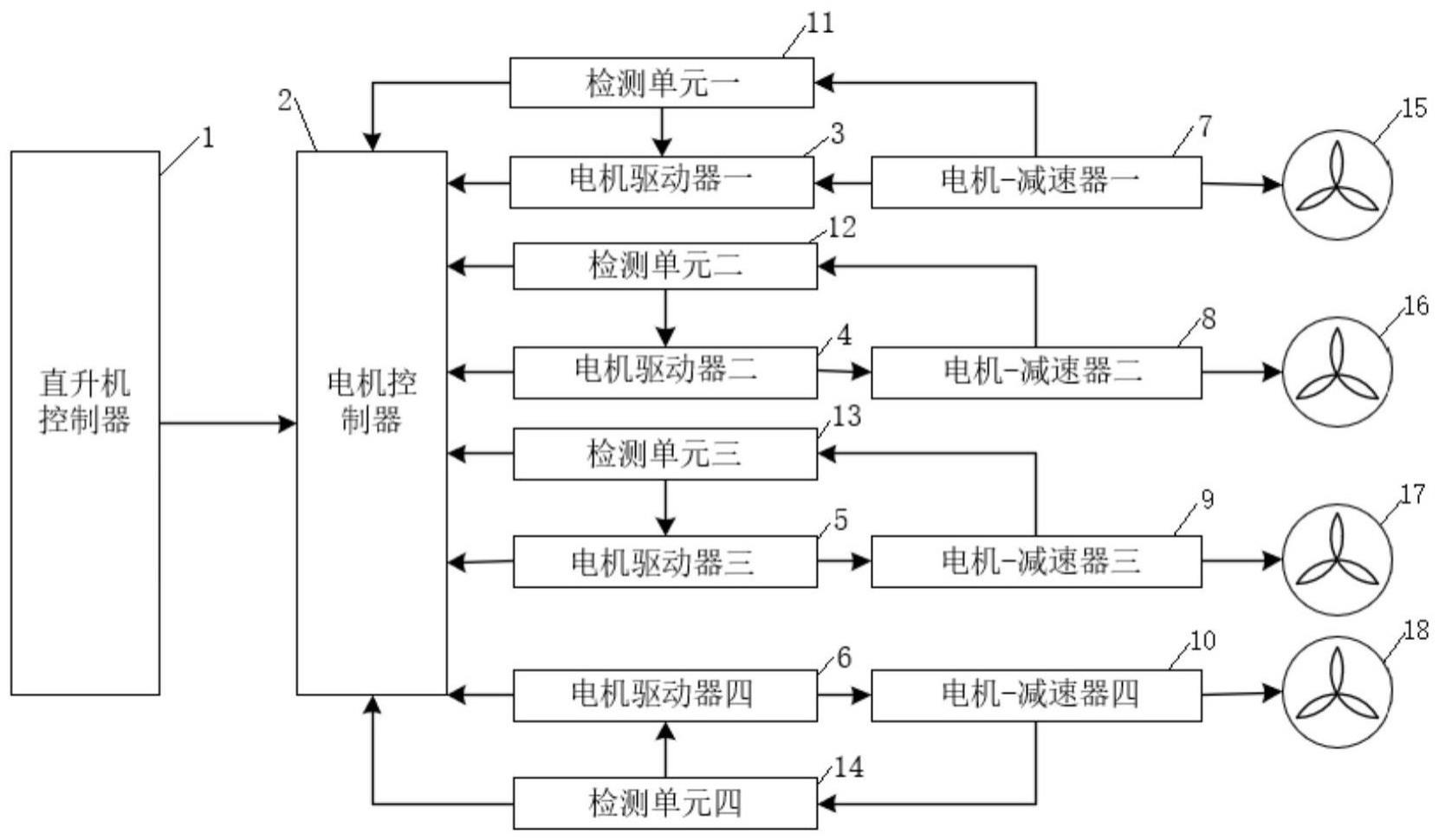
2、本发明一方面提供了一种直升机分布式电动尾桨控制系统,包括:尾桨、电机-减速器、电机驱动器、电机控制器和直升机控制器,其中,所述尾桨、电机-减速器、电机驱动器均为4个,所述直升机控制器通过所述电机控制器与4个电机驱动器连接,用于根据直升机的实际偏航角速率信息和直升机总控发送来的期望偏航角速率信息计算出角速率误差并发送至所述电机控制器,所述电机控制器用于根据所述角速率误差计算出所述电机-减速器需增加的电流并将计算结果发送至所述电机驱动器,所述电机驱动器与所述电机-减速器一一对应连接,用于根据所述电机控制器的计算结果调整所述电机-减速器的输入电流,4个尾桨分布安装于所述尾翼的侧面且与所述电机-减速机的输出轴一一对应连接,用于在所述电机-减速机的驱动下旋转。
3、优选,所述的直升机分布式电动尾桨控制系统还包括与所述电机-减速器一一对应的检测单元,所述检测单元用于检测电机-减速器的转速和/或电流和/或声音。
4、进一步优选,所述检测单元包括霍尔效应传感器和/或麦克风和/或光电编码器及a/d转换器,其中,所述霍尔效应传感器用于检测电机-减速器的电流的信息,所述麦克风用于检测所述电机-减速器的声音信息,所述光电编码器及a/d转换器用于检测电机的转速信息。
5、进一步优选,所述检测单元与所述电机控制器连接,用于将检测到的信息发送至所述电机控制器,所述电机控制器用于根据所述检测单元检测到的信息确定所述电机-减速器的输入电流,以保持直升机的平衡状态。
6、本发明还提供了一种直升机分布式电动尾桨控制方法,包括如下步骤:
7、s1:实时获取直升机的实际偏航角速率信息和期望偏航角速率信息;
8、s2:利用所述直升机的实际偏航角速率信息和期望偏航角速率信息计算出角速率误差δω;
9、s3:根据计算出的角速率误差计算用于驱动尾桨旋转的每个电机-减速器需增加的电流,其中,电机-减速器需增加的电流δi通过下式计算:
10、δi=k×d×δω (1)
11、式中,k为预设的比例系数,d为4*4的对角矩阵,表示为diag(a1,a2,a3,a4),其中,an=1或0,0表示第n个电机-减速器发生故障,1表示第n个电机-减速器未发生故障,n=(1,2,3,4),δω表示角速率误差;
12、s4:利用与所述电机-减速器连接的电机驱动器调整对应电机-减速器的输入电流,进而调整尾桨的转速,减小直升机偏航角速率误差,实现直升机飞行姿态的调整。
