一种仿甲虫可折叠扑翼飞行机器人
本技术涉及微型飞行机器人设计及制造,具体而言,涉及一种仿甲虫可折叠扑翼飞行机器人。
背景技术:
1、自然界的昆虫拥有高超的超低空飞行能力,灵活性和机动性更是让人类所设计的飞行器望其项背。微型扑翼飞行机器人便是从仿生学角度采用翅翼的周期性扑动实现巡航、垂直飞行和悬停等飞行模态,其相对于固定翼和旋翼具有更高的飞行效率和机动性能,其发展方向已逐渐成为热点研究课题。其中,鞘翅目昆虫(甲虫)在不飞行时可将其膜质后翅折叠收拢于鞘翅之下,在需要飞行时才将后翅展开,其后翅所具有的可折叠特性使其同时具备了优异的飞行能力和良好的环境适应性。但是,目前所设计的大多数飞行机器人的机翼无法折叠靠拢于机身,在飞行结束后的携带运输过程中,裸露在外的机翼很容易与其他物体接触产生弯曲变形,进而整机的装配性能可能受到影响,从而影响下一次任务时的飞行姿态。因此,如何使扑翼飞行机器人的机翼具有可靠拢于机身的折叠特性是亟待解决的问题。
技术实现思路
1、本技术提供一种仿甲虫可折叠扑翼飞行机器人,可智能控制扑翼飞行机器人的机翼展开或折叠,其机翼具有可靠拢于机身的折叠特性,解决了现有技术中由于扑翼飞行机器人的机翼裸露于机身外侧而易损的问题。
2、具体的技术方案如下:
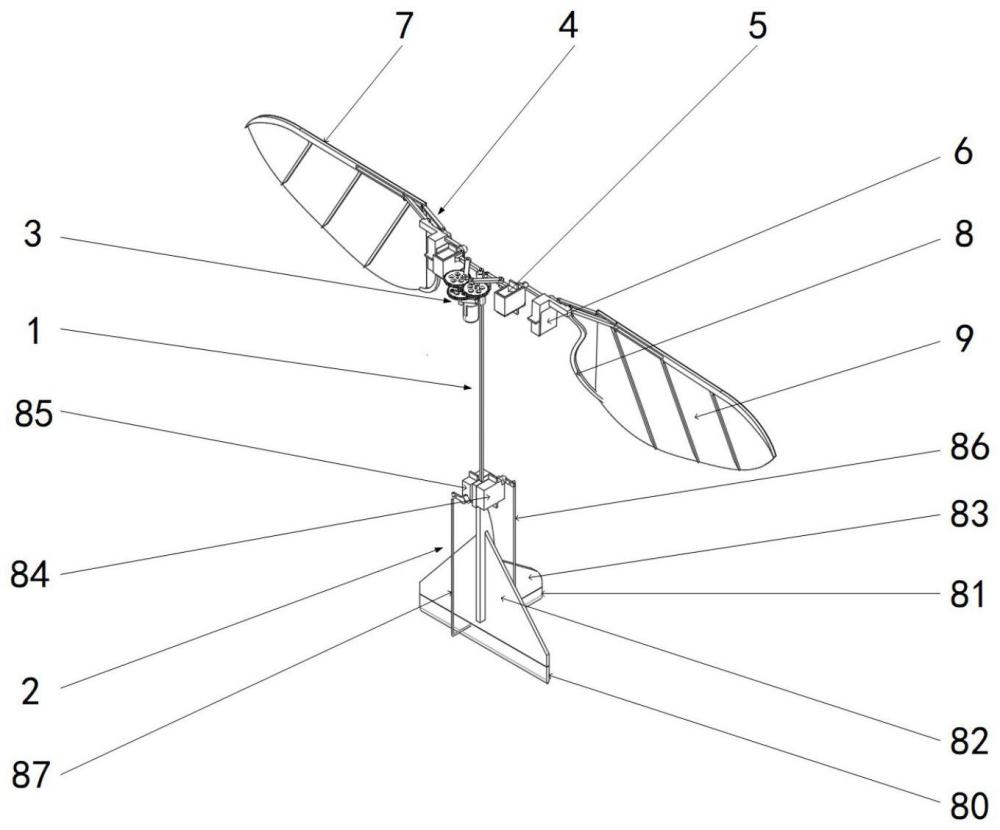
3、本技术实施例提供了一种仿甲虫可折叠扑翼飞行机器人,包括:机身、尾翼、扑翼驱动装置以及分别位于所述机身两侧的两组机翼机构,所述尾翼设置于所述机身的一端,所述扑翼驱动装置设置于所述机身的另一端,且两组所述机翼机构分别与所述扑翼驱动装置相连,所述扑翼驱动装置用于驱动两组所述机翼机构进行扑翼运动,带动所述仿甲虫可折叠扑翼飞行机器人飞行;
4、每组所述机翼机构均分别包括第一舵机、第二舵机、机翼架、ap杆、机翼膜、第一摆杆、第二摆杆、第三摆杆、连接轴、第一转动轴、第二转动轴、第三转动轴,所述机翼架的翼根端设置有贯穿所述机翼架相对两侧面的连接槽,所述连接槽的开口端设置有第一转动轴,所述连接槽内设置有第二转动轴,所述第一舵机与所述扑翼驱动装置固定连接,且所述第一舵机沿第一方向延伸设置,所述第一舵机的转动轴沿第二方向延伸设置,所述第一摆杆的第一端与所述第一舵机的转动轴固定连接,所述第二舵机设置于所述第一摆杆的中部,且所述第二舵机的转动轴沿垂直所述第一摆杆的方向延伸设置,所述第一舵机的转动轴的旋转平面与所述第二舵机的转动轴的旋转平面相互垂直,所述第二舵机的转动轴上设置有摇臂,所述摇臂远离所述第二舵机的转动轴的一端通过所述连接轴与所述第二摆杆的第一端固定连接,所述第二摆杆的第二端通过所述第一转动轴与所述机翼架转动连接,所述第三摆杆的第一端通过所述第三转动轴与所述第一摆杆的第二端转动连接,所述第三摆杆的第二端通过所述第二转动轴与所述机翼架转动连接,且所述第二摆杆与所述第三摆杆平行设置,所述ap杆的翼根端与所述第二摆杆的第一端固定连接,所述机翼膜铺设于所述机翼架、所述第二摆杆和所述ap杆上,所述机翼架、所述第二摆杆、所述ap杆以及所述机翼膜形成所述仿甲虫可折叠扑翼飞行机器人的机翼;
