一种多旋翼飞行吸附式爬壁机器人及控制方法
本发明涉及飞行爬壁探伤装置,尤其涉及一种多旋翼飞行吸附式爬壁机器人及控制方法。
背景技术:
1、对于高楼大厦或者高空储罐需要定期检查和维护,以确保安全性和外观。主要有以下几种方法:
2、(1)外观检查:专业的建筑维护工人可以使用绳索技术,如工业攀爬或绳索下降,来直接接近高空玻璃,进行检查和维修,人工通过肉眼检查来确定是否存在明显的瑕疵,如裂纹、污渍、损伤或腐蚀,这种方法依靠操作人员的经验,具有较大的误差和风险,并且存在工人安全风险。
3、(2)使用无人机:无人机技术已经开始用于高空建筑物的检查,这些飞行器可以携带摄像机和其他传感器,可以在高空进行全面的视觉检查,提供高分辨率图像和视频,以供后续分析,但是普通无人机检测只能在特定情况下进行,难以适应多种工作环境和任务需求。
4、(3)声波和热成像技术:一些地方采用声波或热成像技术,以检测隐形的玻璃缺陷,这些技术可以识别裂缝、冷凝等其他肉眼不可见的问题,但是将设备带到高空存在一些技术难题和风险。
5、这些传统的检测技术均存在一些明显的缺点,包括人力资源成本高、安全风险大、时间消耗长、覆盖范围有限等。为了提高检测效率和准确性,我们考虑采用飞行爬壁机器人代替人工完成将传感器运送到相应位置并进行检测的任务。
6、现有的飞行爬壁机器人(如申请号为201911117754.4中公开的一种多旋翼增压式飞行爬壁机器人)可以在地面行走、竖直墙面爬壁、天花板面爬壁及空中悬浮状态之间灵活切换,使机器人能够适应不同的工作环境和任务需求,功能性更强,由于机器人移动或者转向功能的实现,是通过控制器单独控制减速电机或者转向电机动作,以驱动爬壁轮行走或者转向而完成的,并不能直接通过多个旋翼的转动实现爬壁轮的行走或者转向,额外设置减速电机或者转向电机,不仅会导致生产成本的增加,也会导致整个机器人重量的增加,降低了机器人的便携性。
技术实现思路
1、本发明的目的在于克服上述技术不足,提出一种多旋翼飞行吸附式爬壁机器人及控制方法,解决现有技术中由于不能直接通过多个旋翼的转动驱动爬壁轮的行走或者转向而完成机器人的移动或者转向,而是通过额外设置的减速电机或者转向电机的动作,以驱动爬壁轮行走或者转向,会导致生产成本的增加,也会导致整个机器人重量增加的技术问题。
2、为达到上述技术目的,本发明的技术方案提供一种多旋翼飞行吸附式爬壁机器人,包括:
3、框架;
4、若干个爬壁轮,分别设置于所述框架的各个外凸角处;
5、两个飞行器,分别设置于所述框架的上表面和侧面,并相互垂直,上方的所述飞行器用以提供竖向升力,侧方的所述飞行器用以提供横向推力,所述飞行器包括四个呈矩形结构分布的旋翼;
6、控制器,用于调控各个所述旋翼的启闭、转向及转速。
7、进一步的,所述多旋翼飞行吸附式爬壁机器人,还包括检测单元,所述检测单元设置于所述框架上,用以执行检测任务。
8、进一步的,所述检测单元为摄像头或者传感器。
9、进一步的,所述框架为矩形结构。
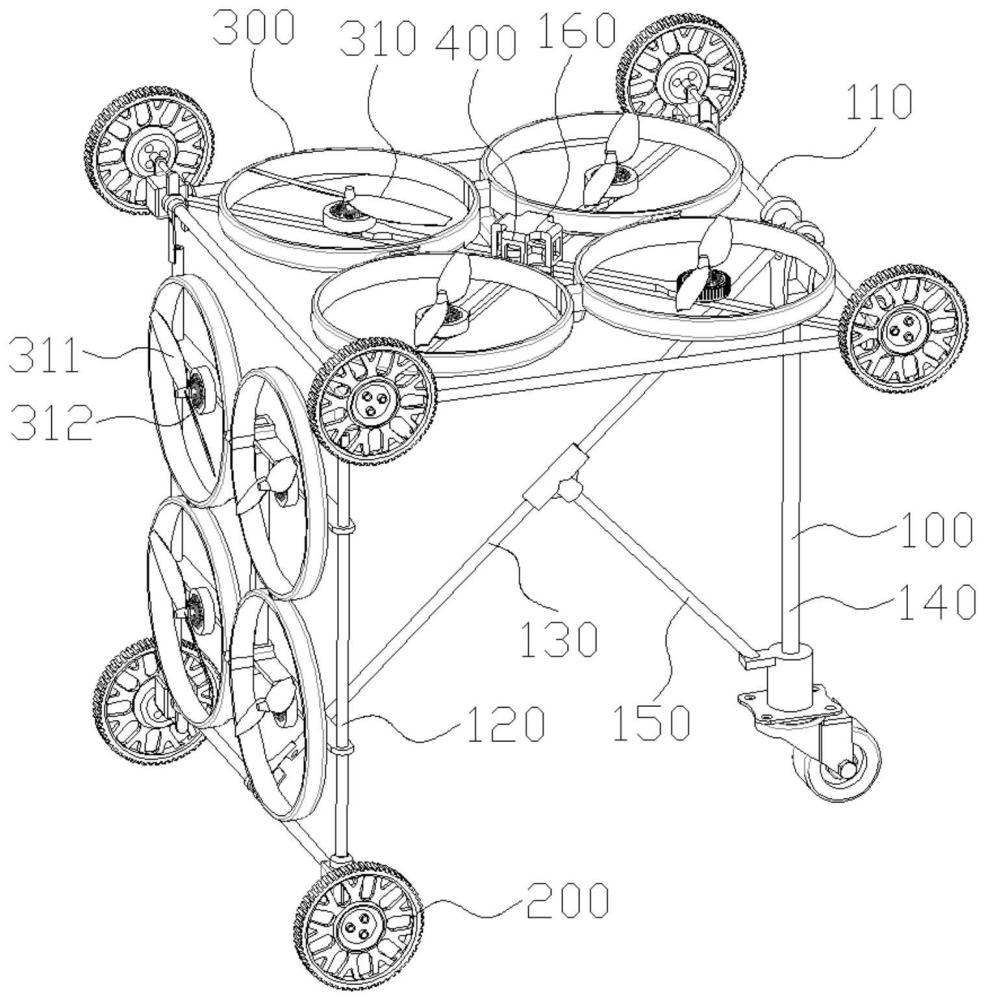
