集装箱式无人机机巢及工作方法与流程
本发明涉及一种集装箱式无人机机巢及工作方法,属于无人机机巢。
背景技术:
1、近年来,无人机在各行各业的应用越来越普及,应用场景、任务类型也越来越丰富;很多情况下,单机机巢的方式已经无法满足高效的任务需求,因此,“一巢多机”的自动管理、集群控制的新业态成为无人机机巢领域的新方案、新途径,同时,在机巢中开发无人机的全自动管理系统,满足多架无人机的放飞、降落、收纳、加油、充电、数据管理等一系列功能,是新的发展方向和应用需求,也可极大的提升无人机的综合应用效率和能力。
2、目前,用于垂起固定翼无人机的机巢,在采用“一巢多机”的设计中存在多个技术难点需要克服:
3、(1)在有限的空间内,需要实现多架无人机的放飞、降落、收纳工作,需要极为巧妙的空间布局,用以停放多架垂起固定翼无人机,提高有限空间的利用率;
4、(2)在机巢内部,需要实现对多架垂起固定翼无人机进行充电操作,读取无人机信息;
5、(3)在机巢内部,需要实现对多架垂起固定翼无人机进行全自动加油操作,并确保加油安全;
6、(4)垂起固定翼无人机在起飞与降落过程中,需要起降平台具有增稳功能,确保颠簸、晃动环境下无人机依然能够平稳起降。
技术实现思路
1、本发明的目的是提供一种集装箱式无人机机巢,同时提供一种集装箱式无人机机巢的工作方法,用以解决现有“一巢多机”的设计中存在的技术难点。
2、本发明第一部分:
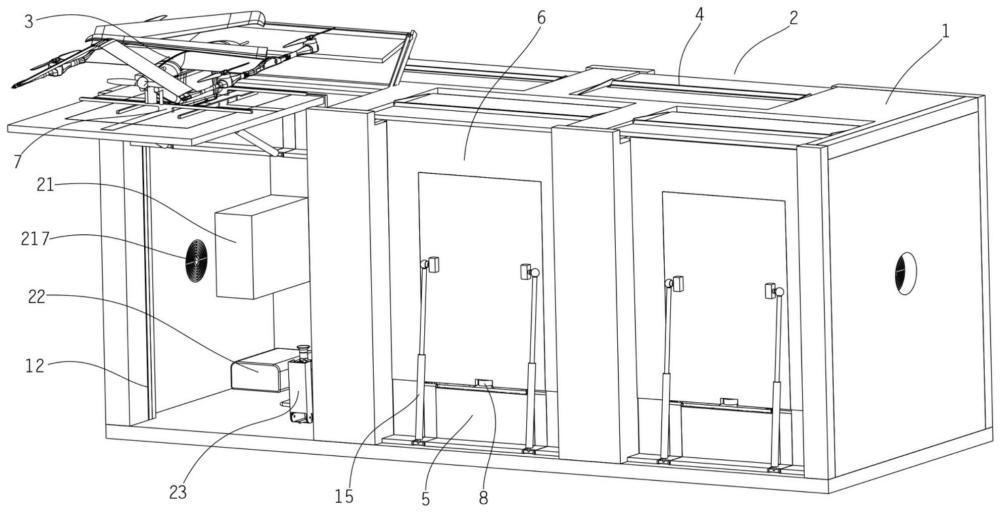
3、集装箱式无人机机巢,包括:
4、箱体,所述箱体是矩形长方体结构,在箱体长度方向两侧设置若干个机位,在箱体顶部设置与若干个机位对应配合的若干个顶部舱门;
5、在每个机位处均设置有无人机起降系统;
6、所述无人机起降系统包括固定座、停机坪、归中机构、升降机构以及翻转和增稳机构;所述升降机构用于驱动固定座沿竖直方向上升和下降,所述停机坪与固定座通过双自由度转轴连接,所述归中机构设置在停机坪正面,归中机构用于归中锁紧无人机,所述翻转和增稳机构连接在停机坪背面与固定座之间,所述翻转和增稳机构用于调节停机坪的姿态角度;收纳状态下,停机坪垂直于水平面呈竖直状态,且停机坪正面朝向箱体内部,起降状态下,停机坪平行于水平面呈水平状态,且停机坪正面朝向天空;
7、机巢控制系统,所述机巢控制系统用于控制每个机位处的无人机起降系统工作以及顶部舱门的开启和关闭。
8、作为本发明的优选,所述升降机构采用齿轮齿条机构、丝杆丝母机构或直线电机模组中的任一种;所述齿轮齿条机构、丝杆丝母机构或直线电机模组均包括两组执行部件,两组执行部件对称设置在机位的两侧,所述固定座的两端分别与两组执行部件连接,两组执行部件同步动作驱动固定座沿竖直方向上升和下降;确保停机坪上的无人机在升降过程中的安全性。
9、作为本发明的优选,所述归中机构上设置有与无人机脚架上的锁定销对应配合的锁定销孔,所述归中机构上还设置有与无人机脚架上的触点对应配合的触头,归中机构将无人机归中锁紧后,锁定销插入锁定销孔中,触头与触点接触形成多个电路通路;机巢控制系统通过触头与触点接触形成的多个电路通路对无人机进行充电和通讯交互;满足无人机的充电需求,实现自动对无人机进行充电操作和读取无人机信息。
10、作为本发明的优选,所述固定座是l型板,l型板的纵向板顶部边沿通过双自由度转轴与停机坪连接,所述翻转和增稳机构包括增稳控制器、高精度imu传感器和两根电推杆,所述高精度imu传感器设置在停机坪上并与增稳控制器通信连接,所述两根电推杆相互平行间隔布置,电推杆的尾端与l型板的横向板铰接,电推杆的执行端与停机坪背面球铰连接,电推杆的伺服电机与增稳控制器通信连接;高精度imu传感器用于实时感知停机坪的姿态,并将停机坪的姿态信息发送给增稳控制器,增稳控制器对停机坪的姿态信息进行解算,并将解算结果转换成电推杆的动作指令输出至电推杆的伺服电机,两根电推杆根据动作指令协同伸缩运动调节停机坪的姿态角度,所述姿态角度包括俯仰角度和横滚角度。