5、其中,所述第一方向为所述机身的延伸方向,所述第一方向与所述第二方向相互垂直。
6、在本技术的一些实施例中,所述机身包括机架和机身杆,所述扑翼驱动装置设置于所述机架上,所述机架与所述机身杆的第一端固定连接,所述尾翼设置于所述机身杆的第二端上。
7、在本技术的一些实施例中,所述机架包括第一支撑架、第二支撑架、第一孔柱体、第二孔柱体、第三孔柱体、第四孔柱体、第五孔柱体、第六孔柱体以及第七孔柱体,所述第一支撑架与所述第二支撑架沿所述第二方向相互连接,所述第一支撑架包括相对设置的第一侧面和第二侧面,所述第一孔柱体和所述第二孔柱体设置于所述第一侧面的中部,且所述第一孔柱体和所述第二孔柱体的中心连线沿第三方向延伸,所述第三孔柱体设置于所述第二侧面的中部,所述第一孔柱体上设置有第一安装孔,所述第二孔柱体上设置有第二安装孔,所述第三孔柱体上设置有第三安装孔,所述第二支撑架包括相对设置的第三侧面和第四侧面,所述第三侧面与所述第一侧面处于同一水平面上,所述第四侧面与所述第二侧面处于同一水平面上,所述第四孔柱体设置于所述第四侧面上,所述第四孔柱体上设置有贯穿所述第三侧面的第四安装孔,所述第五孔柱体设置于所述第三侧面远离所述第一支撑架的一端,所述第五孔柱体与所述第四孔柱体的中心连线在所述第三侧面上的投影沿所述第二方向延伸,所述第五孔柱体上设置有第五安装孔,所述第六孔柱体和所述第七孔柱体设置于所述第三侧面上,且分别位于所述第五孔柱体与所述第四孔柱体的中心连线在所述第三侧面上的投影的两侧,所述第六孔柱体上设置有第六安装孔,所述第七孔柱体上设置有第七安装孔,所述第一安装孔的中心轴线、所述第二安装孔的中心轴线、所述第三安装孔的中心轴线、所述第四安装孔的中心轴线、所述第五安装孔的中心轴线、所述第六安装孔的中心轴线以及所述第七安装孔的中心轴线均沿所述第一方向延伸设置,所述机身杆的第一端插设于所述第三安装孔内;
8、所述扑翼驱动装置包括空心杯电机、电机齿轮、第一曲柄齿轮、第二曲柄齿轮、一级减速大齿轮、二级减速小齿轮、第四摆杆、第五摆杆、第四转动轴、第五转动轴、第六转动轴、第七转动轴、第八转动轴、第九转动轴、第十转动轴、第十一转动轴、第十二转动轴、第一曲柄、第二曲柄,所述空心杯电机设置于所述第四孔柱体上,且所述空心杯电机的电机轴穿设所述第四安装孔至所述第三侧面,所述电机齿轮固定设置于所述空心杯电机的电机轴上,所述第四转动轴的一端转动设置于所述第五安装孔内,所述一级减速大齿轮和所述二级减速小齿轮均固定设置于所述第四转动轴上,且所述一级减速大齿轮位于所述第五孔柱体与所述二级减速小齿轮之