一种用于星表固定的多足趾固定器的制作方法
本发明属于深空探测,尤其涉及一种用于星表固定的多足趾固定器。
背景技术:
1、随着空间探测技术的发展,对小行星开展探测成为一项新任务。小行星表面引力微弱,地质形貌特征复杂,介质特性多样,温度变化范围大,星表探测器着陆时及着陆后易反弹及飘走;因此,进行表面附着固定成为开展探测任务的重要前提。目前已有的粘附、胶粘、钻孔等固定方式均针对特定介质,对工作环境特性要求较高,或对探测器的资源需求苛刻,对星表特性适应能力较差,因此需要一种对星表特性适应能力较广的表面附着固定方案。
技术实现思路
1、本发明的技术解决问题:克服现有技术的不足,提供一种用于星表固定的多足趾固定器,可安装于空间机器人末端,通过单电机进行驱动,实现对多种不规则地形的行星表面的重复覆形附着固定。
2、为了解决上述技术问题,本发明公开了一种用于星表固定的多足趾固定器,包括:驱动模块、收放机构、张紧机构、固定执行动作模块、锁死机构和本体模块;
3、本体模块,用于作为驱动模块、收放机构、张紧机构、固定执行动作模块和锁死机构的安装本体,实现驱动模块、收放机构、张紧机构、固定执行动作模块和锁死机构的安装固定;
4、驱动模块,用于驱动收放机构和张紧机构动作;
5、收放机构,用于在驱动模块的驱动下,驱动固定执行动作模块执行展开或收拢动作;
6、张紧机构,用于在驱动模块的驱动下,驱动固定执行动作模块执行伸缩动作;
7、固定执行动作模块,用于在收放机构和张紧机构的驱动下,完成对星表的附着固定;
8、锁死机构,用于在固定执行动作模块完成对星表的附着固定后,进行刚化锁紧,保证多足趾固定器在固定状态下的稳定性。
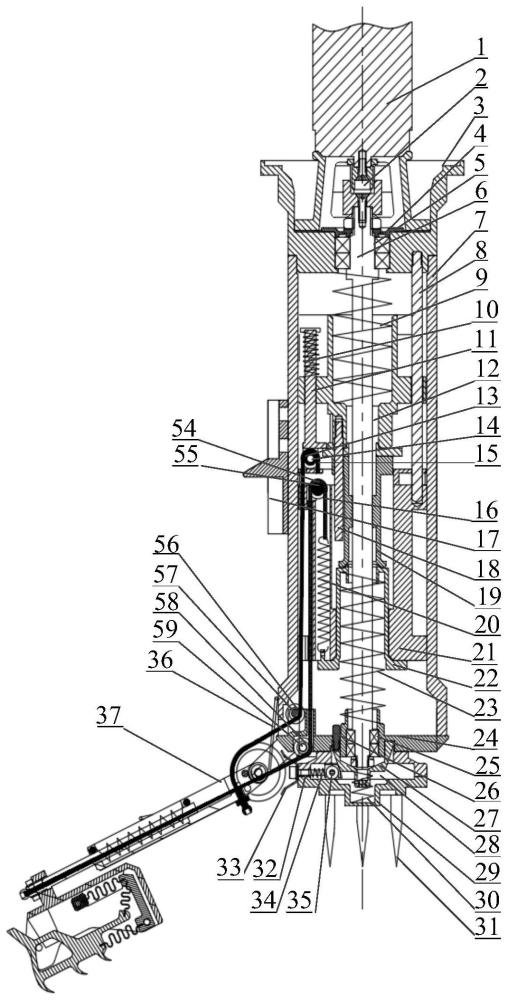
9、在上述用于星表固定的多足趾固定器中,本体模块,包括:轴承外壳、轴承压盖、壳体、卡块、中心支撑座、底座、滑轮c、滑轮轴c、滑轮d和滑轮轴d;
10、轴承外壳、卡块、中心支撑座和底座分别与壳体固连;其中,轴承外壳安装于壳体上部,卡块安装于壳体外侧壁,中心支撑座安装于壳体内腔中部,底座安装于壳体底部;
11、滑轮c通过滑轮轴c固定于底座中;滑轮d通过滑轮轴d固定于底座中。
12、在上述用于星表固定的多足趾固定器中,驱动模块,包括:电机、联轴器、一对角接触球轴承、丝杠、螺母、活塞a、恢复弹簧c、深沟球轴承、圆柱销、活塞b和恢复弹簧f;
13、一对角接触球轴承通过轴承压盖封装在轴承外壳内;
14、深沟球轴承安装在底座中;
15、丝杠通过上端的一对角接触球轴承和下端的深沟球轴承支撑运动;螺母套装在丝杠上与丝杠螺纹配合;
16、电机安装在壳体顶部,通过联轴器与丝杠连接;
17、活塞a安装在螺母下方,在恢复弹簧c的弹簧力和中心支撑座约束下进行位置保持;
