一种长航时无人机及其气动优化方法与流程
本发明涉及无人机,特别是一种长航时无人机及其气动优化方法。
背景技术:
1、无人机就是无人驾驶飞机,简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人无人机,随着电子技术、材料的快速发展,无人机在通信中继、航空拍摄、资源勘探、军事等领域广泛应用。
2、无人机主要由机身、机翼、尾翼等结构部件组成,无人机机体结构是无人机的躯干和受力基础,不仅要固定和支持无人机的其他部件,将整架无人机连接成一个整体,还要承受各连接部件传来的载荷,承受载荷在机身内部的设备、任务载荷及本身重力和惯性。从而无人机通常体积大、重量重,导致无人机续航时间短。另外,无人机上任务载荷通常与无人机固定连接,导致无人机任务单一,要完成不同任务必须更换不同无人机,成本高。目前现有垂直起降无人机实际续航时间为60-90分钟,难以满足长距离电力线路巡检作业要求。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种长航时无人机及其气动优化方法,实现无人机续航时间的提升。
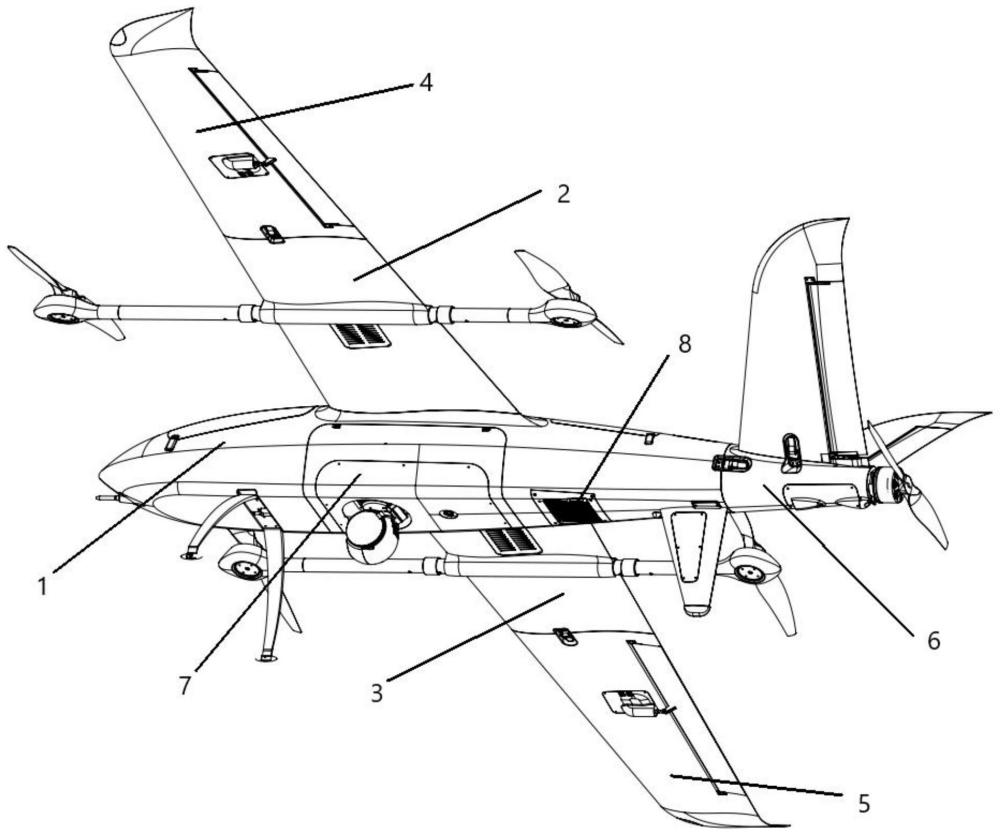
2、为实现上述目的,本发明采用如下技术方案:一种长航时无人机,包括:机身、左机翼中段、右机翼中段、左机翼尾段、右机翼尾段以及尾翼;
3、机身的两侧通过外伸碳管组件和第一锁扣分别连接所述左机翼中段以及右机翼中段;
4、机身通过第二锁扣和定位销与尾翼连接;
5、左机翼中段通过第一碳管和第三锁扣与左机翼尾段连接;右机翼中段通过第二碳管和第四锁扣与右机翼尾段连接;
6、所述机身的腹部设置有容纳腔,所述容纳腔用于安装载荷舱。
7、在一较佳的实施例中,所述容纳腔沿所述机身长度方向的两端分别设置有u型滑槽,所述载荷舱的顶部的两端分别设置有与u型滑槽配合的u型滑轨;所述u型滑槽的长度方向与所述u型滑轨的长度方向平行,所述u型滑槽与所述u型滑轨沿所述机身方向相互限位使得所述载荷舱与所述机身可拆卸地固定连接;相互适配的u型滑槽与u型滑轨之间的开口相对设置。
8、在一较佳的实施例中,外伸碳管组件包括设置在所述机身的两侧分别对称的向外延伸设置有第一外伸碳管、设置在所述机身的内部设置有第一内部碳管、设置在所述左机翼中段以及右机翼中段面向所述机身的一端分别向外延伸设置有第二外伸碳管、设置在所述左机翼中段以及右机翼中段面向所述机身的一端分别设置有第二内部碳管;所述第一外伸碳管插入所述第二内部碳管,所述第二外伸碳管插入所述第一内部碳管。
9、在一较佳的实施例中,所述第一锁扣、第二锁扣、第三锁扣及第四锁扣均包括:锁扣连接件以及与锁扣连接件配合的锁扣连接配合件,锁扣连接件设置在左机翼中段、右机翼中段、左机翼尾段、右机翼尾段以及尾翼上,锁扣连接配合件设置在所述机身、左机翼中段、右机翼中段。
10、在一较佳的实施例中,所述左机翼中段上设置的锁扣连接件及设置在右机翼中段上设置的锁扣连接件均设置在面向所述机身的一端,设置在所述机身上的分别与所述右机翼中段及所述左机翼中段的锁扣连接件配合的两个锁扣连接配合件设置在所述机身的两侧。
11、在一较佳的实施例中,限位圈、固定臂以及扭簧;所述固定臂与所述限位圈之间通过扭簧连接;所述扭簧的中部设置有转轴,所述转轴分别与左机翼中段、右机翼中段、左机翼尾段、右机翼尾段以及尾翼固定连接;所述锁扣连接配合件为限位钩;所述限位钩与限位圈限位配合。
