垂直起降飞行器及控制方法与流程
本发明涉及飞行器,具体涉及一种垂直起降飞行器及控制方法。
背景技术:
1、垂直起降固定翼飞行器(分布推进式)既具备直升机的垂直起降能力,又具备固定翼的水平高效、高速飞行能力,并且相比直升机更加安静、舒适、经济,相比多旋翼更加高效、航程更长,相比固定翼可在城市内的起降平台垂直起降,是城市空中出行的极佳选择。然而现有垂直起降飞行器中,在尾翼上设置旋翼时,旋翼产生的气流与尾翼产生的气流相互干扰,容易造成俯仰控制困难,这将会给垂直起降飞行器的飞行控制带来不可预测的技术难度。
技术实现思路
1、鉴于以上现有技术的缺点,本发明提供一种垂直起降飞行器及控制方法,以改善现有垂直起降飞行器中尾翼上倾转旋翼与尾翼之间气流干扰较大,不容易进行俯仰控制的问题。
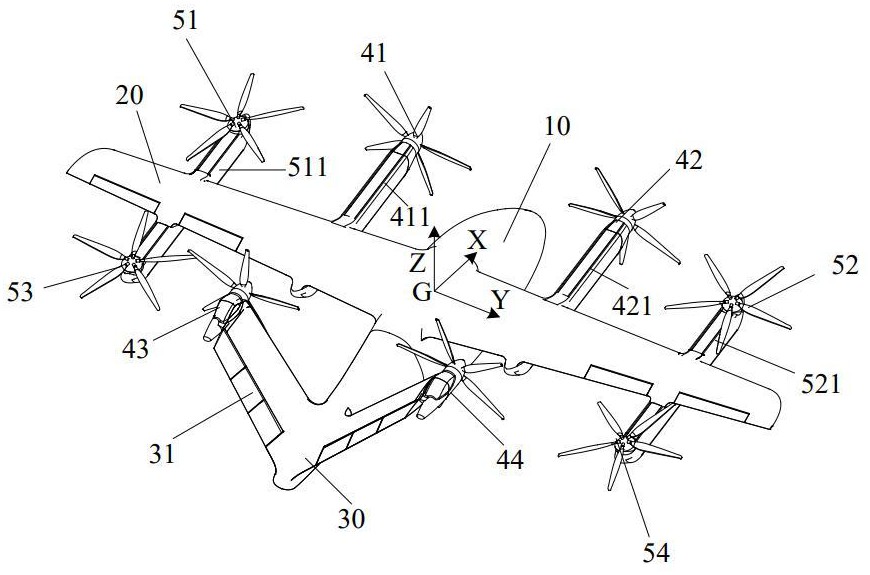
2、为实现上述目的及其它相关目的,本发明提供 一种垂直起降飞行器,该垂直起降飞行器包括:机身、2n个倾转旋翼和2n个固定旋翼。所述机身的两侧设置有机翼,所述机身的尾部设置有尾翼,所述尾翼上设置有升降方向舵;2n个倾转旋翼对称安装在所述机身的两侧,且2n个所述倾转旋翼中的一部分位于所述尾翼上,且至少位于所述尾翼上的所述倾转旋翼为全倾转旋翼;2n个固定旋翼对称安装在机身两侧的所述机翼上,并位于所述倾转旋翼的外侧;其中,n为大于或等于2的自然数,在垂直起降状态时,2n个所述固定旋翼在水平面上的投影关于a点呈中心对称,2n个所述倾转旋翼在水平面上的投影关于b点呈中心对称,且b点、a点和垂直起降飞行器的重心g点均位于所述机身的对称面内;在所述垂直起降飞行器由垂直起降状态向所述巡航状态过渡的过程中,g点和b点均沿所述对称面向靠近机头一侧移动,且g点位于a点靠近机头的一侧或与a点重合,b点始终位于a点靠近尾翼的一侧。
3、在本发明垂直起降飞行器一实施例中,所述垂直起降飞行器包括四个倾转旋翼和四个固定旋翼,设所述重心g点至a点的距离为l1, l1≥0,所述a点至b点的距离为l2, l2>0,四个所述固定旋翼沿机身的延伸方向的间距为l3、四个所述倾转旋翼沿机身的延伸方向的间距为l4,其中,0.1(l3+l4) ≥ 4l1+2l2≥ 0.01( l3+l4 )。
4、在本发明垂直起降飞行器一实施例中,所述尾翼为v型尾翼,所述v型尾翼上安装有两个所述倾转旋翼,两个所述倾转旋翼分别安装在所述v型尾翼的翼尖,在垂直起降状态时,沿平行于所述垂直起降飞行器滚转轴的方向,所述尾翼上倾转旋翼的旋转中心与所述v型尾翼的翼尖前缘的距离为t1,所述v型尾翼的翼尖的弦长为t2,其中,t1与t2的比值为15%~40%。
5、在本发明垂直起降飞行器一实施例中,以所述垂直起降飞行器的滚转轴为基准,定义为0°,以所述倾转旋翼向上倾转为正向,以向下倾转为负向,所述倾转旋翼的旋转轴线在-20°~110°范围内倾转。