18、活塞b上安装多个圆柱销,与底座保持同轴状态,并可沿底座中心位置的柱面导向上下滑动,在恢复弹簧f弹簧力作用下进行向上运动复位。
19、在上述用于星表固定的多足趾固定器中,收放机构,包括:收紧架导向杆、恢复弹簧e、恢复弹簧a、弹簧导向杆、收紧架、滑轮a、滑轮轴a、绳a和螺母导向杆;
20、收紧架导向杆为三个,三个收紧架导向杆均布在轴承外壳和中心支撑座之间,作为收放机构进行上下运动的导向;其中,各收紧架导向杆的一端与轴承外壳连接,另一端与中心支撑座连接;
21、收紧架安装在壳体内腔中正上方,可沿三根均布安装固定在中心支撑座上的收紧架导向杆上下移动;
22、螺母导向杆为三个,三个螺母导向杆均布固定在收紧架上;
23、恢复弹簧e安装在收紧架的中心处,上端与轴承外壳下端面接触,为收紧架向下运动保持与螺母贴合接触提供弹簧力;
24、滑轮a通过滑轮轴a安装在弹簧导向杆下端,为绳a提供传动变向;
25、绳a一端固定在中心支撑座上,另一端绕过滑轮a、滑轮c后固定在固定执行动作模块中的足趾组件上;
26、恢复弹簧a与弹簧导向杆同轴安装,为弹簧导向杆提供向上运动的动力,使绳a保持一定的张紧力,避免松弛钩挂干涉。
27、在上述用于星表固定的多足趾固定器中,张紧机构,包括:滑轮b、滑轮轴b、绳b和恢复弹簧b;
28、滑轮b为十二组,十二组滑轮b通过滑轮轴b均布安装在中心支撑座上端;
29、绳b一端与恢复弹簧b串联后与活塞a连接,另一端绕过滑轮b、滑轮c后与足趾组件中的足趾导杆连接。
30、在上述用于星表固定的多足趾固定器中,固定执行动作模块,包括:触地刺、扭簧和足趾组件;
31、足趾组件为十二个,扭簧为十二个;其中,各足趾组件分别通过相应的扭簧安装在底座外圆周上;
32、触地刺安装在锁死机构的压盖下端,在多足趾固定器初始下压接触星表时,在下压力下保持与星表的持续接触防止滑移,从而保障固定过程的稳定性。
33、在上述用于星表固定的多足趾固定器中,足趾组件,包括:绳轮、足趾转轴、限位销、调整螺丝、足趾套管、足趾导杆、恢复弹簧d、爪刺箱、回转片、固定片、爪刺片、销轴、柔性铰链a、柔性铰链b、柔性铰链c和限位轴;
34、足趾转轴穿过扭簧,将足趾组件安装在底座外圆周上;
35、绳轮通过两个限位销安装固定在足趾套管根部,与足趾转轴同轴连接;
36、调整螺丝安装在足趾套管上,与足趾套管为螺纹配合;调整螺丝为中空结构,轴线与绳轮的外圆周槽道相切;绳a绕绳轮外圆周槽道限位走线、穿过调整螺丝内孔固定在调整螺丝端部;其中,调整螺丝,用于通过对足趾套管拧紧状态的调整,实现对绳a的预紧;
37、足趾导杆安装于足趾套管内腔中,可在绳b拉力作用下沿足趾套管内腔限位面进行回缩滑动,并在恢复弹簧d的弹簧力作用下伸出滑动复位;