12、在一较佳的实施例中,机身前段设置有电池舱,机身后段设置有航电舱,电池舱和航电舱分别用于安装电池和航电系统;机身的前端和后端分别设有用于安装天线的天线安装盖;机身下部前后设置有前脚架和后脚架,且后脚架内部埋有天线。
13、本发明还提供了一种长航时无人机的气动优化方法,采用上述一种长航无人机,包括以下步骤:
14、步骤s1:选定机型参数:在通用无人机选型库中选取一种机型,设定机翼面积s1、机翼展长b、机翼平均气动弦长ca、翼根弦长cr、翼尖弦长ct、机翼展弦比a;
15、步骤s2:利用雷诺平均n-s方程对上述长航时无人机的湍流进行流体力学仿真模拟;其中,雷诺平均n-s方程的获取方法为:
16、将瞬时n-s方程中的每个解释变量被分解为对应的平均值及其脉动分量φ':
17、
18、其中,φ表示速度分量、压力、能量、物质浓度中任一物理量;
19、将分解后的平均值及其脉动分量φ'插入瞬时n-s方程得到均值方程;其均值方程包括平均质量方程和动量传输方程;其中,
20、平均质量方程为:
21、
22、动量传输方程为:
23、
24、其中,表示外积,ρ为密度,和分别为平均速度和平均压力,i为恒等张量,t为粘性应力张量,fb为作用于连续体的单位体积的各种体积力的合力;附加项是一个雷诺应力张量trans,其定义如下:
25、
26、其中,v′x、v′y、v′z分别为无人机沿x、y、z轴上的速度脉动。
27、在一较佳的实施例中,通过湍流涡粘性系数将雷诺应力张量trans作为平均流量的函数进行建模:
28、
29、
30、其中,s为平均应变率张量;
31、湍流涡粘性系数μt的计算公式如下所示:
32、
33、其中,μ为流体动力粘度,k为湍流脉动动能,cμ=0.09为常数,fμ为阻尼函数,t为湍流时间尺度;
34、关于湍流脉动动能k和湍流耗动能散率ε的输运方程为:
35、
36、
37、其中,σk、σε、cε1、cε2为常数,f2为阻尼函数,pk、pε为产生条件,sk、sε为指定条件,ε0为抵消湍流衰减的环境湍流值;
38、s3:不同雷诺应力张量trans对应不同气动力学公式,根据本设计查询标准库,得到近似气动力系数公式,将仿真模拟后的机型参数代入气动力系数公式:
39、
40、式中:lgb为升力,vgb为自由流速度,s为参考面积,取机翼面积或机身最大横截面积;
41、
42、式中,dgb为阻力;
43、
44、式中,mgb为俯仰力矩;ca为机翼平均气动弦长;
45、根据公式(3-1)-(3-3)设定迎角为-5°—15°,得到升力系数cl、阻力系数cd、俯仰力矩系数cm范围。
46、计算升阻比根据式(3-1)-(3-3),得到最大升阻比,其对应最优迎角;升阻比≥20即认为无人机气动特性较好,适合长航时飞行作业。
47、与现有技术相比,本发明具有以下有益效果:
48、1.通过上述气动优化方法,可以精准计算无人机最优迎角,优化提升无人机续航时间。
49、2.无人机蒙皮主要采用高强度碳纤维复合材料,在天线安装特殊位置采用玻璃纤维复合材料,两种材料具备强度高,密度小等特点,满足飞机飞行前提下重量更轻。
50、3.无人机桁架采用碳纤维复合材料板和轻木夹心复合材料板,使整机在强度满足要求的情况下,重量更轻。
51、4.整机采用高度集成化航电系统,该系统体积小重量轻,占用空间小,能适用各尺寸类型飞机。
52、5.机身腹部中段设计成n形结构,用于载荷舱的安装,载荷舱可安装不同的载荷。通过更换载荷舱即可更换载荷舱,从而满足无人机不同的任务需求。
- 还没有人留言评论。精彩留言会获得点赞!