间,所述第五转动轴的一端转动设置于所述第六安装孔内,所述第一曲柄齿轮固定设置于所述第五转动轴上,所述第六转动轴的一端转动设置于所述第七安装孔内,所述第二曲柄齿轮固定设置于所述第六转动轴上,且所述电机齿轮与所述一级减速大齿轮位于同一平面上,所述二级减速小齿轮、所述第一曲柄齿轮与所述第二曲柄齿轮位于同一平面上,所述电机齿轮与所述一级减速大齿轮相啮合,所述二级减速小齿轮与所述第二曲柄齿轮相啮合,所述第二曲柄齿轮与所述第一曲柄齿轮相啮合,所述第二曲柄齿轮与所述第一曲柄齿轮的齿轮模数、齿数相同,所述第二曲柄齿轮远离所述机架的一侧面上设置有第八孔柱体,所述第八孔柱体上设置有第八安装孔,所述第八转动轴的一端固定设置于所述第八安装孔内,所述第一曲柄齿轮远离所述机架的一侧面上设置有第九孔柱体,所述第九孔柱体上设置有第九安装孔,所述第七转动轴的一端固定设置于所述第九安装孔内,所述第九转动轴固定设置于所述第一安装孔内,所述第十转动轴固定设置于所述第二安装孔内,所述第四摆杆的第一端与所述第九转动轴转动连接,所述第五摆杆的第一端与所述第十转动轴转动连接,两组所述机翼机构的所述第一舵机分别设置于所述第四摆杆的第二端和所述第五摆杆的第二端上,所述第一曲柄的第一端与所述第七转动轴转动连接,所述第一曲柄的第二端通过所述第十一转动轴与所述第四摆杆的中部转动连接,所述第二曲柄的第一端与所述第八转动轴转动连接,所述第二曲柄的第二端通过所述第十二转动轴与所述第五摆杆的中部转动连接,所述第二曲柄齿轮与所述第一曲柄齿轮、所述第四摆杆与所述第五摆杆、所述第一曲柄与所述第二曲柄均分别沿所述电机齿轮和所述一级减速大齿轮的中心连线对称设置;
9、其中,所述第三方向、所述第一方向和所述第二方向两两相互垂直。
10、在本技术的一些实施例中,所述机架还包括多个辅助支撑架,所述辅助支撑架为圆弧板结构,多个所述辅助支撑架等距离均匀设置于所述第四孔柱体远离所述第二支撑架的侧面边缘,且多个所述辅助支撑架围设于所述空心杯电机的外侧表面上。
11、在本技术的一些实施例中,所述第四摆杆包括第一连杆、第一安装架和第十孔柱体,所述第一安装架为u形架结构,其中一个所述第一舵机安装于所述第一安装架内,所述第一连杆沿所述第三方向延伸设置,且所述第一连杆的一端与所述第九转动轴转动连接,所述第一连杆的另一端与所述第一安装架一体连接,所述第十孔柱体设置于所述第一连杆远离所述第一曲柄的一侧中部,所述第十孔柱体沿所述第一方向延伸设置,且所述第十孔柱体上设置有贯穿所述第一连杆的第十安装孔,所述第十一转动轴的一端转动设置于所述第十安装孔内;
