一种建筑复杂外立面用空中喷涂机器人的制作方法
本发明涉及建筑喷涂机器人领域,具体为一种建筑复杂外立面用空中喷涂机器人。
背景技术:
1、目前建筑物外墙面喷涂涂料多采用人工作业,劳动强度大,风险高,效率低,而且涂料雾滴对喷涂工人身体有害,长期从事外墙喷涂作业可能产生呼吸系统职业疾病。虽有半机械化辅助牵引和运载设备,但离不开人工喷涂作业。
2、近几年,随着无人机技术的突飞猛进,无人机在高空作业中已经广泛应用到工农业生产各个领域。比如,利用无人机喷洒农药和替代人工进行对人体有害的其他作业,正在逐步得到应用,但将空中机器人用于智能建筑领域在中国自主研发领域基本是一片空白。
3、因此,将空中机器人与建筑行业相结合,设计一款空中建筑喷涂机器人以解放建筑喷涂工人,对于降低工人劳动强度,提高喷涂质量和效率,是非常具有实际意义的一件事。
4、由于现有建筑注重外立面艺术美学,往往设计有复杂的形状结构使其具备应有的艺术特点,例如高层住宅建筑外立面具有多种外凸结构或悬空结构,外凸结构一般为结构层顶部的屋檐、空调机位等空中平台等部分,悬空结构大多为空中连廊部分。该种外凸和悬空结构部分无法采用空中机器人对其进行喷涂施工。
5、经检索:cn219580849u公开一种快速高空无人自动喷涂及验收装置,在说明书第23段指出:自动喷头通过连接延长管共形成三种样式,分别用于喷嘴的平行喷涂、向上喷涂、向下喷涂。与喷嘴对称方向设置配重保持装置重心平衡。自动喷头根据所需方向提前安装固定好,水平的各个方向可通过无人机机体的转向实现,向下及向上喷涂由延长管定向实现。该技术需要提前固定自动喷头才能完成向上喷涂作业,这样就导致需要重新将飞行设备落至地面重新调整喷嘴后在进行施工,适应性差且操作复杂,无法做到自适应调整喷嘴角度。
6、cn115772985a公开一种无人机喷涂装置,无人机喷涂装置包括喷涂机构及摇摆机构,喷涂机构包括料液筒、存气筒、充气泵和喷头,料液筒和存气筒连通,料液筒内盛装有料液,充气泵被配置为将储存于存气筒内的气体充入料液筒内,喷头通过软管与存气筒连通,摇摆机构包括摇杆、驱动件和连接杆,摇杆的一端与喷头固定连接,摇杆和喷头沿垂直于摇杆的轴线的方向间隔排列,连接杆的两端分别与驱动件的活动端和摇杆连接,驱动件被配置为驱动连接杆绕其与驱动件的活动端连接的一端转动。虽然采用喷涂时角度能够调整但角度调整范围有限无法完成向上喷涂。
技术实现思路
1、本发明所要解决的技术问题是:如何解决现有空中机器人无法自适应对建筑外墙外凸结构或悬空结构底部喷涂作业。
2、为了解决上述技术问题,发明人经过实践和总结得出本发明的技术方案,本发明采用了如下技术方案:
3、建筑复杂外立面用空中喷涂机器人,包括无人机本体,还包括:
4、安装基座,安装基座安装于无人机本体的底部;
5、喷涂机构,喷涂机构用于喷洒建筑涂料;
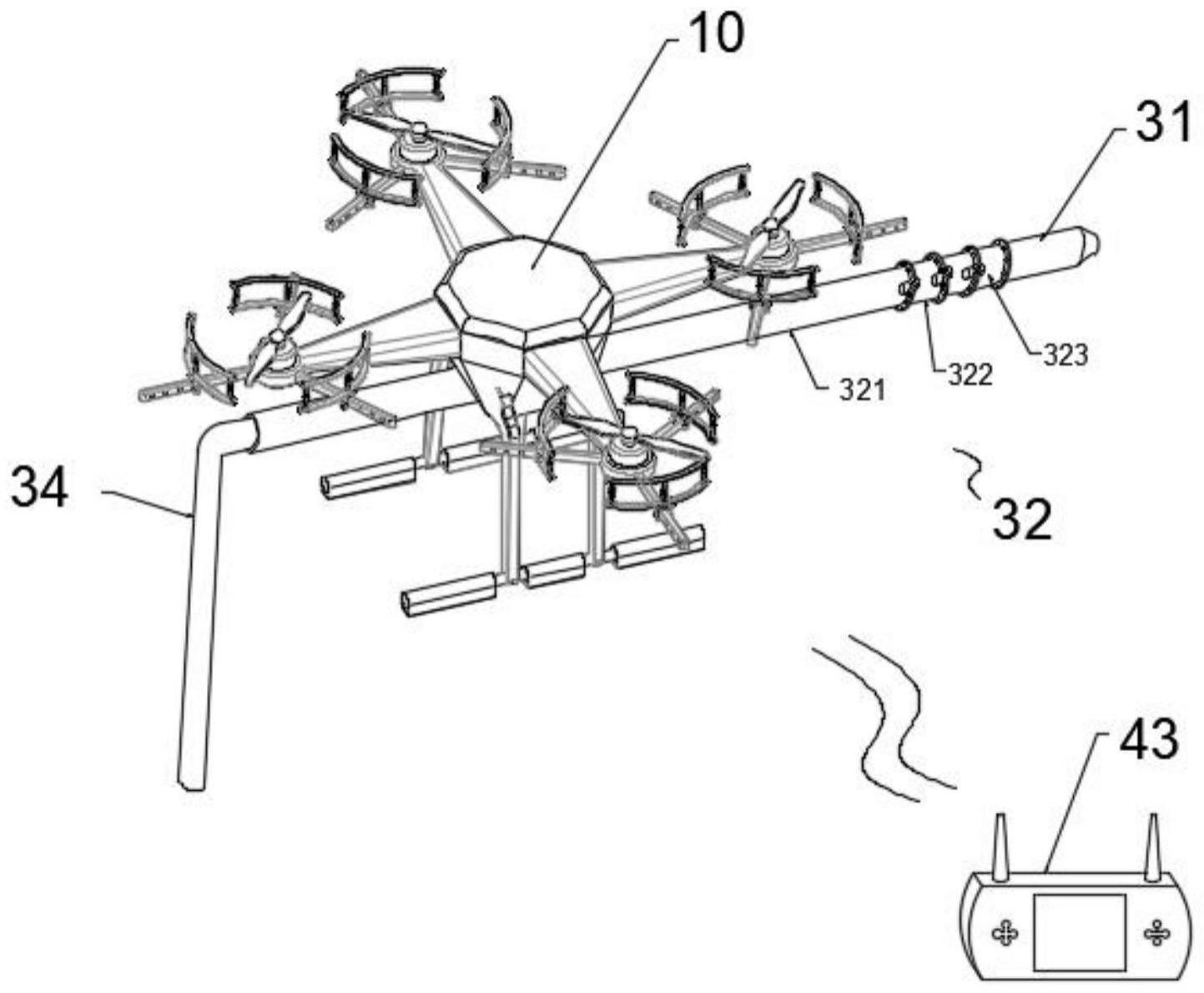
6、喷涂机构包括喷涂管、外部角度调节管和内部介质波纹管;
7、喷涂管安装于外部角度调节管的自由端,且喷涂管的自由端安装有雾化器;
8、外部角度调节管安装于安装基座上;
