一种基于航拍和地面监测的农作物杂草识别装置及方法
本发明涉及杂草识别,具体地说,涉及一种基于航拍和地面监测的农作物杂草识别装置及方法。
背景技术:
1、在大面积田间种植农作物时,田间往往会伴随杂草生长,此时就需要除草避免杂草影响农作物生长;在除草之前需要对杂草种类进行识别,以便使用对应的除草剂进行清除;目前在识别田间杂草时,一般用到无人机拍摄,之后通过图像识别技术进行杂草识别,但是无人机拍摄一般需要飞到高空然后进行大面积拍摄,这种拍摄方式由于距离较远,对杂草的种类识别较差;还有一种方式是通过拍摄小车在田间行走拍摄杂草,这种拍摄方式虽然能够清除拍摄杂草种类,但是种植田面积较大,从而导致效率较低,并且较难找出杂草生长茂盛的区域;为了解决无人机和小车带来的问题,目前还具有在无人机下方设置滚轮的两用机,但是无人机在升空拍摄时摄像头是在无人机下方的,当无人机落地时,摄像头依然在无人机下方,容易导致在无人机在走动过程中,无人机下方的摄像头易触碰田间岩石或土堆,从而导致摄像头损坏。
技术实现思路
1、针对现有技术中存在的缺陷,本发明提供了一种基于航拍和地面监测的农作物杂草识别装置及方法。其能够解决无人机在田间行走时,下端摄像头易触碰田间岩石或土堆的问题,达到防止无人机摄像头发生损坏效果。
2、为了解决上述技术问题,本发明通过下述技术方案得以解决:
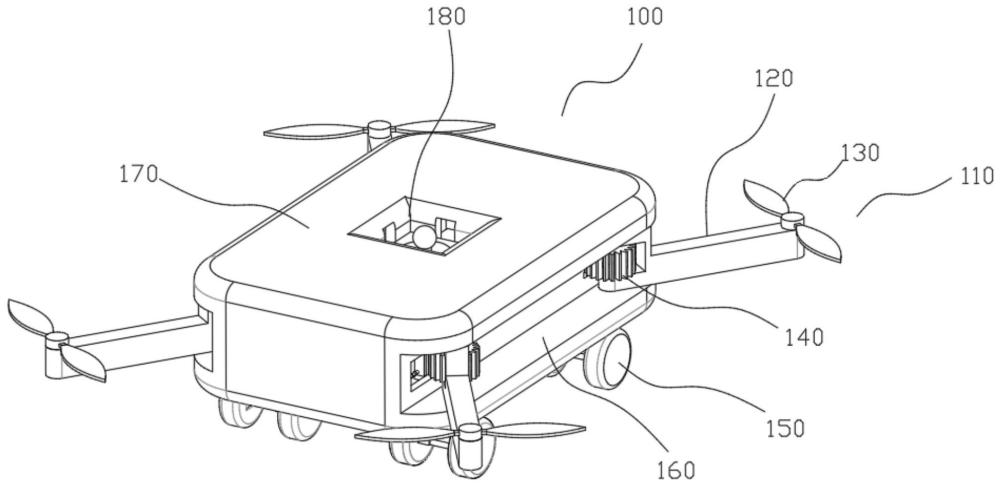
3、一种基于航拍和地面监测的农作物杂草识别装置,其包括无人机主体,无人机主体包括壳体;壳体外部设有多个机翼组件和多个滚轮组件;壳体内部设有安装腔;安装腔内部设有贯穿壳体的安装通道,安装通道内部设有升降台,升降台上端设有第一摄像头,升降台下端设有第二摄像头;安装腔内部设有驱动组件,驱动组件用于驱动升降台沿安装通道移动。
4、通过本发明,无人机在拍摄杂草时,首先通过机翼组件使无人机升空,在驱动组件的推动下升降台将第二摄像头推出安装通道,使第一摄像头缩回安装通道,无人机在高空中通过其下端的第二摄像头拍摄田间杂草,并记录田间杂草生长的茂盛区域;当高空拍摄完成后,无人机降落至地面,在落地后驱动组件驱动升降台,将第二摄像头缩回安装通道内,同时第一摄像头伸出安装通道,并且位于无人机上端,之后无人机通过滚轮组件,带动无人机在田间进行近距离拍摄杂草;从而防止第二摄像头在无人机在田间行走过程中触碰田间岩石或土堆,从而导致损坏;同时第一摄像头位于无人机上端,从而较佳的方便了第一摄像头拍摄杂草全貌;第一摄像头远离地面,防止因岩石或土堆触碰损坏第一摄像头。
5、作为优选,安装通道侧部处设有沿安装通道长度方向设置,并且与安装腔相通的第一通孔;驱动组件包括2个设置于安装通道外侧壁上的第一安装板,所述2个第一安装板之间设有电机,电机上端设有穿过第一安装板与电机转轴相连接的螺纹杆,电机下端设有与第一安装板相连接的导向杆;升降台侧壁处设有穿过第一通孔与螺纹杆相配合的第一连接板,以及与导向杆相配合的第二连接板;第一连接板处供螺纹杆穿过的螺纹孔;第二连接板处设有供导向杆穿过的导向孔。
