具有避让功能的石油管道巡线用无人机的制作方法
本技术属于石油巡线保护的,具体涉及具有避让功能的石油管道巡线用无人机。
背景技术:
1、石油管道是由油管及其附件所组成,并按照工艺流程的需要,配备相应的油泵机组,设计安装成一个完整的管道系统,用于完成油料接卸及输转任务;
2、目前,随着管道、线路等基础设施建设的广泛开展,对这些设施的维护也变得日益紧迫。传统的管道巡线一般采用人工巡线方式实现,人工巡线方式工作效率低,周期性长而巡线精度低、受外界因素影响大,难以满足自然气候限制、地貌复杂和恶劣环境下的管道巡线需求。为此,现有技术中有将无人机应用于管道巡线的尝试;
3、现有的无人机巡线过程无法在遇到障碍物时,迫使无人机做出快速避让动作,导致无人机与障碍物相撞,损坏无人机,该现象成为本领域人员亟待解决的问题。
技术实现思路
1、本实用新型的目的在于提供具有避让功能的石油管道巡线用无人机,以解决上述背景技术中提出的问题。
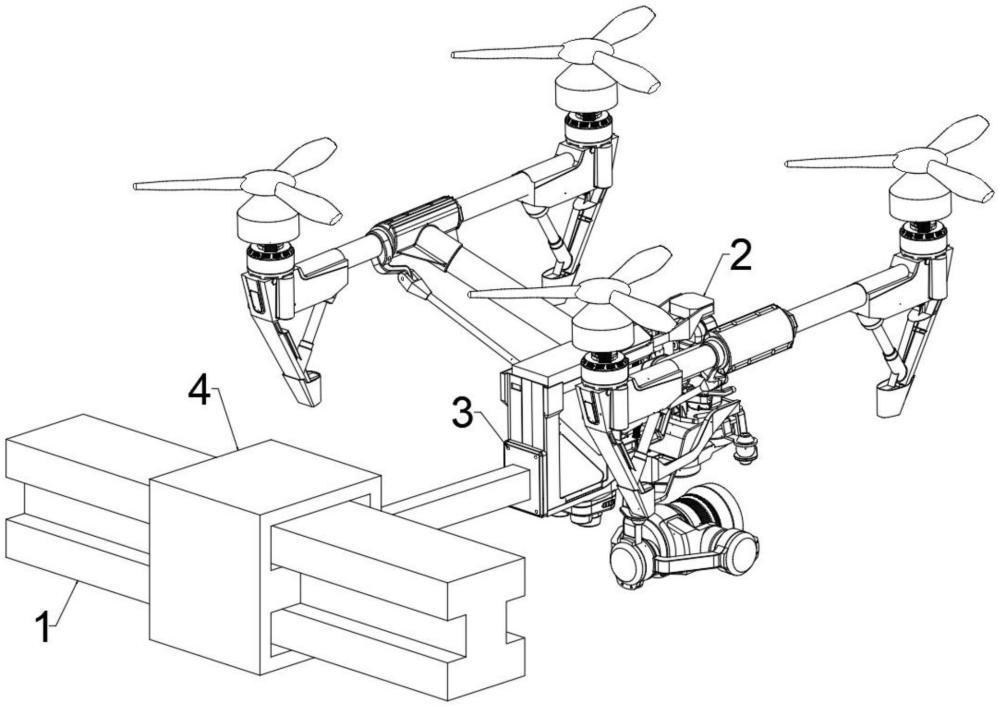
2、为了解决上述技术问题,本实用新型提供如下技术方案:具有避让功能的石油管道巡线用无人机,包括无人机、巡线导轨以及避让机构,所述无人机包括机体、连接块、感应器、摄像头,所述巡线导轨的外侧滑动连接有滑块;
3、所述连接块固定安装于机体的左侧,所述滑块与连接块之间通过避让机构连接,所述感应器设置于无人机的前端,所述摄像头固定安装于机体的下方。
4、本实用新型进一步说明,所述避让机构包括固定杆、驱动腔、连接杆、伸缩杆、导柱、电机、转杆以及挤压杆,所述感应器与电机导线连接;
5、所述固定杆的左端与滑块的右侧固定,所述驱动腔的右侧开设有滑槽,所述固定杆与驱动腔相互固定,所述连接杆与滑槽的内壁滑动连接,所述伸缩杆固定安装于连接杆的右端,且与连接块固定,所述导柱固定安装于驱动腔的内壁;
6、所述连接杆与导柱之间滑动连接,所述连接杆与固定杆相互连接,所述连接杆的下方固定有弧形杆,所述电机固定安装于驱动腔的内壁,所述转杆与电机的输出端固定;
7、所述挤压杆固定安装于转杆的外侧,且与弧形杆对齐,所述挤压杆与弧形杆的外端均为弧形状。
8、本实用新型进一步说明,所述连接杆的左端以及固定杆的右端均具有磁性,且磁极相反。
9、本实用新型进一步说明,所述伸缩杆的下方固定有推杆,所述推杆的左端为弧形状,且与挤压杆对齐;
10、所述伸缩杆内部设置有弹簧。