6、在本发明垂直起降飞行器一实施例中,所述全倾转旋翼包括第一旋翼和动力吊舱,所述第一旋翼连接于所述动力吊舱,所述动力吊舱转动连接于所述尾翼,所述动力吊舱在所述第一旋翼的倾转过程中随所述第一旋翼同步倾转。
7、在本发明垂直起降飞行器一实施例中,所述第一旋翼的中心设置有整流罩,沿所述第一旋翼的旋转轴线延伸方向,所述整流罩的投影覆盖所述动力吊舱的投影。
8、在本发明垂直起降飞行器一实施例中,所述动力吊舱为回转体结构,所述回转体结构的回转轴与所述第一旋翼的旋转轴同轴设置;所述动力吊舱的表面呈流线型设置。
9、在本发明垂直起降飞行器一实施例中,所述第一旋翼包括螺旋桨和旋转驱动装置,所述螺旋桨安装于所述旋转驱动装置的输出轴上,所述动力吊舱包括吊舱壳体和位于吊舱壳体内的倾转机构,所述倾转机构用于驱动所述旋转驱动装置倾转,以带动螺旋桨倾转。
10、在本发明垂直起降飞行器一实施例中,所述倾转机构包括:
11、摇臂,转动安装于所述尾翼,所述摇臂与所述旋转驱动装置固定连接;
12、驱动臂,转动安装于所述尾翼,且转轴与所述摇臂的转轴平行设置;
13、倾转驱动装置,其座体安装于所述尾翼,其驱动端驱动所述驱动臂旋转;
14、连杆,所述连杆分别与所述驱动臂和所述摇臂转动连接。
15、在本发明垂直起降飞行器一实施例中,所述尾翼上固定设置有相互平行的第一轴体和第二轴体,所述摇臂转动安装于所述第一轴体,所述驱动臂转动安装于所述第二轴体,所述倾转驱动装置的座体安装于所述第一轴体上,所述倾转驱动装置的座体与倾转驱动装置的壳体固定连接;所述倾转驱动装置的驱动端与所述第二轴体同轴并与所述驱动臂固定。
16、在本发明垂直起降飞行器一实施例中,所述升降方向舵包括舵板和舵体驱动装置,所述舵板转动连接于所述尾翼或所述机身的尾部,所述舵体驱动装置驱动所述舵板转动以对所述垂直起降飞行器的方向进行调节。
17、在本发明垂直起降飞行器一实施例中,所述舵板的弦长与所述尾翼的弦长比值为15%~100%。
18、在本发明垂直起降飞行器一实施例中,以与所述尾翼平行时的初始位置为0°,以向上偏转为正向,向下偏转为负向,所述舵板的偏转角度为-90°~30°。
19、在本发明垂直起降飞行器一实施例中,2n个所述固定旋翼的旋转轴线与机身的对称面之间的夹角为-15°~+15°;
20、和/或,2n所述倾转旋翼在倾转过程中旋转轴线所形成的平面与机身的对称面之间的夹角α为-15°~+15°。
21、在本发明垂直起降飞行器一实施例中,所述尾翼为v型尾翼、y型尾翼、x型尾翼、t型尾翼、h型尾翼或u型尾翼中的任意一种,其中一部分所述倾转旋翼安装在尾翼上。
22、在本发明垂直起降飞行器一实施例中,所述机身两侧的所述机翼上均安装有机臂,2n个所述固定旋翼对称安装在机身两侧的所述机臂上,并分别位于所述机翼的前后两侧。