10、进一步的,所述框架包括水平支架、竖直支架、加强杆、安装杆、连接杆及装载仓,所述竖直支架和所述水平支架相互垂直,所述竖直支架的一侧与所述水平支架的一侧固定连接,所述加强杆的两端分别与所述水平支架的另一侧和所述竖直支架的另一侧固定连接,所述安装杆竖直设置,所述安装杆的上端与所述水平支架的另一侧固定连接,所述连接杆的两端分别与所述加强杆的中部位置处和所述安装杆的下端固定连接,所述装载仓固定于所述水平支架上,各个所述爬壁轮分别固定于所述水平支架的外凸角处、所述竖直支架的外凸角处及所述安装杆的底部,两个所述飞行器分别设置于所述水平支架和所述竖直支架上,所述检测单元可拆卸设置于所述装载仓内。
11、进一步的,所述装载仓位于上方的四个所述旋翼的中心位置处。
12、进一步的,所述旋翼包括螺旋桨及转动驱动件,所述转动驱动件固定于所述框架上,所述转动驱动件的输出端与所述螺旋桨固定连接,用于驱动所述螺旋桨转动,所述控制器与各个所述转动驱动件均电性连接,用于调控各个所述转动驱动件的启闭、转向及转速。
13、进一步的,所述转动驱动件为电机。
14、进一步的,所述爬壁轮为万向轮。
15、本发明还提供了一种多旋翼飞行吸附式爬壁机器人控制方法,适用于所述多旋翼飞行吸附式爬壁机器人,包括如下步骤:
16、当机器人处于地面行走状态时,上方的四个所述旋翼关闭,侧方的四个所述旋翼开启,以使机器人前进,调控侧方的四个所述旋翼的转向和转速,以使机器人左转或者右转;
17、当机器人处于爬壁状态时,上方的四个所述旋翼开启,以使机器人上升,调控上方的四个所述旋翼的转向和转速,以使机器人左转或者右转,侧方的四个所述旋翼开启,以使机器人紧贴墙壁;
18、当机器人处于天花板悬浮状态时,上方的四个所述旋翼开启,以使机器人紧贴天花板,侧方的四个所述旋翼开启,以使机器人前进,调控侧方的四个所述旋翼的转向和转速,以使机器人左转或者右转;
19、当机器人处于空中悬浮状态时,上方的四个所述旋翼开启,以使机器人悬停,调控上方的四个所述旋翼的转向和转速,以使机器人前进、后退、左转或者右转,侧方的四个所述旋翼关闭。
20、与现有技术相比,本发明的有益效果包括:使用两个四旋翼飞行器相互配合的设计,使得机器人可以在地面行走、竖直墙面爬壁、天花板面爬壁及空中悬浮状态之间灵活切换,使得机器人能够适应不同的工作环境和任务需求,功能性更强,并且可以直接通过调控上方的四个旋翼的转向和转速或者侧方的四个旋翼的转向和转速实现爬壁轮的行走或者转向以完成机器人的移动或者转向,不再需要额外的设置减速电机或者转向电机以驱动爬壁轮行走或者转向,不仅可以降低生产成本,也可以降低整个机器人重量,提高了机器人的便携性。
技术特征:
1.一种多旋翼飞行吸附式爬壁机器人,其特征在于,包括:
2.根据权利要求1所述的多旋翼飞行吸附式爬壁机器人,其特征在于,还包括检测单元,所述检测单元设置于所述框架上,用以执行检测任务。
3.根据权利要求2所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述检测单元为摄像头或者传感器。