9、内部介质波纹管穿插于外部角度调节管内部且一端与喷涂管连通、另一端外接建筑涂料管;
10、外部角度调节管用于自动调整喷涂管和建筑外立面之间的角度。
11、进一步优选地方案,所述外部角度调节管包括首端固定管、中部角度调节管、末端连接管和角度调节件,中部角度调节管至少设置有一节,首端固定管安装于安装基座上,角度调节件适于调整中部角度调节管与首端固定管、末端连接管之间的夹角。
12、进一步优选地方案,所述角度调节件包括安装于首端固定管、中部角度调节管上的伺服电机一,中部角度调节管和末端连接管首端均安装有传动结构,且中部角度调节管和末端连接管的末端均为倾斜坡口结构布设。
13、进一步优选地方案,所述传动结构包括固定安装于伺服电机一输出端的传动齿轮,安装于中部角度调节管和末端连接管首端的齿圈,齿圈和传动齿轮适配啮合,齿圈上安装有t形沟槽,t形沟槽内活动安装有连接头,连接头适于固定安装于首端固定管和中部角度调节管的末端上。
14、进一步优选地方案,所述喷涂机构还包括角度传感器一和角度传感器二,角度传感器一安装于喷涂管上,角度传感器二安装于首端固定管上,角度传感器一和角度传感器二适于采集喷涂管的倾斜角度信号;
15、每节所述中部角度调节管上均安装有角度传感器三,角度传感器三适于采集中部角度调节管自身旋转的角度信号,角度传感器三的检测角度原点信号为首端固定管、中部角度调节管和末端连接管同轴时角度传感器三所处的位置点。
16、进一步优选地方案,所述安装基座包括固定安装于无人机本体底部的导轨和驱动电机,导轨上滑动配合有滑座,滑座适于安装喷涂机构,驱动电机的输出端安装有丝杠,丝杠上匹配安装有一滑块,滑块固定安装于滑座上,驱动电机适于经丝杠、滑块带动滑座沿导轨直线运动;
17、滑座上安装有激光测距单元和gps模块,激光测距单元适于采集与建筑外立面的直线距离的信号,gps模块适于采集以飞行起始点在三维坐标z轴方向上偏离标点位置的x轴和y轴值的信号。
18、进一步优选地方案,所述滑座上安装有自适应调节件,并通过自适应调节件安装有安装座,安装座适于安装喷涂机构。
19、进一步优选地方案,所述自适应调节件包括固定安装于滑座上的伺服电机二,安装于伺服电机二输出端的螺纹杆,螺纹杆上匹配有调节块,调节块适于相对滑座直线运动,调节块和安装座之间安装有调节杆,调节杆的两端均为万向节结构。
20、进一步优选地方案,所述机器人还包括控制模块,控制模块包括微处理器、喷涂控制模块、图像采集模块、无线操作模块、无人机本体飞行控制模块以及数据处理模块;
21、微处理器适于和无线操作模块通信连接,无线操作模块上设置有图像呈现单元,用于实时呈现图像采集模块经微处理器传输的采集图像;
22、无线操作模块上设置有操作控制单元,用于与微处理器信号连接,微处理器经接收的信号控制无人机本体飞行控制模块,无人机本体飞行控制模块内部设置有自适应飞行单元,自适应飞行单元和微处理器信号连接;
23、喷涂控制模块适于控制喷涂管喷洒建筑涂料,并与微处理器信号或线路连接;
24、图像采集模块适于采集以喷涂管喷涂中心点附近m范围内的图像信号;