38、爪刺箱与足趾导杆端部固定连接;
39、柔性铰链a、柔性铰链b、柔性铰链c、回转片、固定片和爪刺片固定连接,共同组成一组完整的柔性片;其中,固定片通过柔性铰链a与回转片连接,回转片通过柔性铰链b和柔性铰链c与爪刺片连接;
40、多组柔性片通过两个个销轴共同固定在爪刺箱内腔中,通过爪刺箱内腔中的分隔片结构避免各柔性片相互运动干扰,通过固定在爪刺箱中的限位轴对各柔性片行程进行限位保护。
41、在上述用于星表固定的多足趾固定器中,锁死机构,包括:锁紧杆导向槽、压盖、锁紧杆、簧片、恢复弹簧g和滚轮;
42、恢复弹簧g套装在锁紧杆上;锁紧杆一端安装有簧片,另一端安装有滚轮;
43、锁紧杆安装在锁紧杆导向槽和压盖的腔体中。
44、在上述用于星表固定的多足趾固定器中,恢复弹簧a、弹簧导向杆、滑轮、滑轮轴、绳a、绳b、恢复弹簧b、锁紧杆、簧片、恢复弹簧g、滚轮和扭簧的数量均为十二,对应十二个足趾组件。
45、在上述用于星表固定的多足趾固定器中,多足趾固定器的工作过程如下:
46、电机正向转动,通过联轴器驱动丝杠转动,从而使螺母在丝杠上作直线向下运动;此时收放机构位于最上方,在恢复弹簧e的推力作用下随螺母共同向下运动,直至与中心支撑座接触限位运动停止,运动过程中绳a被释放,在扭簧作用下缓慢将足趾组件展开至与星表接触;
47、电机继续正向转动,螺母推动活塞a继续向下运动,直至活塞a和活塞b接触,运动过程中恢复弹簧b被拉伸,通过绳b将恢复弹簧b的力和位移传递给爪刺片,使爪刺片与运动路径中星表的微观凸起、沟壑或缝隙勾挂形成固定,爪刺片运动以横向位移为主,避免翻转产生脱附;
48、电机继续正向转动,螺母推动活塞a和活塞b共同向下运动,直到活塞b与压盖接触限位,运动过程中,与活塞b斜面接触的锁紧杆被沿径向挤出做直线运动,直至锁紧杆尾部的簧片逐步与足趾组件根部的绳轮抱死,使足趾组件在当前构型下锁死,完成固定构型刚化锁定。
49、本发明具有以下优点:
50、(1)本发明公开了一种用于星表固定的多足趾固定器,采用集成柔性片阵列的多足趾方式实现对行星表面附着固定,各足趾之间运动独立,各足趾中的柔性片运动也相对独立,柔性片阵列具备单独适应地形起伏的能力,提高了多足趾固定器对地形起伏的适应能力,解决了星表固定的难题。
51、(2)本发明公开了一种用于星表固定的多足趾固定器,通过触地刺勾挂行星表面缝隙或沟壑等凹凸不平处形成固定,通过多足趾共同作用提供锚固力,无需侵入星表岩石内部,具备星表地形的覆形适应能力。
52、(3)本发明公开了一种用于星表固定的多足趾固定器,采用单电机驱动,依次可实现足趾展开、张紧、构型锁死三个独立运动以及他们的逆动作,具有重复固定及释放功能,可重复使用。
- 还没有人留言评论。精彩留言会获得点赞!