一种接触式桥梁检测空中机器人、控制方法及相关设备与流程
本发明涉及桥梁检测空中机器人,具体而言,涉及一种接触式桥梁检测空中机器人、控制方法及相关设备。
背景技术:
1、桥梁检测是评估桥梁结构安全性、排除桥梁安全隐患、保障桥梁安全畅通、减少灾害事故发生的关键,其检测范围一般包括桥面、桥底和桥墩,但由于部分桥梁所处地形比较复杂,例如跨海大桥、山区桥梁等,导致对桥底和桥墩位置的检测带来了较大的难度。
2、对此,现有技术中提出利用空中机器人代替人工对桥梁进行检测的技术方案,然而大部分现有的无人机桥梁检测技术中,为避免接触碰撞导致空中机器人受损或失去控制,其空中机器人并没有搭载诸如回弹仪、超声非金属内部缺陷检测仪、裂纹观测仪等需要与桥体接触的检测设备,导致其仅停留在以非接触的方式对桥梁进行分析(例如观察桥梁、拍摄照片等),而这种方式往往只能够检测出桥梁的表面缺陷,无法检测出桥梁的内部缺陷,以致可实现的检测项目不全,局限性较大。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本发明的目的在于提供一种接触式桥梁检测空中机器人、控制方法及相关设备,能够搭载与桥体接触的检测设备并通过接触的方式对桥梁进行检测,同时有效避免接触碰撞导致空中机器人受损或失去控制,大大提高空中机器人在飞行和接触检测时的稳定性。
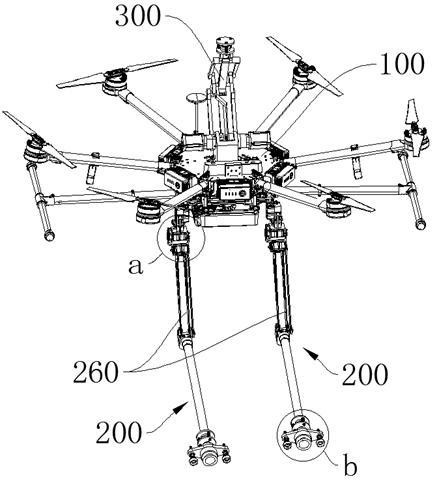
2、第一方面,本发明提供一种接触式桥梁检测空中机器人,包括飞行器和第一机械臂,所述第一机械臂设置在所述飞行器的底部且用于与桥梁接触以对桥梁进行检测;
3、所述第一机械臂包括弹性驱动关节,所述弹性驱动关节包括舵机、固定架、输入端支架和输出端支架,所述舵机固定安装在所述固定架上且与所述输入端支架连接,所述舵机用于驱动所述输入端支架旋转;
4、所述输出端支架转动连接在所述输入端支架上且与所述输入端支架之间设置有弹性组件,所述弹性组件用于在所述输出端支架相对所述输入端支架转动时为所述输出端支架提供复位弹力。
5、本发明提供的接触式桥梁检测空中机器人,通过在机械臂上设置弹性驱动关节以此赋予第一机械臂缓冲性能,从而在接触作业时空中机器人能够有效抵御外力冲击,达到平稳飞行和稳定接触的效果。
6、进一步的,所述弹性组件包括同轴设置的第一线性压缩弹簧和第二线性压缩弹簧;
7、所述输出端支架与所述输入端支架的转动连接处设置有沿所述转动连接处的径向方向凸出的固定部,所述固定部将所述输入端支架分隔为左腔和右腔;
8、所述第一线性压缩弹簧安装在所述左腔,所述第一线性压缩弹簧的其中一端与所述输入端支架连接且另一端与所述固定部连接;
9、所述第二线性压缩弹簧安装在所述右腔,所述第二线性压缩弹簧的其中一端与所述输入端支架连接且另一端与所述固定部连接。
10、既能够实现驱动器到负载的顺从性,还能够实现负载到驱动器的缓冲性能,保证结构强度的同时,具有结构紧凑和轻量化的特点。
11、进一步的,包括两个所述第一机械臂且还包括第二机械臂;
12、所述第一机械臂还包括摆臂,所述摆臂与所述输出端支架连接;
13、所述第二机械臂设置在所述飞行器的顶部且用于与桥梁接触以对桥梁进行检测。
14、配合两个第一机械臂使用能够大大增加空中机器人检测作业时的协同作业空间,实现了空中机器人顶部及前部的灵活接触式检测作业方式。
15、第二方面,本发明提供了一种控制方法,用于上述的接触式桥梁检测空中机器人,包括以下步骤:
16、s1.基于已建立的动力学模型,获取机械臂组运动到指定姿态时的总质心位置矢量;所述机械臂组包括两个所述第一机械臂;
17、s2.根据所述总质心位置矢量,计算出所述机械臂组对所述飞行器产生的重力矩;
18、s3.当所述机械臂组无外负载时,根据以下步骤s31-s32控制所述舵机:
19、s31.根据所述重力矩,计算出所述摆臂在弹簧组作用下产生的第一摆动角度;所述弹簧组包括所述第一线性压缩弹簧和所述第二线性压缩弹簧;