6、通过本发明,电机驱动螺纹杆转动,螺纹杆转动带动第一连接板沿螺纹杆轴向移动,从而带动升降台移动,升降台移动带动第一摄像头或者第二摄像头伸出或缩回安装通道内,使得第一摄像头从壳体上端伸出时,第二摄像头缩回安装通道内,第二摄像头从壳体下端伸出时,第一摄像头缩回安装通道内;从而防止第二摄像头在无人机在田间行走过程中触碰田间岩石或土堆,从而导致损坏;第一摄像头伸出安装通道时远离地面,防止因岩石或土堆触碰损坏第一摄像头;升降台在移动过程中,带动第二连接板沿着导向杆移动,从而提升了升降台移动时的稳定性。
7、作为优选,机翼组件包括与壳体相铰接的连接杆,连接杆远离壳体一端设有螺旋叶片;连接杆靠近铰接处设有齿轮,壳体外侧壁处设有供齿轮穿过伸入安装腔内的第二通孔;安装腔内位于安装通道两侧均设有推板,推板靠近第二通孔的一端侧壁处设有第一倾斜面;安装腔内设有沿安装腔长度方向设置的滑杆,安装腔内靠近第二通孔处设有滑动块;滑动块上设有供滑杆穿过的第三通孔;
8、滑动块靠近第一倾斜面的一端设有与第一倾斜面相配合的第二倾斜面;滑杆上套有推动滑动块抵在第一倾斜面上的第一弹簧;滑动块靠近第二通孔的一端面处设有与齿轮相配合的齿槽;安装通道靠近推板的侧壁处设有沿安装通道长度方向设置的第四通孔,升降台侧壁处设有穿过第四通孔与推板相连接的连接柱。
9、通过本发明,无人机落地后,电机驱动升降台向上移动,此时第一摄像头被推出安装通道,在升降台向上移动的过程中,升降台带动推板向上移动,推板移动过程中,推板上的第一倾斜面挤压滑动块上的第二倾斜面,使滑动块沿着滑杆滑动,并且在滑动块滑动过程中,滑动块上的齿槽会推动机翼组件上的齿轮转动,齿轮带动连接杆转动,从而使连接杆转动至与壳体平行,从而收缩机翼组件,缩小无人机体积,使得无人机在田间行走时更加方便;同时防止无人机在田间行走过程中连接杆受到岩石撞击而造成损坏;
10、当无人机需要升空时,升降台下移,使第二摄像头伸出安装通道,此时第一弹簧推动滑动块移动,使滑动块带动齿轮转动,从而将连接杆展开,方便无人机起飞。
11、作为优选,推板处设有沿推板高度方向设置的第五通孔;安装腔内设有沿安装腔高度方向设置,并且穿过第五通孔的导向柱。
12、通过本发明,推板在移动过程中沿着导向柱轴向移动,从而较佳的提升了推板移动时的稳定性。
13、作为优选,壳体靠近机翼组件的侧壁处设有沿壳体长度方向设置的收纳槽,第二通孔位于收纳槽端面处。
14、通过本发明,连接杆在转动至与壳体平行时,进入收纳槽内,从而防止连接杆在无人机行走过程中受到碰撞产生损坏。
15、作为优选,导向柱和第五通孔的横截面呈矩形。
16、通过本发明,减小推板在移动过程中的晃动,提升推板移动过程中的稳定性。