25、数据处理模块适于接收激光测距单元采集的距离信号和gps模块采集的偏离信号并反馈于微处理器输出信号控制伺服电机二调整激光测距单元与建筑外立面之间的距离和纠正以飞行起始点在三维坐标z轴方向上稳定飞行或控制电动伸缩杆和伺服电机四调整激光测距单元与建筑外立面之间的距离和纠正以飞行起始点在三维坐标z轴方向上稳定飞行;
26、数据处理模块适于接收图像采集模块采集信号并给出喷涂管适应的喷涂角度,基于喷涂管喷涂角度计算给出每个伺服电机一最佳调整圈数或对应电动伸缩杆外伸量和伺服电机四最佳调整圈数并反馈于微处理器;
27、数据处理模块适于接收角度传感器一、角度传感器二或和角度传感器三采集的角度信号并反馈于微处理器,判断伺服电机一是否调整至设计圈数、对应电动伸缩杆是否调整至设计外伸量和伺服电机四是否调整至设计圈数,是否满足喷涂管喷涂角度要求。
28、进一步优选地方案,所述机器人还包括安装于地面上的激光测距装置,激光测距装置包括安装于地面上的架体,架体上安装有滑动布设的齿条和固定布设的伺服电机三,齿条上啮合有齿轮体一和齿轮体二,伺服电机三的主轴和齿轮体一连接,齿轮体二转动安装于架体上,且齿轮体二上固定安装激光发射器,无人机本体上安装有适于接收并识别激光发射器激光线束的标靶。
29、进一步优选地方案,所述无人机本体上还布设有防坠落机构,防坠落机构包括设置于无人机本体内部的备用电池、与备用电池电性连接的激光测距头、坠落检测组件、避险组件、控制模块;
30、备用电池适于在无人机本体出现坠落时对激光测距头、坠落检测组件和避险组件、控制模块应急供电;
31、激光测距头适于检测无人机本体在故障、失重或紧急坠落时检测无人机本体和障碍物之间的距离信号,且激光测距头斜向下布设;
32、坠落检测组件包括加速度传感器和倾角传感器适于采集无人机本体是否发生坠落的信号;
33、避险组件包括抛洒式降落伞以及防碰撞模块;
34、抛洒式降落伞适于在发生坠落时完成降落伞的自动抛洒;
35、防碰撞模块适于经激光测距头检测与无人机本体对应侧面的距离信号小于安全距离时由控制模块控制完成自动开启;
36、控制模块由备用电池供电;
37、坠落识别:
38、加速度传感器和倾角传感器采集加速度和倾角信号,由控制模块识别是否为无人机本体的坠落情况,若符合坠落的信号,抛洒式降落伞在第一时间完成抛洒对无人机本体进行减速和防螺旋坠落处理;
39、防碰撞识别:
40、激光测距头采集障碍物距离信号,并由控制模块识别是否在安全距离范围内,若小于安全距离范围,控制模块控制完成自动开启防碰撞模块。
41、进一步优选地方案,所述防碰撞模块包括安装于无人机本体对应侧面上的氦气气囊无人机本体内部的氦气发生器,氦气发生器和备用电池电性连接,氦气发生器和对应氦气气囊之间设置有与备用电池电性连接的电磁控制阀,多个侧部氦气气囊完全弹起后会全部包裹无人机本体的底部和侧部;
42、由氦气发生器和对应电磁控制阀向对应侧面的氦气气囊供气完成无人机本体和障碍物直接碰撞,氦气气囊由氦气发生器供气弹起时间为10~25ms;
43、当无人机本体即将落至地面时,即激光测距头检测的距离信号均小于安全距离时,所有的电磁控制阀均处于开启状态,所有的氦气气囊全部打开,完全包裹无人机本体的侧部和底部。