20、s32.以所述第一摆动角度作为补偿,控制所述舵机的扭矩;
21、s4.当所述机械臂组有外负载时,根据以下步骤s41-s43控制所述舵机:
22、s41.根据预设的期望接触力,计算所述机械臂组对所述飞行器产生的等效外力矩;
23、s42.根据所述重力矩和所述等效外力矩,计算出所述摆臂在弹簧组作用下产生的第二摆动角度;
24、s43.以所述第二摆动角度作为补偿,控制所述舵机的扭矩。
25、进一步的,步骤s31中的具体步骤包括:
26、s311.根据以下公式计算出所述第一摆动角度:
27、;
28、;
29、其中,为所述第一摆动角度,为所选取的所述弹簧组中单个线性压缩弹簧的刚度系数,为所述弹簧组中单个线性压缩弹簧靠近所述固定部的端面中心到摆臂中心的距离,为所述弹簧组中单个线性压缩弹簧的半径,为所述重力矩,为所述总质心位置矢量,为所述机械臂组的总质量,为重力加速度。
30、进一步的,步骤s41中的具体步骤包括:
31、s411.根据以下公式计算所述等效外力矩:
32、;
33、;
34、其中,为所述等效外力矩,为所述预设的期望接触力,为接触点在机械臂组局部坐标系下的相对位置,为所述机械臂组局部坐标系与弹性驱动关节局部坐标系的变换矩阵,为所述接触点在机械臂组局部坐标系下的x坐标,为所述接触点在机械臂组局部坐标系下的y坐标,为所述接触点在机械臂组局部坐标系下的z坐标。
35、进一步的,步骤s42中的具体步骤包括:
36、s421.根据以下公式计算所述第二摆动角度:
37、;
38、其中,为所述第二摆动角度。
39、第三方面,本发明提供了一种控制装置,用于上述的接触式桥梁检测空中机器人,包括:
40、第一获取模块,用于基于已建立的动力学模型,获取机械臂组运动到指定姿态时的总质心位置矢量;所述机械臂组包括两个所述第一机械臂;
41、计算模块,用于根据所述总质心位置矢量,计算出所述机械臂组对所述飞行器产生的重力矩;
42、第一控制模块,用于当所述机械臂组无外负载时,根据以下步骤s31-s32控制所述舵机:
43、s31.根据所述重力矩,计算出所述摆臂在弹簧组作用下产生的第一摆动角度;所述弹簧组包括所述第一线性压缩弹簧和所述第二线性压缩弹簧;
44、s32.以所述第一摆动角度作为补偿,控制所述舵机的扭矩;
45、第二控制模块,用于当所述机械臂组有外负载时,根据以下步骤s41-s43控制所述舵机:
46、s41.根据预设的期望接触力,计算所述机械臂组对所述飞行器产生的等效外力矩;
47、s42.根据所述重力矩和所述等效外力矩,计算出所述摆臂在弹簧组作用下产生的第二摆动角度;
48、s43.以所述第二摆动角度作为补偿,控制所述舵机的扭矩。
49、本发明提供的控制装置突破了传统非接触的检测方式,能够检测出桥梁的内部缺陷,有效扩大了检测项目,大大降低了使用时的局限性。
50、第四方面,本发明提供一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上述第一方面提供的所述控制方法中的步骤。
51、第五方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如上述第一方面提供的所述控制方法中的步骤。
52、由上可知,本发明提供的接触式桥梁检测空中机器人,通过两个第一机械臂搭载并操控与桥体接触的检测设备以接触的方式对桥梁进行检测,能够获得桥梁内部数据,实现更多项目的检测,有利于确保桥梁安全;同时第一机械臂还设置弹性驱动关节,弹性驱动关节赋予第一机械臂缓冲性能,极大地增加了第一机械臂的柔顺性,一方面有效避免接触作业时外力冲击导致空中机器人受损或失去控制,从而有利于提高空中机器人的稳定性和作业安全性;另一方面确保检测设备能够与桥体稳定接触,从而有利于获得准确的检测数据。
53、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!