一种能够自主折叠展开的无人机结构、方法及无人机
本发明涉及无人飞行器,具体涉及一种能够自主折叠展开的无人机结构、方法及无人机。
背景技术:
1、无人机凭借其机动灵活、经济实用的优点,受到广泛的关注,多数国家正在大力拓展无人机应用平台,无人机在侦查、运输、打击目标等多个领域起到重要作用。并且随着科学技术的发展,对无人机作业效率提出了更高的要求,无人机集群作业凭借其数量多、检测范围广、故障容错率高、分散作业耗时少的特点,已经成为一种无人机作业趋势。
2、多无人机同时工作意味着需要同时运输存储大量无人机,而无人机复杂的结构会带来无法占据的空间,不仅严重降低运输效率,还会在运输途中由于摆放不规整导致无人机结构损坏,除此之外还会占据极大的存储空间,造成了人力物力的浪费。而折叠形式的无人机具有独特的存储运输优势,可以通过折叠机臂减小自身所占空间,解决了在有限空间内部署和储存多架无人机的问题。通过机臂折叠机制,无人机外形规整,能够以更紧凑、规整的形态存储,最大限度节省空间,适合批量运输投送,以实现最大效率。但无人机机臂折叠设计结构的不合理也会影响无人机飞行的稳定性和耐久性。在无人机机臂折叠和展开的过程中,如果折叠和展开机构所需时间过长,在紧急情况下会严重影响无人机的快速部署。如果折叠过程过于烦琐或由于自动化不够而需要额外的人力支持,将会影响无人机作业的实际效率。
3、为了解决多旋翼无人机机臂折叠自动化程度低、节约收纳空间不够的问题,现有技术提供了如下方案:公告号为cn218751481u的中国实用新型专利提供了一种多旋翼无人机机臂折叠装置,机臂折叠装置包括机身连接体、机臂连接体、连杆、舵机输出体、舵机和舵机安装架,机身连接体和机臂连接体之间设置有连接体旋转铰,连杆第一端通过舵机输出铰铰接舵机输出体,连杆第二端通过连杆-机臂旋转铰铰接机臂连接体。公开号为cn117048874a的中国发明专利申请提供了一种无人机折叠机臂结构,机臂折叠装置包括机身和折叠机臂组件,折叠机臂组件包括主机臂和副机臂,主机臂一端安装在机身上,另一端与副机臂铰接,副机臂可绕主机臂旋转直至固定在相邻的主机臂内侧,该专利虽结构简单,但需要手动辅助机臂折叠复原,费时费力。且上述两个专利均采用铰接折叠,折叠机构增加了无人机的复杂性,使其更容易受到损坏或故障。机械部件的频繁移动和折叠可能增加维护和保养的难度,同时也增加了无人机出现故障的可能性。
4、公开号为cn117227374a的中国发明专利申请提供了一种多旋翼水空跨介质航行器的电驱动折叠臂装置,可以实现基于齿轮传动的无人机机臂的自动折叠,但是其结构较为复杂且结构件数量较多,且传动轴竖直放置增大了机身体积。
技术实现思路
1、鉴于上述问题,本发明提供了一种能够自主折叠展开的无人机结构,解决了现有技术中无人机机臂折叠结构复杂,可靠性低的技术问题。
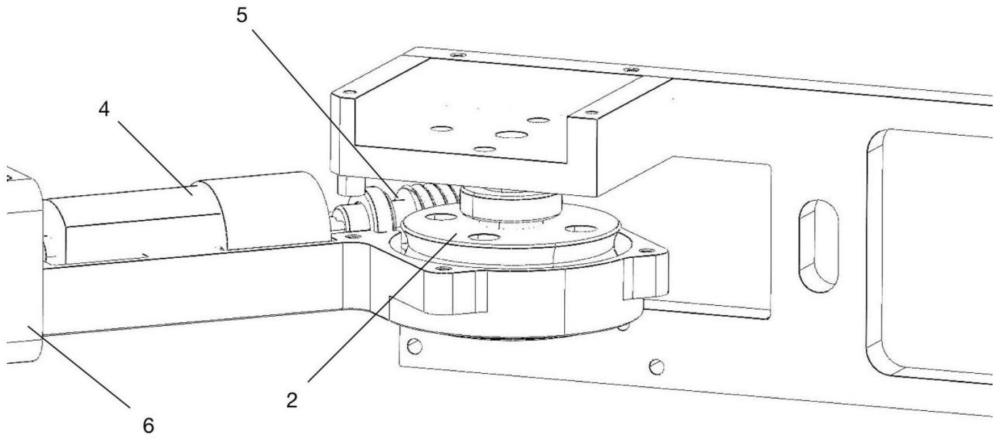
2、第一方面,本发明提供了一种能够自主折叠展开的无人机结构,包括:蜗轮2、无人机机臂3、减速电机4和蜗杆5;所述蜗轮2与无人机机身固定连接;所述无人机机臂3内部中空,所述无人机机臂3内部安装有减速电机4和蜗杆5,所述无人机机臂3与减速电机4、蜗杆5均为固定连接;无人机机臂末端6与无人机机身可转动连接,所述蜗杆5与蜗轮2啮合;减速电机4驱动蜗杆5转动,当蜗杆5转动时,带动无人机机臂3绕蜗轮2转动。
3、优选地,所述无人机机身包括无人机机身框架1,所述无人机机身框架1具有通孔,在所述无人机机身框架1的边缘端固定有蜗轮轴,所述蜗轮2固定在所述蜗轮轴上。
4、优选地,所述无人机机身框架1的边缘端形成一凹槽,所述凹槽在无人机机臂3展开时容纳无人机机臂3末端固定的蜗杆5。
5、优选地,所述蜗杆5两端与轴承环7嵌套。
6、优选地,所述无人机机臂3具有可拆卸外壳,便于拆装内部的所述减速电机4和蜗杆5。