44、进一步优选地方案,所述雾化器的中部为喷涂口,雾化器的喷涂口四周设置有刚性保护气流层出口,且出口方向倾斜布设且倾斜方向一致,刚性保护气流层出口外配的高压气源安装于无人机本体上;
45、在喷涂时,高压气体经刚性保护气流层出口适于在喷涂口外围形成一个涡旋高压气流保护罩,且该保护罩具备一定的气流刚度,将保护罩内部的雾化喷涂料与保护罩外围气流罩分离隔开。
46、一种建筑复杂外立面喷涂方法,针对建筑建造期间的施工作业,喷涂步骤如下:
47、准备工作:
48、无人机本体单独飞行,经图像采集模块采集外立面结构信息,由数据处理模块计算处喷涂量和规划出飞行路线;
49、设备组装:
50、在无人机本体的底部安装安装基座,并经安装基座上安装喷涂机构,通将内部介质波纹管穿插于外部角度调节管内部并和喷涂管连通,另一端外接建筑涂料管,建筑涂料管外配的料罐位于地面或对应建筑层内,当位于建筑层内时经门窗引出;
51、在地面上安装激光测距装置,需要保证无人机本体的起始飞行点位和激光发射器的连线位于垂直于外立面的竖直平面内;
52、喷涂作业:
53、无人机本体竖直飞行,同时喷涂管上的雾化器开启对外立面喷涂处理,激光发射器发射激光线束,伺服电机启动,根据无人机本体的竖向飞行速度和时间适时经齿轮体一和齿轮体二调整激光发射器发射激光线束的角度,调整无人机本体上的标靶实时识别,当无人机本体偏离航线在标靶识别范围以外时,无人机本体上标靶接收不到激光线束,停止喷涂,同时无人机本体上的自适应飞行单元校正无人机本体重新处于喷涂消失点位置处,雾化器重新开启,继续喷涂;当无人机本体偏离航线在标靶识别范围以内时,持续喷涂,数据处理模块接收激光测距单元采集的距离信号和gps模块采集的偏离信号并反馈于微处理器输出信号控制伺服电机二调整激光测距单元与建筑外立面之间的距离和纠正以飞行起始点在三维坐标z轴方向上稳定飞行或控制电动伸缩杆和伺服电机四调整激光测距单元与建筑外立面之间的距离和纠正以飞行起始点在三维坐标z轴方向上稳定飞行;
54、在喷涂过程中由图像采集模块采集到外立面结构出现倾角或当飞行至外立面结构外凸结构点时,数据处理模块给出喷涂管适应的喷涂角度,基于喷涂管喷涂角度计算给出每个伺服电机一最佳调整圈数或对应电动伸缩杆外伸量和伺服电机四最佳调整圈数并反馈于微处理器;
55、数据处理模块接收角度传感器一、角度传感器二或和角度传感器三采集的角度信号并反馈于微处理器,判断伺服电机一是否调整至设计圈数、对应电动伸缩杆是否调整至设计外伸量和伺服电机四是否调整至设计圈数,是否满足喷涂管喷涂角度要求,进而适配外凸结构或倾角结构部分的喷涂;
56、当对外凸结构底部喷涂时,微处理器输出信号控制驱动电机调整适当设计圈数,在确保无人机本体处于安全喷涂距离状态下,对外凸结构底部完成喷涂;
57、喷涂过程中,高压气体经刚性保护气流层出口适于在喷涂口外围形成一个涡旋高压气流保护罩,且该保护罩具备一定的气流刚度,将保护罩内部的雾化喷涂料与保护罩外围气流罩分离隔开;
58、当喷涂至竖向路线端部由自适应飞行单元自适应转换路线,转换路线过程中,喷涂停止,同时横向定距离移动激光测距装置于对应下一竖向路线处,完成路线自适应切换。
59、一种建筑复杂外立面用空中喷涂机器人紧急避免方法,避险步骤如下:
60、当机器人出现故障导致失重等紧急停飞情况时:
61、加速度传感器和倾角传感器采集加速度和倾角信号,由控制模块识别是否为无人机本体的坠落情况,若符合坠落的信号,抛洒式降落伞在第一时间完成抛洒对无人机本体进行减速和防螺旋坠落处理;
62、在下落过程中,经激光测距头检测与无人机本体对应侧面的距离信号是否小于安全距离,如果小于安全距离时由控制模块控制由氦气发生器和对应电磁控制阀向对应侧面的氦气气囊供气,完成该侧氦气气囊和障碍物直接碰撞远离障碍物,氦气气囊由氦气发生器供气弹起时间为10~25ms;
63、当无人机本体即将落至地面时,即激光测距头检测的距离信号均小于安全距离时,所有的电磁控制阀均处于开启状态,所有的氦气气囊全部打开,完全包裹无人机本体的侧部和底部,直至无人机本体安全落地。
64、与现有技术相比本发明具备以下有益效果:
65、1)本发明可以用于建筑建造期间的外立面的全面施工作业,也可以适用于完成建筑后期外立面局部的修缮施工作业,实用性强且利于大面积推广实施作业。
66、2)本发明采用多节中部角度调节管适于调整首端固定管和末端连接管之间的夹角,该夹角即为喷涂管与无人机本体的夹角,通过调整该夹角来确保喷涂管的喷涂角度和高效且精准喷涂作业面,能够实现喷涂管的任意角度喷涂,尤其是外凸或悬吊结构的底部自适应角度喷涂,适于适应建筑复杂外立面作业施工。
67、3)本发明为精准控制喷涂角度,采用多组角度传感器配合伺服电机一使用,使得中部角度调节管和末端连接管精准的角度调整,进而确保喷涂管精准喷涂角度,基于精准喷涂角度是确保喷涂厚度均匀性的一个重要条件。
68、4)本发明为提高中部角度调节管和末端连接管调节过程中的结构稳定性和可靠性,增设有齿圈和位于齿圈上的t形沟槽,齿圈被伺服电机一驱动带动作出回转运动,进而调节其对应的管,配合其角度传感器使用,完成精准角度调控。
69、5)本发明为适应空中平台的喷涂,采用对喷涂机构的基座进行位置可调性布设,通过驱动电机经丝杠、滑块带动喷涂机构进行直线运动,进而使得雾化器远离或靠近外立面,进而适于满足大尺寸空中平台的喷涂作业,进而确保空中机器人的作业区域和可调范围,基于无人机需要气流完成飞行,如果太靠近建筑外立面易导致气流紊乱,导致无人机本体的失控,同时也增大与建筑外立面发生碰撞的风险,故此增设位置可调性的相应结构。
70、6)本发明为确保喷涂作业时的喷涂稳定性,在滑座上增设自适应调节件,经过伺服电机二带动螺纹杆将适时调整对应调节块的位置,使得安装座的位置得以短距离调整,安装座位置由位置传感器和激光测距器来实时采集其位置和距离信号,进而能够通过伺服电机二来带动螺纹杆将对应的调节块进行位置调整,且调节过程中喷涂管与建筑外墙立面的角度不会发生变化,确保喷涂质量;同时由于无人机在空中飞行是由于气流扰动,时常会出现小范围晃动,利用该自适应调节件能够主动进行位置修正,确保高质量喷涂,当机身出现小波度的抖动时,由于三组调节杆和端部万向节结构的存在,使得其安装基座对喷涂机构起到一个滤波的效果,避免其波动对喷涂管喷涂质量的影响。