11、作为本发明的优选,在箱体内部设置加油系统,所述加油系统由机巢控制系统控制工作,所述加油系统用于给收纳状态的无人机进行加油;所述加油系统包括储油箱、加油泵以及若干个加油机构,若干个加油机构设置在若干个机位处,加油机构与无人机的加油口对应配合,加油泵用于将储油箱中的燃油泵至加油机构,并通过加油机构输送给无人机;实现对多架无人机进行全自动加油操作。
12、进一步,所述加油机构包括可调节安装底座ⅰ、可调节安装底座ⅱ、对接驱动电缸、对接安装座、支路油管以及自动锁紧密封装置;所述可调节安装底座ⅰ和可调节安装底座ⅱ采用可调节式铰接连接,所述对接驱动电缸安装在可调节安装底座ⅱ上,所述对接安装座安装在对接驱动电缸的执行端,所述支路油管穿过对接安装座后与自动锁紧密封装置连接,且支路油管和自动锁紧密封装置均与对接安装座固定连接,在支路油管上设置支路切断阀;对接驱动电缸用于驱动对接安装座位移,对接安装座带动支路油管和自动锁紧密封装置与无人机的加油口对接。
13、作为本发明的进一步优选,在箱体内部设置有可燃气体浓度探测器,在箱体的两端分别设置有通风设备,所述可燃气体浓度探测器与通风设备连锁控制;当可燃气体浓度探测器探测到箱体内部可燃气超标时,通风设备能够及时启动,快速排出箱体内部可燃气,保证机巢的安全性。
14、本发明第二部分:
15、集装箱式无人机机巢的工作方法,包括:
16、(1)机巢执行无人机放飞任务:
17、机巢控制系统选择其中一个停放有无人机的机位执行无人机放飞任务,开启机位处的顶部舱门,机位处的无人机起降系统开始工作,首先升降机构驱动固定座沿竖直方向上升至指定位置,然后翻转和增稳机构调节停机坪使停机坪从竖直状态翻转呈水平状态,随后翻转和增稳机构实时调节停机坪的姿态角度,使停机坪始终保持水平状态,接着归中机构释放无人机,此时,停机坪上的无人机可以随时起飞;
18、待无人机起飞后,翻转和增稳机构停止实时调节停机坪的姿态角度,然后翻转和增稳机构调节停机坪使停机坪从水平状态翻转呈竖直状态,随后升降机构驱动固定座沿竖直方向下降至初始位置,最后关闭机位处的顶部舱门,完成无人机放飞任务;
19、(2)机巢执行无人机降落收纳任务:
20、机巢控制系统选择其中一个未停放无人机的机位执行无人机降落收纳任务,开启机位处的顶部舱门,机位处的无人机起降系统开始工作,首先升降机构驱动固定座沿竖直方向上升至指定位置,然后翻转和增稳机构调节停机坪使停机坪从竖直状态翻转呈水平状态,随后翻转和增稳机构实时调节停机坪的姿态角度,使停机坪始终保持水平状态,此时,无人机可以随时降落在停机坪上;
21、待无人机降落后,归中机构对无人机进行归中锁紧,然后翻转和增稳机构停止实时调节停机坪的姿态角度,随后翻转和增稳机构调节停机坪使停机坪从水平状态翻转呈竖直状态,接着升降机构驱动固定座沿竖直方向下降至初始位置,最后关闭机位处的顶部舱门,完成无人机降落收纳任务。
22、作为本发明方法的优选,所述翻转和增稳机构实时调节停机坪的姿态角度包括以下步骤:
23、高精度imu传感器实时感知停机坪的姿态,并将停机坪的姿态信息发送给增稳控制器,增稳控制器对停机坪的姿态信息进行解算,并将解算结果转换成电推杆的动作指令输出至电推杆的伺服电机,两根电推杆根据动作指令协同伸缩运动调节停机坪的姿态角度。
24、作为本发明方法的优选,还包括:
25、机巢执行无人机加油任务:
26、机巢控制系统对若干个机位执行无人机加油任务,加油泵启动将储油箱中的燃油泵至加油机构,并通过加油机构输送给无人机。
27、本发明的有益之处在于:
28、(1)机巢可以采用标准集装箱进行改装和伪装涂装,空间布局巧妙、合理,便于停放多架垂起固定翼无人机,提高有限空间的利用率,实现在有限的空间内,满足多架无人机的放飞、降落、收纳工作;
29、(2)实现对多架垂起固定翼无人机进行充电操作,并方便读取无人机信息;
30、(3)实现对多架垂起固定翼无人机进行全自动加油操作,并确保加油安全;
31、(4)垂起固定翼无人机在起飞与降落过程中,停机坪具有增稳功能,确保颠簸、晃动环境下无人机依然能够平稳起降。
- 还没有人留言评论。精彩留言会获得点赞!