一种基于磁力耦合调速的四旋翼垂直起降无人机
本发明涉及四旋翼无人机,尤其涉及一种基于磁力耦合调速的四旋翼垂直起降无人机。
背景技术:
1、无人机被称为“空中机器人”,无人机技术的持续进步,尤其是微电子,导航、控制、通信等技术,极大地推动了无人机系统的发展,促进了无人机系统在军事和民用领域的应用。
2、现在的无人机已广泛用于农业、林业、地质、海洋、气象、水文、军事、环保等领域,可实现航拍、探查等工作。虽然多旋翼无人机结构简单易于操控,有快速高效、地形广泛、机动灵活的优点,但是载重量小,续航时间较短,且骨架刚度较差、噪音大、齿轮传递功耗大,倘若在空中滞留时间过长,就可能导致无人机无法正常返航,无法保证较长时间的高空作业。
技术实现思路
1、本发明的目的在于解决现有技术中存在的技术问题,提供一种基于磁力耦合调速的四旋翼垂直起降无人机,以解决多旋翼无人机续航时间短、骨架刚度不足、齿轮传递功耗大的问题,克服了市场现有常规布局垂直起降无人机续航时间不长的固有缺陷,达到以更优化的平台延长了续航时间、提高了功率密度的应用目的。
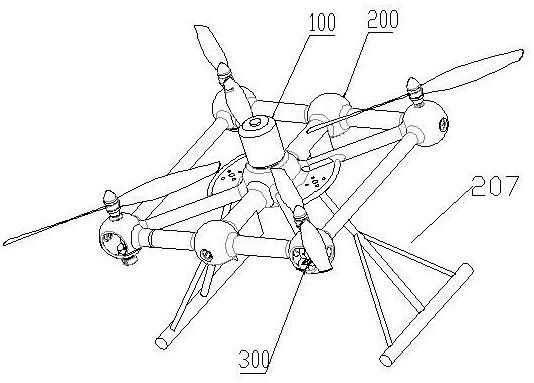
2、为实现上述目的,本发明提供的技术方案是:一种基于磁力耦合调速的四旋翼垂直起降无人机,包括机体、驱动组件、调速组件;
3、机体包括主体支架,主体支架包括主体框架、中心安装座和中横杆,主体框架与中横杆为中空的竹节式结构,中心安装座两侧通过中横杆与主体框架连接,主体框架两侧内腔设置有竖直传动杆,中横杆内腔设置有横传动杆,中心安装座两侧的中横杆底部分别设置有电压调节模块和飞行控制系统;
4、驱动组件包括主传动装置和副传动装置,主体框架四个角上设置有四角球壳,调速组件设置在四角球壳内;
5、四角球壳上设置有螺旋桨杆,螺旋桨杆上端穿出四角球壳设置有螺旋桨叶,螺旋桨杆下端位于四角球壳内处设置有磁力齿轮从齿轮;
6、调速组件包括电压调节模块、飞行控制系统、磁力齿轮主齿轮、磁力齿轮从齿轮和线圈,磁力齿轮主齿轮设置在竖直传动杆两端,线圈位于磁力齿轮主齿轮与磁力齿轮从齿轮之间的四角球壳的切口缝隙中,线圈上设置有沟槽,沟槽处缠绕有细小的绝缘导线,绝缘导线与电压调节模块连接。
7、优选的,主传动装置包括设置在中心安装座上的涡轴发动机,涡轴发动机上设置有涡轴,涡轴上设置有主动齿轮,横传动杆中心位置设置有副齿轮,副齿轮与主动齿轮啮合,副传动装置包括设置在横传动杆两端的传动主齿轮和设置在竖直传动杆中心位置处的传动副齿轮,传动主齿轮与传动副齿轮啮合。
8、优选的,中横杆与主体框架两侧、中心安装座两侧的连通处均设置有供横传动杆穿过的横轴法兰轴承,横轴法兰轴承与中横杆的管壁内腔过盈配合,且横传动杆与横轴法兰轴承连接处设置有横轴卡箍,主体框架两侧中心位置的内腔过盈配合有竖轴法兰轴承,竖直传动杆与竖轴法兰轴承连接处设置有竖轴卡箍。
9、优选的,四角球壳内上、下侧均设置有供螺旋桨杆穿过的球壳通孔,球壳通孔内过盈配合有桨杆法兰轴承,螺旋桨杆下端穿过桨杆法兰轴承伸出四角球壳,且螺旋桨杆伸出部分设置有桨杆卡箍。
10、优选的,电压调节模块包括输入电路、整流器、电容器、控制芯片、调压器、输出滤波器、保护电路装置、电池和连接器,电池通过连接器连接到输入电路,整流器通过导线连接电容器;电容器通过导线与控制芯片连接;控制芯片通过导线与调压器连接,调压器输出端通过导线与输出滤波器连接。