13、优选,所述的直升机分布式电动尾桨控制方法还包括实时检测电机-减速器的转速和/或电流和/或声音的步骤。
14、进一步优选,所述的直升机分布式电动尾桨控制方法还包括根据检测到的电机-减速器的转速和/或电流和/或声音信息确定所述电机-减速器的输入电流的步骤,其中,所述根据检测到的转速和/或电流和/或声音信息确定所述电机-减速器的输入电流的步骤具体如下:
15、根据检测到的转速和/或电流和/或声音信息判断所述电机-减速器的是否出现故障;若出现故障,停止故障电机-减速器,并利用下式计算新的比例系数k*:
16、k*=k×δk (2)
17、
18、式中,δk为非故障电机-减速器的比例系数变化量,δω表示角速率误差,n为非故障电机-减速器的个数,k为预设的比例系数;
19、将新的比例系数k*代入公式(4),得到新的电机-减速器需增加的电流δi*
20、δi*=k*×d×δω (4)
21、根据新的电机-减速器需增加的电流δi*逐步调整所述电机-减速器的电流。
22、本发明提供的直升机分布式电动尾桨控制系统中采用分布式尾桨,可实现固定桨距、变转速,通过对尾桨转速的调节,可实现对主旋翼反扭力更加精确的动态调节,具有更高的效率。分布式电动尾桨的控制通过独立控制不同的尾桨来实现旋翼平面内实现横向运动的控制,优化整个飞行系统的性能,实现更多自由度的控制。当一个尾桨故障时,仍然可以保持直升机的平衡和稳定性,提高了直升机的安全性。总的来说,分布式电动尾桨相对于传统电动直升机尾桨在控制方面能够更好地适应不同的飞行任务和要求。
23、本发明提供的直升机分布式电动尾桨控制方法,利用实际偏航角速率信息和期望偏航角速率信息可计算出角速率误差,根据角速率误差可计算出用于驱动尾桨旋转的每个电机-减速器需增加的电流,进而改变电机-减速器的转速及尾桨的转速,保证尾桨能够快速响应,从而提高直升机的效率和稳定性。该方法具有简单可靠、响应速度快等优点,可以有效提高直升机的飞行性能,具有广泛的应用前景。
技术特征:
1.一种直升机分布式电动尾桨控制系统,其特征在于,包括:尾桨、电机-减速器、电机驱动器、电机控制器和直升机控制器,其中,所述尾桨、电机-减速器、电机驱动器均为4个,所述直升机控制器通过所述电机控制器与4个电机驱动器连接,用于根据直升机的实际偏航角速率信息和直升机总控发送来的期望偏航角速率信息计算出角速率误差并发送至所述电机控制器,所