旋翼与机翼横向组合式倾转旋翼无人机
本发明涉及旋翼飞行器,尤其涉及一种旋翼与机翼横向组合式倾转旋翼无人机。
背景技术:
1、当前市面的无人机载荷有限,且研发高载荷的无人机所付出的代价大,因此需要继续发展一种旋翼与机翼横向组合式倾转旋翼无人机不仅可以通过组合的方式增加或减少无人机有效载荷,以满足灵活多变的运输需求,而且可倾转的旋翼与机翼的无人机机身能够提高无人机前飞时的最大速度,增加了无人机的航程和续航时间。
2、在目前的传统方案中,针对旋翼与机翼横向组合式倾转旋翼无人机的设计较为缺乏,而大部分的技术手段应用在该机型上,存在飞行阻力难以减小,从而导致前飞速度受限的问题;以及,现有的无人机方案中,若要实现机身模块的可组合、可扩展,就需要大量采用螺丝等紧固件来将多个机身模块组合在一起,十分不利于现场的拆装操作。
技术实现思路
1、本发明的实施例提供一种旋翼与机翼横向组合式倾转旋翼无人机,能够提高前飞速度的同时便于现场的拆装操作。
2、为达到上述目的,本发明的实施例采用如下技术方案:
3、一种旋翼与机翼横向组合式倾转旋翼无人机,所述旋翼与机翼横向组合式倾转旋翼无人机由至少一个无人机单元体组成;
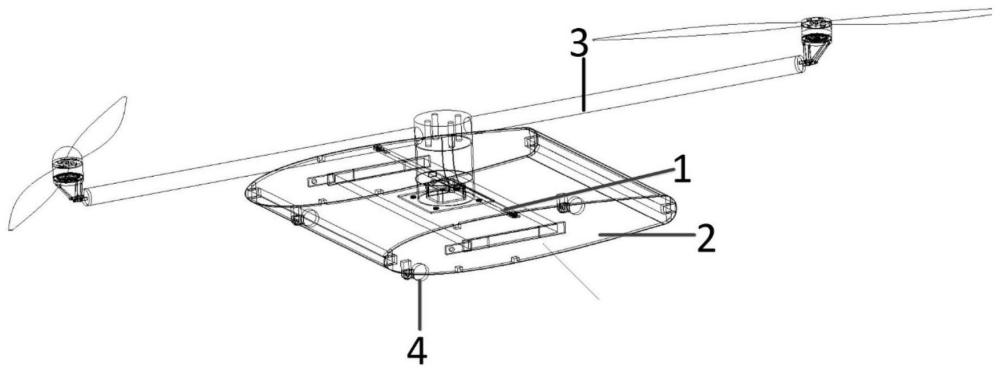
4、在每一个无人机单元体中,包括:连接模块(1)、无人机机身(2)、旋翼系统(3)和起落架(4),其中,旋翼系统(3)安装于无人机机身(2)顶部,起落架(4)安装于无人机机身(2)底部,一个无人机单元体通过自身的连接模块(1)连接另一个无人机单元体;其中,无人机机身(2)截面由高升力低阻力特征的机翼构成,相较于传统的机身,机翼式机身可在保证空气动力优势的同时,增加了连接面积的可接触性;
5、在无人机机身(2)的电池(22)的顶部安装旋翼系统(3),旋翼系统(3)的摆放采用纵列式;
6、旋翼系统(3)包含2个螺旋桨(31),每个螺旋桨(31)安装在对应的电机(32)的转动轴上,电机(32)安装在倾转旋翼机构(33)上,以便于通过转旋翼机构(33)实现电机(32)和螺旋桨(31)的倾转。
7、在无人机机身(2)的内部,电池板(21)与无人机单侧机身板(23)通过接口(见图4)进行固位,随后用紧固件将电池板(21)两端的连接孔与无人机单侧机身板(23)的连接孔进行连接(见图4)。
8、每一侧的无人机单侧机身板(23)设置有6个连接接口;连接接口的位置分别位于无人机机身(2)的截面的弦长10%、40%、60%和80%处,且在弦长为40%和60%处分别设置了上下两个对称分布的连接接口。
9、连接模块(1)置于无人机机身(2)的连接接口处;连接模块(1)由连接横杆(11)和连接头(12-13)组成(见图5)。连接头(12-13)分别置于连接横杆(11)两侧端部;连接头(12-13)与连接横杆(11)通过孔进行连接,其中,在连接状态下将连接头(12-13)一端插入连横杆两侧(11)的圆孔。
10、,连接头(12-13)还可以在孔内进行一小段的位移,实现了连接头(12-13)的伸缩功能。
11、每个无人机单元体的蒙皮采用可拆卸设计,其中,蒙皮(24)通过无人机机身(2)沿横向放置,连接横杆(11)为蒙皮(24)起支撑作用,蒙皮(24)与各个连接接口重合,在进行机身单元体连接的时候还可以对蒙皮进行二次定位和紧固。
12、本实施例中,连接头是位于机身内部的装置。连接装置是另外的一个部件,具体来说,连接装置(5)作用用于连接两个无人机单元体,置于连接头(13)处。本实施例中采用连接装置(5)进行连接;连接装置(5)包括:旋转按钮(51)、推杆(52)、滑块(53)、套筒(54)、弹簧装置(55)和保险装置(56);其中,旋转按钮(51)底部开有双层槽口,第一层槽口用于连接推杆(52),第二层槽口用于旋转锁紧推杆(52);旋转按钮(51)的顶部两侧分别与两个滑块(53)固连;旋转按钮(51)置于套筒(54)内部,套筒(54)两侧开有滑槽,滑槽设有弹簧装置(55),使得弹簧装置(55)位于旋转按钮(51)与套筒(54)之间。滑块(53)的旁边装有保险装置(56),保险装置(56)用于防止单侧机身振动带来旋转按钮(51)偏移;保险装置(56)采用按钮式设计,保险装置(56)置于旋转按钮(51)内部,保险装置(56)内开设有十字槽口并安装有弹簧和挡板,保险装置(56)的挡板和弹簧进行固连,十字槽口内包括一个一字形推杆。所述一字形推杆由三部分组成,包括:作为头部的操纵部分(i),作为中部的构造部分(ii),作为尾部的旋转部分(iii),一圆杆(vi)从连接三个部分。保险装置(56)的操作方式包括:将所述一字形推杆的所有部分以竖直方式推入所述十字形槽口,并施加压力使所述一字形推杆进入至所述十字形槽口的底部,此时旋转操纵部分(i)90°,由于槽构造原因,构造部分(ii)不发生旋转,旋转部分(iii)跟随构造部分同样旋转约90°后,解除压力,“一”字形推杆由于挡板底部弹簧弹性恢复力作用向外位移一小段距离,此时操纵部分(i)为水平状态,且操纵部分(i)的两侧分别与滑块一侧和滑槽一侧相交,可以有效避免机身振动影响旋转旋钮进行复位的情况。