11、与现有技术相比,本实用新型所达到的有益效果是:本实用新型采用的避让机构,对障碍物进行紧急避让,保护无人机,避让后再通过电机使得挤压杆复位,连接杆失去推力并且受自身重力影响沿滑槽向下滑动复位,从而使得无人机向下移动,无人机遇到障碍物时能够第一时间上下移动对其进行自动避让,最大程度保护无人机,避免损伤无人机,当障碍物较大需要较大的避让动作时,则使电机带动挤压杆转动一百八十度,从而使得挤压杆与推杆相互接触,并相互挤压,推杆受力推动伸缩杆伸长,伸缩杆带动连接块向右移动,从而带动无人机向右移动,同时弹簧受力形变,之后避让完成后再驱动电机复位,弹簧产生的反作用力拉动伸缩杆复位,实现无人机的左右避让动作,进一步提高对无人机的保护力度。
技术特征:
1.具有避让功能的石油管道巡线用无人机,包括无人机、巡线导轨(1)以及避让机构,其特征在于:所述无人机包括机体(2)、连接块(3)、感应器、摄像头,所述巡线导轨(1)的外侧滑动连接有滑块(4);
2.根据权利要求1所述的具有避让功能的石油管道巡线用无人机,其特征在于:所述避让机构包括固定杆(5)、驱动腔(6)、连接杆(7)、伸缩杆(8)、导柱(9)、电机(10)、转杆(11)以及挤压杆(12),所述感应器与电机(10)导线连接;
3.根据权利要求2所述的具有避让功能的石油管道巡线用无人机,其特征在于:所述连接杆(7)的左端以及固定杆(5)的右端均具有磁性,且磁极相反。
4.根据权利要求3所述的具有避让功能的石油管道巡线用无人机,其特征在于:所述伸缩杆(8)的下方固定有推杆(15),所述推杆(15)的左端为弧形状,且与挤压杆(12)对齐;
技术总结
本技术属于石油巡线保护的技术领域,具体涉及具有避让功能的石油管道巡线用无人机,其中包括无人机、巡线导轨以及避让机构,所述无人机包括机体、连接块、感应器、摄像头,所述巡线导轨的外侧滑动连接有滑块;所述连接块固定安装于机体的左侧,所述滑块与连接块之间通过避让机构连接,所述感应器设置于无人机的前端,所述摄像头固定安装于机体的下方,所述避让机构包括固定杆、驱动腔、连接杆、伸缩杆、导柱、电机、转杆以及挤压杆,所述感应器与电机导线连接;所述固定杆的左端与滑块的右侧固定,所述驱动腔的右侧开设有滑槽,该装置解决了当前无法在巡线石油管道时使无人机快速避让,从而躲开障碍物保护无人机的问题。
技术研发人员:刘阳,居竹青,刘屹航
受保护的技术使用者:天和无人机科技溧阳有限公司
技术研发日:20230724
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!