7、优选地,所述无人机机臂末端6可沿蜗轮2的蜗轮轴转动。
8、第二方面,本发明提供了一种具有所述能够自主折叠展开的无人机结构的无人机,其中:所述无人机机身的首尾两端分别设置有所述能够自主折叠展开的无人机结构;所述无人机还包含多个旋翼、控制单元、传感单元。
9、优选地,所述能够自主折叠展开的无人机结构中,无人机机臂3能达到的最大收紧角度为:无人机机臂3与无人机机身框架1垂直。
10、优选地,所述无人机首尾两端分别设有无人机机身框架1,且两个无人机机身框架1的长度不同。
11、第三方面,本发明提供了一种所述能够自主折叠展开的无人机结构的使用方法,其特征在于,包括以下步骤:
12、步骤s1、控制单元接收到无人机展开指令后,控制减速电机4旋转,驱动无人机机臂3向外展开;
13、步骤s2、传感单元检测无人机机臂3旋转角度,当所述旋转角度达到最大展开角度时,传感单元向控制单元发送展开完成指令,控制单元接收到展开完成指令后控制减速电机4停止旋转;
14、步骤s3、控制单元接收到无人机折叠指令后控制减速电机4旋转,驱动无人机机臂3向内折叠;
15、步骤s4、传感单元检测无人机机臂3旋转角度,当所述旋转角度达到最大折叠角度时,传感单元向控制单元发送折叠完成指令,控制单元接收到折叠完成指令后控制减速电机4停止旋转。
16、与现有技术相比,本发明至少具有如下有益效果:
17、(1)本发明所提供的一种基于电机驱动的无人机机臂自主折叠展开装置,折叠展开速度快,结构简单、执行迅速、不易受损,其中无人机机臂旋转角度可灵活调节。
18、(2)本发明提出的无人机机臂折叠结构是通过位于机臂内部的电机、蜗杆和位于机身框架的蜗轮组成的可旋转机构,传动蜗杆水平置于机臂,机臂末端直接与蜗轮嵌套,机臂与机身连接处无明显凸起,无人机机臂折叠后外形规整,可平稳堆叠,极大提高运输效率。
技术特征:
1.一种能够自主折叠展开的无人机结构,包括:
2.根据权利要求1所述的能够自主折叠展开的无人机结构,其特征在于:
3.根据权利要求2所述的能够自主折叠展开的无人机结构,其特征在于:所述无人机机身框架(1)的边缘端形成一凹槽,所述凹槽在无人机机臂(3)展开时容纳无人机机臂(3)末端固定的蜗杆(5)。
4.根据权利要求1所述的能够自主折叠展开的无人机结构,其特征在于:所述蜗杆(5)两端与轴承环(7)嵌套。
5.根据权利要求1所述的能够自主折叠展开的无人机结构,其特征在于:所述无人机机臂(3)具有可拆卸外壳,便于拆装内部的所述减速电机(4)和蜗杆(5)。
6.根据权利要求1所述的能够自主折叠展开的无人机结构,其特征在于:所述无人机机臂末端(6)可沿蜗轮(2)的蜗轮轴转动。
7.一种具有权利要求2-6中任一项所述能够自主折叠展开的无人机结构的无人机,其中:所述无人机机身的首尾两端分别设置有所述能够自主折叠展开的无人机结构;所述无人机还包含多个旋翼、控制单元、传感单元。
8.根据权利要求7所述的无人机,其特征在于:
9.根据权利要求8所述的无人机,其特征在于:所述无人机首尾两端分别设有无人机机身框架(1),且两个无人机机身框架(1)的长度不同。
10.一种根据权利要求7所述的能够自主折叠展开的无人机的使用方法,其特征在于,包括以下步骤:
技术总结
本发明涉及无人飞行器技术领域,具体涉及一种能够自主折叠展开的无人机结构,包括:蜗轮、无人机机臂、减速电机和蜗杆;所述蜗轮与无人机机身的边缘端固定连接;所述无人机机臂内部中空,所述无人机机臂内部安装有减速电机和蜗杆,所述无人机机臂与减速电机、蜗杆均为固定连接;所述蜗杆与蜗轮啮合;减速电机驱动蜗杆转动,当蜗杆转动时,带动无人机机臂绕蜗轮转动;本发明能够克服现有技术中无人机机臂折叠结构复杂,可靠性低的问题。
技术研发人员:屠展,李道春,宗子怡,任文婧,杨彬淇
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!