13、一个无人机单元体与另一个无人机单元体组合的方式,包括:将一个无人机单元体的连接头(12-13)推入另一无人机单元体的连接横杆(11),此时另一无人机单元体的连接头(12-13)被压缩至连接横杆(11)内部,使得一个无人机单元体的连接头(12-13)的连接孔与另一个无人机单元体的连接横杆(11)的连接孔同心。
14、当一个无人机单元体的连接头(12-13)的连接孔与另一个无人机单元体的连接横杆(11)的连接孔同心后,将推杆(52)穿过旋转按钮(51)底部的第一层槽口,并与旋转按钮(51)实现同心的配合,从而将按钮式连接装置安放在所需连接孔处;之后按压的旋转按钮(51)并带动推杆(52)下移,推杆(52)移动到指定位移后,旋转旋转按钮(51),推杆(52)的底部进入连接横杆(11)下槽位,且推杆(52)与旋转按钮(51)共同转动,此时,按钮无法进行因弹簧回复力所带来纵向位移的操作,推杆(52)也通过旋转操作也进入了预期槽位。
15、本发明实施例提供的旋翼与机翼横向组合式倾转旋翼无人机,便于在现场进行地面组装和拆卸,在飞行时,可将旋翼变换为倾转状态。无人机采用横向排列的连接方式,一个无人机单元体是通过横截面为翼型的机身、蒙皮和旋翼系统的组合实现一种旋翼与机翼横向组合式倾转旋翼无人机的总体设计。组合式倾转旋翼无人机的连接方式为:一个飞行模块的一侧机身与另一个飞行模块的一侧机身之间进行连接,连接方式为接口连接,连接装置插入两接口中部。连接装置操作为:按下按钮,推杆下移,旋转上部分,锁紧推杆,连接两侧单侧机身。连接装置拆解的过程为:旋转顶部的旋钮,推杆解除限制,同时,推杆由于弹簧作用力上移,连接装置也弹出,进而解除单侧机身连接状态。从而在提高前飞速度的同时便于现场的拆装操作。
技术特征:
1.一种旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,所述旋翼与机翼横向组合式倾转旋翼无人机由至少一个无人机单元体组成;
2.根据权利要求1所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,在无人机机身(2)的内部,电池板(21)与无人机单侧机身板(23)通过接口进行固位,随后用紧固件将电池板(21)两端的连接孔与无人机单侧机身板(23)的连接孔进行连接;
3.根据权利要求2所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,每一侧的无人机单侧机身板(23)设置有6个连接接口;
4.根据权利要求2或3所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,连接模块(1)置于无人机机身(2)的连接接口处;
5.根据权利要求4所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,每个无人机单元体的蒙皮采用可拆卸设计,其中,蒙皮(24)通过无人机机身(2)沿横向放置,连接模块(1)蒙皮(24)起支撑作用,蒙皮(24)与各个连接接口重合。
6.根据权利要求1所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,采用连接装置(5)进行连接,连接装置(5)作用用于连接两个无人机单元体,置于连接头(13)处;
7.根据权利要求6所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,滑块(53)的旁边装有保险装置(56),保险装置(56)用于防止单侧机身振动带来旋转按钮(51)偏移;
8.根据权利要求7所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,所述一字形推杆由三部分组成,包括:作为头部的操纵部分(i),作为中部的构造部分(ii),作为尾部的旋转部分(iii),一圆杆(vi)从连接三个部分。
9.根据权利要求6所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,一个无人机单元体与另一个无人机单元体组合的方式,包括:
10.根据权利要求9所述的旋翼与机翼横向组合式倾转旋翼无人机,其特征在于,当一个无人机单元体的连接件(12-13)的连接孔与另一个无人机单元体的连接横杆(11)的连接孔同心后,
技术总结
本发明实施例公开了一种旋翼与机翼横向组合式倾转旋翼无人机,涉及旋翼飞行器技术领域,能够在地面进行组装和拆卸,在飞行时,可将旋翼变换为倾转状态。本发明中无人机采用横向排列的连接方式,一个无人机称之为一个飞行模块,一个飞行模块是通过横截面为翼型的机身、蒙皮和旋翼系统的组合实现一种旋翼与机翼横向组合式倾转旋翼无人机的总体设计。组合式倾转旋翼无人机的连接方式为:一个飞行模块的一侧机身与另一个飞行模块的一侧机身之间进行连接,连接方式为接口连接,连接装置插入两接口中部。
技术研发人员:王正铧,韩东,徐新玉
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!