23、在本发明垂直起降飞行器一实施例中,采用以下方法进行俯仰控制:
24、在飞行的过程中,根据当前空速或动压分配升降方向舵与2n个所述倾转旋翼及2n个所述固定旋翼的俯仰控制比例;
25、根据所述俯仰控制比例,对所述升降方向舵、2n个所述倾转旋翼和2n个所述固定旋翼分别进行控制,以实现俯仰配平及操纵。
26、在本发明垂直起降飞行器一实施例中,根据所述俯仰控制比例,对2n个所述倾转旋翼进行控制包括:
27、通过尾翼上的所述倾转旋翼与其它任一所述倾转旋翼的倾转角度差,差动调节俯仰力矩以进行俯仰配平及操纵;
28、和/或,通过尾翼上的所述倾转旋翼与其它任一所述倾转旋翼的旋转速度差,差动调节俯仰力矩以进行俯仰配平及操纵;
29、和/或,通过尾翼上的所述倾转旋翼与其它任一所述倾转旋翼的倾转速度差,差动调节俯仰力矩以进行俯仰配平及操纵。
30、本发明还提供 一种上述任一垂直起降飞行器的控制方法,包括以下俯仰控制过程:
31、根据当前空速或动压分配升降方向舵与2n个所述倾转旋翼及2n个所述固定旋翼的俯仰控制比例;
32、根据所述俯仰控制比例,对所述升降方向舵、2n个所述倾转旋翼和2n个所述固定旋翼分别进行控制,以实现俯仰配平及操纵。
33、在本发明控制方法一实施例中,根据当前空速或动压分配升降方向舵与2n个所述倾转旋翼及2n个所述固定旋翼的俯仰控制比例之前还包括以下旋翼控制过程:
34、获取每一倾转旋翼的当前倾转位置;
35、若所述当前倾转位置与设定的巡航位不一致,则获取对应倾转旋翼在当前倾转位置下的当前空速或动压,并判断当前空速或动压是否等于或大于该当前倾转位置下的预设阈值;
36、若当前空速或动压等于或大于该当前倾转位置下的预设阈值,则控制倾转旋翼倾转至预设的下一位置;
37、逐步加大2n个倾转旋翼的转速,并逐步减小2n个固定旋翼的转速至设定转速。
38、在本发明控制方法一实施例中,在旋翼控制过程之前还包括以下起飞控制过程:
39、将2n个所述倾转旋翼倾转至旋转轴线竖直向上或倾斜向上;
40、将升降方向舵向下偏转;
41、启动2n个所述固定旋翼和2n个所述倾转旋翼,待垂直起降飞行器达到设定高度,发出平飞指令。
42、在本发明控制方法一实施例中,在所述俯仰控制过程之前还包括以下起飞过程:
43、将2n个所述倾转旋翼倾转至旋转轴线水平向前;
44、将升降方向舵向下偏转;
45、启动2n个所述固定旋翼和2n个所述倾转旋翼,待垂直起降飞行器达到设定高度,发出平飞指令。
46、在本发明控制方法一实施例中,所述旋翼控制过程中,在所述起飞控制过程之后,俯仰控制过程之前还包括以下旋翼控制过程:逐步加大2n个倾转旋翼的转速,并逐步减小2n个固定旋翼的转速至设定转速。
47、在本发明控制方法一实施例中,所述旋翼控制过程中,在逐步减小2n个固定旋翼的转速至设定转速之后,还包括控制所述升降方向舵根据当前空速或动压回零或作动至与当前空速/动压相匹配的配平舵偏值,并逐步参与到所述俯仰控制过程。