17、作为优选,滑杆和第三通孔的数量为2个。
18、通过本发明,提升滑动块移动时的稳定性。
19、作为优选,滚轮组件包括平行设置的第一滚轮和第二滚轮;壳体靠近第一滚轮的端面处设有倾斜设置的套筒,第一滚轮靠近套筒一端设有连接第一滚轮并伸入套筒内的第一伸缩杆;第一滚轮靠近第一伸缩杆一端设有伸向第二滚轮的安装柱,安装柱靠近第二滚轮的一端面向内凹陷形成安装槽,第二滚轮处设有摄入安装槽内第二伸缩杆;第二伸缩杆侧壁处设有穿过壳体伸入安装腔内的第三伸缩杆;滑动块远离第二倾斜面的一端设有供第三伸缩杆挤压的第三倾斜面;
20、安装腔内靠近第三伸缩杆处设有垂直于壳体上的立柱,第三伸缩杆侧壁处设有安装块,安装块处设有供立柱穿过的第六通孔;立柱上端设有挡板,立柱侧壁处套有第二弹簧,第二弹簧用于推动挡板,使第三伸缩杆挤压第三倾斜面。
21、通过本发明,在无人机落地后,升降台上升,将第一摄像头推出安装通道,在升降台上升的过程中带动推板上升,推板推动滑动块移动,滑动块移动过程中,滑动块上的第三倾斜面挤压第三伸缩杆上的第四倾斜面,使第三伸缩杆下移,伸出壳体,从而使无人机的地盘升高,防止无人机在田间行走时,地面刮蹭壳体;在无人机的地盘升高时,第一伸缩杆从套筒内向外延伸,在第一伸缩杆移动的过程中,第二伸缩杆从安装槽内伸出,使得第一滚轮和第二滚轮之间的间距增大,当第一滚轮和第二滚轮之间间距增加时,小车的横向稳定性得到增强;使得无人机在田间不平坦的地面上更好地分散重力,减少因地面不平导致的侧倾现象;当无人机需要升空时,升降台下移,使第二摄像头伸出安装通道,此时推板下降,安装块在第二弹簧的推动下,使第三伸缩杆伸向安装腔内,从而减小壳体与地面之间的距离,同时第一滚轮和第二滚轮之间间距缩小,从而防止在高空拍摄时,第一滚轮和第二滚轮阻挡第二摄像头视野。
22、作为优选,第三伸缩杆靠近第三倾斜面的一端设有与第三倾斜面相贴合的第四倾斜面。
23、通过本发明,在滑动块推动第三伸缩杆时,第三伸缩杆上的第四倾斜面与滑动块上的第三倾斜面相互接触,从而方便滑动块推动第三伸缩杆移动。
24、本发明提供了一种基于航拍和地面监测的农作物杂草识别方法,步骤如下,
25、s1、高空图像采集,启动无人机,通过机翼组件使无人机升空,之后通过无人机下方的第二摄像头高空拍摄田间的杂草分布情况,定位杂草严重的区域;
26、s2、地面图像采集,待高空图像采集完成后,无人机降落,通过滚轮组件在田间行走,并通过无人机上方的第一摄像头,近距离拍摄田间杂草的颜色、纹理、形状;
27、s3、杂草识别,无人机将拍摄的图像上传,通过图像识别技术,识别杂草种类。
28、通过本发明,利用无人机和地面设备拍摄农田图像,然后通过图像处理和机器学习算法对图像进行分析,提取杂草的特征,如颜色、形状、纹理等,从而实现对杂草的识别;从而可以快速、准确地识别出杂草,并且可以对大面积农田进行快速巡查。
- 还没有人留言评论。精彩留言会获得点赞!