4.根据权利要求3所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述框架为矩形结构。
5.根据权利要求4所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述框架包括水平支架、竖直支架、加强杆、安装杆、连接杆及装载仓,所述竖直支架和所述水平支架相互垂直,所述竖直支架的一侧与所述水平支架的一侧固定连接,所述加强杆的两端分别与所述水平支架的另一侧和所述竖直支架的另一侧固定连接,所述安装杆竖直设置,所述安装杆的上端与所述水平支架的另一侧固定连接,所述连接杆的两端分别与所述加强杆的中部位置处和所述安装杆的下端固定连接,所述装载仓固定于所述水平支架上,各个所述爬壁轮分别固定于所述水平支架的外凸角处、所述竖直支架的外凸角处及所述安装杆的底部,两个所述飞行器分别设置于所述水平支架和所述竖直支架上,所述检测单元可拆卸设置于所述装载仓内。
6.根据权利要求5所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述装载仓位于上方的四个所述旋翼的中心位置处。
7.根据权利要求5所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述旋翼包括螺旋桨及转动驱动件,所述转动驱动件固定于所述框架上,所述转动驱动件的输出端与所述螺旋桨固定连接,用于驱动所述螺旋桨转动,所述控制器与各个所述转动驱动件均电性连接,用于调控各个所述转动驱动件的启闭、转向及转速。
8.根据权利要求7所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述转动驱动件为电机。
9.根据权利要求1所述的多旋翼飞行吸附式爬壁机器人,其特征在于,所述爬壁轮为万向轮。
10.一种多旋翼飞行吸附式爬壁机器人控制方法,适用于如权利要求1-9中任意一项所述的多旋翼飞行吸附式爬壁机器人,其特征在于,包括如下步骤:
技术总结
本发明公开了一种多旋翼飞行吸附式爬壁机器人及控制方法,其包括框架、若干个爬壁轮、两个飞行器及控制器,各个所述爬壁轮分别设置于所述框架的各个外凸角处;两个所述飞行器分别设置于所述框架的上表面和侧面,并相互垂直,上方的所述飞行器用以提供竖向升力。本发明的有益效果是:实现了机器人在不同环境下灵活切换多种姿态的能力,并且可以直接通过调控上方的四个旋翼的转向和转速或者侧方的四个旋翼的转向和转速实现爬壁轮的行走或者转向以完成机器人的移动或者转向,不再需要额外的设置减速电机或者转向电机以驱动爬壁轮行走或者转向,不仅可以降低生产成本,也可以降低整个机器人重量,提高了机器人的便携性。
技术研发人员:陈昊,王艺霖,马博博,谢强,徐琳,程卓,张晴,朱光洁,文照阳,李明轩,尹英杰,易帅,黄智豪,龚锐,苏笑省,骆乐,吴家豪,杨晨,刘洋博,陈林鑫
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!