11、优选的,飞行控制系统包括控制器、接收机、和黑匣子,控制器与接收机一起被安放于黑匣子中,黑匣子与主体框架通过螺丝固定连接,控制器与接收机通过导线连接,控制器和接收机均通过导线与电压调节模块相连接。
12、优选的,中心安装座通过支撑杆与四角球壳连接,中心安装座上、下两侧设置有起落架安装板,起落架安装板 位于支撑杆之间,起落架安装板下方通过通孔固定有机体起落架,机体起落架包括机身连接杆和支撑架,机身连接杆与支撑架连接,支撑架两端还固定设置有加强杆,两端的加强杆与机身连接杆同一位置固定连接。
13、本发明有益效果:
14、(1)、本发明通过设置两个机体起落架,对该无人机的起飞以及降落进行支撑,保证了该无人机起飞以及降落的安全,且本发明的机体起落架与市面常见的t字形起落架不同,改进了起落架结构,大大增强了起落架的稳定性,从而降低了因无人机载重过大而导致无人机起落架断裂的概率。本发明中主体框架与中横杆为中空的竹节式结构,模仿了竹节的特征,且设计的结构较现有的的四旋翼无人机结构更加稳定,大大提高了无人机整体刚度,从而使无人机的载重能力增强,不易发生因载重过大而导致无人机机身断裂的情况。
15、(2)本发明通过安装一个涡轴发动机来提供无人机所需要的动力,其优势在于通过燃烧煤油和其他一些燃料,功率高,推力重量比大,驱动组件提供给无人机的动力很大,不仅大大提高无人机的载重能力,还提高了无人机的抗风性能,让无人机即使在一些更加恶劣的环境下也能正常飞行,这进而使四旋翼无人机的应用范围更加广泛,并且燃油携带能量多、具有较高的功率密度,能够在相对较小和轻便的尺寸下提供更多的动力,大大增加了无人机的续航时间,这也很好地改善了无人机续航时间较短的现状;且涡轴发动机可以适应多种类型的燃料,如汽油、柴油、天然气等,具有较高的燃料灵活性;且由于涡轴发动机的特殊设计,可以快速响应油门操作,提供即时的动力输出,达到快速响应的效果;且涡轴发动机具有较高的扭矩输出,可以在低转速下提供较大的动力,适用于一些需要快速启动和加速的场景。
16、(3)本发明调速组件中采用磁力齿轮主齿轮和磁力齿轮从齿轮,通过磁力传递动力,无需直接的机械接触,因此可以避免传统齿轮传动中的摩擦和磨损问题,延长齿轮的使用寿命;且磁力齿轮传动效率高,能够更有效地将动力传递,减小能量损失;且由于无接触,磁力齿轮传动可以减少噪音和振动,运行更加平稳和静音;且磁力齿轮传动不会受到灰尘、油污和水分的影响,具有良好的防尘防水性能,适用于恶劣的工作环境;且调速组件通过改变线圈产生的磁场强度,进而影响磁力齿轮主齿轮和磁力齿轮从齿轮之间的传动,进而达到改变螺旋桨叶转速的目的,从而达到实现调速的目的;且线圈产生的磁场强度对磁力齿轮主齿轮和磁力齿轮从齿轮的影响能够达到无人机所需的调速范围;且通过线圈的电流大小达到一定值之后,由线圈产生的磁场强度足够大,将对磁力齿轮主齿轮和磁力齿轮从齿轮有一个制动的效果,以此来应对一些突发状况,及时制动螺旋桨叶的转动。
17、综上所述,本发明中主体框架与中横杆为中空的竹节式结构,模仿了竹节的特征,且设计的结构较现有的的四旋翼无人机结构更加稳定,大大提高了无人机整体刚度;且磁力齿轮主齿轮、磁力齿轮从齿轮通过磁力传递动力,无需直接的机械接触,因此可以避免传统齿轮传动中的摩擦和磨损问题,延长齿轮的使用寿命;且使齿轮传递具有更高的传动精度,减少了维护和保养的工作,降低了运行成本,并且根据需要通过电压调节模块进行限制和调整,进而调节线圈的电流大小,改变线圈产生的磁场强度,进而影响磁力齿轮从齿轮的转动速度,实现调速。
- 还没有人留言评论。精彩留言会获得点赞!