述电机控制器用于根据所述角速率误差计算出所述电机-减速器需增加的电流并将计算结果发送至所述电机驱动器,所述电机驱动器与所述电机-减速器一一对应连接,用于根据所述电机控制器的计算结果调整所述电机-减速器的输入电流,4个尾桨分布安装于所述尾翼的侧面且与所述电机-减速机的输出轴一一对应连接,用于在所述电机-减速机的驱动下旋转。
2.按照权利要求1所述的直升机分布式电动尾桨控制系统,其特征在于:还包括与所述电机-减速器一一对应的检测单元,所述检测单元用于检测电机-减速器的转速和/或电流和/或声音。
3.按照权利要求2所述的直升机分布式电动尾桨控制系统,其特征在于:所述检测单元包括霍尔效应传感器和/或麦克风和/或光电编码器及a/d转换器,其中,所述霍尔效应传感器用于检测电机-减速器的电流的信息,所述麦克风用于检测所述电机-减速器的声音信息,所述光电编码器及a/d转换器用于检测电机的转速信息。
4.按照权利要求2所述的直升机分布式电动尾桨控制系统,其特征在于:所述检测单元与所述电机控制器连接,用于将检测到的信息发送至所述电机控制器,所述电机控制器用于根据所述检测单元检测到的信息确定所述电机-减速器的输入电流,以保持直升机的平衡状态。
5.一种直升机分布式电动尾桨控制方法,其特征在于,包括如下步骤:
6.按照权利要求5所述的直升机分布式电动尾桨控制方法,其特征在于:还包括实时检测电机-减速器的转速和/或电流和/或声音的步骤。
7.按照权利要求6所述的直升机分布式电动尾桨控制方法,其特征在于:还包括根据检测到的电机-减速器的转速和/或电流和/或声音信息确定所述电机-减速器的输入电流的步骤,其中,所述根据检测到的转速和/或电流和/或声音信息确定所述电机-减速器的输入电流的步骤具体如下:
技术总结
本发明公开了一种直升机分布式电动尾桨控制系统及控制方法,其中,控制系统包括:尾桨、电机‑减速器、电机驱动器、电机控制器和直升机控制器,直升机控制器利用实际偏航角速率信息和期望偏航角速率信息可计算出角速率误差,电机驱动器根据角速率误差可计算出用于驱动尾桨旋转的每个电机‑减速器需增加的电流,进而改变电机‑减速器的转速及尾桨的转速,保证尾桨能够快速响应,从而提高直升机的效率和稳定性。
技术研发人员:张庆新,裴蕾,王锋,纪云烽,杨康,周国庆
受保护的技术使用者:沈阳航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!