12、所述第五摆杆包括第二连杆、第二安装架和第十一孔柱体,所述第二安装架为u形架结构,另一个所述第一舵机安装于所述第二安装架内,所述第二连杆沿所述第三方向延伸设置,且所述第二连杆的一端与所述第十转动轴转动连接,所述第二连杆的另一端与所述第二安装架一体连接,所述第十一孔柱体设置于所述第二连杆远离所述第二曲柄的一侧中部,所述第十一孔柱体沿所述第一方向延伸设置,且所述第十一孔柱体上设置有贯穿所述第二连杆的第十一安装孔,所述第十二转动轴的一端转动设置于所述第十一安装孔内。
13、在本技术的一些实施例中,所述第一支撑架为圆形板结构,所述第二支撑架为四边形板结构,所述第二支撑架的一角与所述第一支撑架相连,且所述第一支撑架和所述第二支撑架一体成型,所述第一支撑架和所述第二支撑架上均设置有若干个减重缺口。
14、在本技术的一些实施例中,所述电机齿轮、所述第一曲柄齿轮、所述第二曲柄齿轮、所述一级减速大齿轮以及所述二级减速小齿轮均为直齿轮,且齿轮模数均为0.5,所述电机齿轮的齿轮齿数为8,所述一级减速大齿轮的齿轮齿数为48,所述二级减速小齿轮的齿轮齿数为9,所述第一曲柄齿轮和所述第二曲柄齿轮的齿轮齿数均为48。
15、在本技术的一些实施例中,所述第一摆杆包括一体成型的连接杆、固定支架以及连接支架,所述连接杆的第一端为圆柱体结构,所述连接杆的第一端设置有第十二安装孔,所述第一舵机的转动轴固定设置于所述第十二安装孔内,所述固定支架为l形支架结构,所述第二舵机设置于所述固定支架上,所述连接杆的第二端、所述连接支架的第一端分别与所述固定支架的相对两侧相连,且所述固定支架位于所述连接杆和所述连接支架之间的端面设置有凹槽,所述第二舵机的所述摇臂设置于所述凹槽内,所述连接支架的第二端设置有两个安装耳,两个所述安装耳对称设置,且两个所述安装耳上均分别设置有第十三安装孔,所述第三转动轴的两端分别设置于两个所述第十三安装孔内,所述第三摆杆的第一端套设于所述第三转动轴内,且位于两个所述安装耳之间。
16、在本技术的一些实施例中,所述第二摆杆和所述第三摆杆的两端分别为圆形板结构,且所述第二摆杆和所述第三摆杆的宽度小于两端圆直径。
17、在本技术的一些实施例中,所述尾翼包括升降舵、方向舵、水平尾翼、垂直尾翼、第三舵机、第四舵机、第一尾翼拉杆和第二尾翼拉杆,所述垂直尾翼与所述机身杆的第二端胶合固定,所述方向舵通过合页与所述垂直尾翼远离所述机身杆的一端活动连接,所述水平尾翼设置于所述垂直尾翼上,所述升降舵通过合页与所述水平尾翼远离所述机身杆的一端活动连接,且所述第三舵机和所述第四舵机设置于所述垂直尾翼连接所述机身杆的一端,所述第一尾翼拉杆的一端与所述第三舵机的摇臂固定连接,所述第一尾翼拉杆的另一端与所述方向舵固定连接,所述第二尾翼拉杆的一端与所述第四舵机的摇臂固定连接,所述第二尾翼拉杆的另一端与所述升降舵固定连接。
18、本技术实施例的有益效果如下:
19、在飞行结束后可将机翼进行收拢折叠,减少了机翼暴露的面积,便于运输和储存,解决了现有技术中由于扑翼飞行机器人的机翼裸露于机身外侧而易损的问题。
- 还没有人留言评论。精彩留言会获得点赞!