48、在本发明控制方法一实施例中,依次重复执行旋翼控制过程及俯仰控制过程,直至倾转旋翼倾转至巡航位,完成起飞转平飞。
49、本发明垂直起降飞行器,将2n个倾转旋翼设置在2n个固定旋翼的内侧,并在尾翼上设置升降方向舵和全倾转的倾转旋翼,一方面尾翼上倾转旋翼在倾转过程中动力吊舱随旋翼一起旋转,在悬停时动力吊舱浸润在对应旋翼中的遮挡面积较小,因此旋翼下洗流打到尾翼上的区域较少,能够减少一部分抬头力矩,能够改善垂直起降飞行器在复杂的干扰流场下俯仰力矩的控制,另一方面可以进一步通过固定旋翼、倾转旋翼及升降方向舵协调进行俯仰配平及操纵。
50、进一步地,本垂直起降飞行器布局,垂直起降飞行器重心和固定旋翼对称中心或倾转旋翼的对称中心不重合,且在所述垂直起降飞行器由垂直起降状态向巡航状态过渡的过程中,g点和b点均沿所述对称面向靠近机头一侧移动,且g点位于a点靠近机头的一侧或与a点重合,b点始终位于a点靠近所述尾翼的一侧,因此重心前侧倾转旋翼和固定旋翼所产生的牵拉力对重心g点的力矩较小,重心后侧倾转旋翼和固定旋翼所产生的牵拉力对重心g点的力矩较大,前后旋翼的力矩差可以抵抗尾翼上倾转旋翼洗流区对尾翼作用所产生的部分抬头力矩,因此可以降低俯仰操控的难度。因此,在重心g点前后两侧固定旋翼或倾转旋翼相同转速油门情况下,因为对重心g点的力臂长度差异,会产生低头力矩,可以通过低头力矩来抵消或部分抵消尾翼上倾转旋翼洗流区对尾翼作用所产生的抬头力矩,因此可以使垂直起降飞行器在前后旋翼油门一致的情况下就能较好的配平俯仰力矩。
51、进一步地,在倾转旋翼的倾转转换阶段,因为气动干扰的原因,垂直起降飞行器也会产生额外的较大的抬头力矩,并且在倾转旋翼的倾转过程中,垂直起降飞行器的重心随倾转过程逐渐往机头方向移动,而倾转旋翼的对称中心b点也逐渐往机头前移动,由于重心g点一直处于b点的前面,因此,整个倾转阶段重心g点前侧的倾转旋翼与重心g点后侧倾转旋翼的力矩差也能够产生一部分低头力矩从而抵消或部分抵消气动干扰造成的抬头力矩。
52、进一步地,在倾转阶段和巡航阶段,重心g点相对a点和b点靠近前侧,因此具有相对较大的纵向和航向静稳定裕度,飞机抵抗极端大风天气能力更强,飞行也更加安全。
53、进一步地,对于载人的垂直起降飞行器而言,所设置的载人座位多布置于前机身,因此乘客和行李重量比较靠前,所以本垂直起降飞行器布局模式对飞行器的配重极为友好,当乘坐不同人数乘客时,重心所允许的变化范围较广,这有利于飞机飞行安全。
54、本发明控制方法,根据当前空速或动压分配升降方向舵、2n个所述倾转旋翼及2n个所述固定旋翼的俯仰控制比例,并能够通过升降方向舵、2n个所述倾转旋翼及2n个所述固定旋翼联动实现俯仰控制。
- 还没有人留言评论。精彩留言会获得点赞!