71、7)本发明为确保连续适应性且精准、自动化喷涂,增设微处理器、喷涂控制模块、图像采集模块、无线操作模块以及数据处理模块,图像采集模块适于采集以喷涂管喷涂中心点附近3m范围内的图像信号的外形结构信号,便于微处理器作出针对性决策来调整喷涂管角度和安装座的位置,数据处理模块适于接收激光测距单元采集的距离信号和gps模块采集的偏离信号并反馈于微处理器输出信号控制伺服电机二调整安装座与建筑外立面之间的距离和纠正以飞行起始点在三维坐标z轴方向上稳定飞行,数据处理模块适于接收图像采集模块采集信号并给出喷涂管适应的喷涂角度,基于喷涂管喷涂角度计算给出每个伺服电机一最佳调整圈数并反馈于微处理器;数据处理模块适于接收角度传感器一、角度传感器二、角度传感器三采集的角度信号并反馈于微处理器,判断伺服电机一是否调整至设计圈数,是否满足喷涂管喷涂角度要求。
72、8)由于采用图像采集模块,无人机本体可以先行飞收集目标点位(喷涂区域)高度和面积信息,通过系统计算出喷涂点位的喷涂量,可以适于大面积墙体喷涂,也可以适应于小面积外墙表面的修补喷涂作业。
73、9)为确保无人机本体的稳定竖直上行,通过激光测距装置的伺服电机三带动激光发射器进行适应性角度旋转,该旋转角度根据无人机本体竖向飞行时间和飞行速度得到的飞行高度进行针对性的角度旋转,经过无人机本体上接收并识别激光线束的标靶,进而确保无人机本体的精准竖直飞行,当偏离竖向航线时,微处理器会控制喷涂控制模块关闭涂料喷洒,同时会调整无人机本体的飞行电机参数,确保无人机本体复位至停止喷涂点再启动喷涂控制模块继续喷洒,致使无人机本体沿飞行起始点在三维坐标z轴方向上稳定飞行。
74、10)为确保在无人机出现故障、失重或紧急情形,通过加速度传感器和倾角传感器采集加速度和倾角信号,由控制模块识别是否为无人机本体的坠落情况,若符合坠落的信号,抛洒式降落伞在第一时间完成抛洒对无人机本体进行减速和防螺旋坠落处理,完成坠落识别;再经激光测距头采集障碍物距离信号,并由控制模块识别是否在安全距离范围内,若小于安全距离范围,控制模块控制完成自动开启防碰撞模块,完成防碰撞识别,进而有效防护无人机本体。尤其时在释放降落伞缓慢坠落时,由于高空作业势必会存在不定向扰动的气流,通过对应侧面的氦气气囊在弹起后,由气囊直接和障碍物直接碰撞防护无人机本体。由于喷涂机器人在作业时与墙体之间的间距较小,在气流作用下,极易与墙体之间发生碰撞,通过防碰撞组件能够有效避免二者之间直接碰撞,同时还能在落至地面之前完成对无人机本体底部和侧部的包裹防护处理。
75、11)发明人经过现场实验时发现无人机机翼转速高功率大导致产生的气流会影响雾化的喷涂料,导致其喷涂料无法均匀喷涂于外墙上,对雾化器进行适应性改进,进而能够有效避免其喷涂料的均匀度和厚度的一致性。故此将雾化器的中部设置为喷涂口,雾化器的喷涂口四周设置有刚性保护气流层出口,且出口方向倾斜布设且倾斜方向一致,在喷涂时,可以启动刚性保护气流层出口外配的高压气源安装于无人机本体上,适于在喷涂口外围形成一个涡旋气流保护罩,且该保护罩的具备一定的气流刚度,将保护罩内部的雾化喷涂料能够与保护罩外围气流罩分离隔开,避免无人机本体机翼气流对喷涂料扰动对喷涂质量带来的不利影响。
- 还没有人留言评论。精彩留言会获得点赞!