一种高续航巡检无人机及方法与流程
本发明涉及无人机,具体是一种高续航巡检无人机及方法。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,主要由无人机本体(机身、机翼、螺旋桨、起落架、载物结构等)、动力系统、飞行控制系统、信息采集系统、地面控制系统等组成,从技术角度分为无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等多种类型,具有重量轻、体积小、成本低、使用方便、应用环境要求低等诸多特点,在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、环境巡检、救灾、影视拍摄等等领域的应用均已十分成熟。
2、在现有技术中,无人机的续航问题一直是其发展的重点关注问题之一,在特殊应用中,如森林防火巡检、电力巡检、特殊区域巡检等应用中,由于无人机飞行距离远、面积和跨度大,对于无人机的高续航提出了更高要求,一般而言,在解决续航问题时,一般采用以下两种方式进行:1、安装光伏结构。即在无人机本体外侧对应位置,如机翼、机身上安装或镶嵌光伏板,利用太阳能充电获取电能以提高续航动力源,但这种方式不仅会影响到无人机本身的飞行结构,影响其飞机结构设计的稳定性和安全性,同时光伏板暴露在外,容易损坏脱落,需要定期维护更换,成本也较高,并且,采用此方式普遍无法使用大功率的光伏充电系统,充电速度慢、容量小,无法提供更多的续航电力,而且需要另外加装光伏充电系统和单独的充电蓄电池,无疑需要更改飞机结构,并增加飞机设计成本和重量,使得无人机设计和制造成本增加。2、加装蓄电池或增加蓄电池容量。即在无人机上加装多组蓄电池或者增加单个蓄电池的容量,进而获取更高的续航能力,但此方式无能那种方式,都需要增加飞机结构设计容量,导致飞机体积的增大,同时也会增加蓄电池的重量,导致飞机自身重量上升,能耗增大,得不偿失,且采用此方式的无人机同样需要在电力低至阈值后回到充电基站充电,如此来回充电不仅麻烦,且极为耗时,对于大面积、长时长的巡检任务,同样无法很好的适应。
3、基于此,如何设计一种结构简单、设计合理及成本低的高续航无人机,是我们急需解决的技术问题。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种高续航巡检无人机,该高续航巡检无人机具有结构简单、设计合理、成本低及续航高的技术特点。
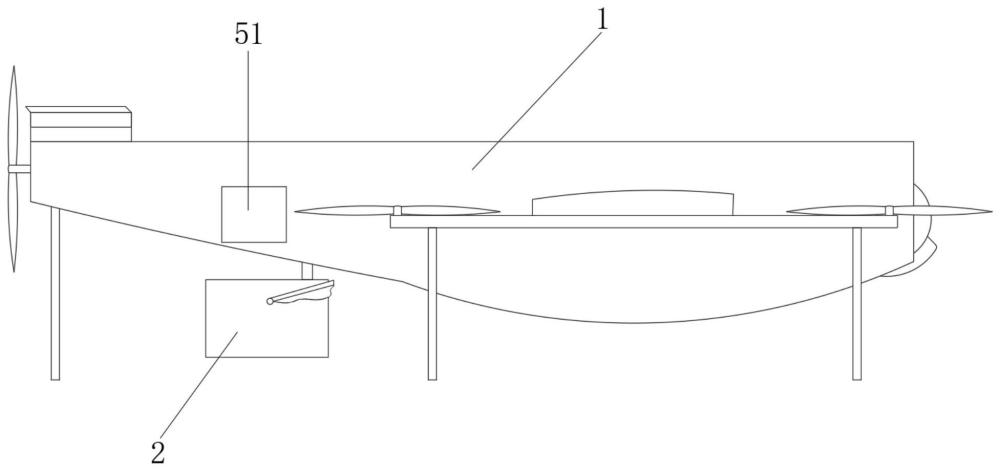
2、本发明的目的主要通过以下技术方案实现:一种高续航巡检无人机,包括无人机本体,所述无人机本体连接有可分离的供充电系统,供充电系统用于对无人机本体进行供电或在与无人机本体分离后进行光伏充电;所述供充电系统包括箱体,箱体内设置有蓄电池、控制系统及可延展至箱体外的柔性薄膜光伏板组件,所述控制系统均与所述蓄电池和柔性薄膜光伏板组件电性连接;所述无人机本体上还设置有可开闭的蓄电池安装腔,蓄电池安装腔内安装有可伸出至无人机本体外的蓄电池定位安装组件,所述箱体内还设置有蓄电池搬运组件,蓄电池搬运组件用于抓取蓄电池并将其搬运至蓄电池定位安装组件上或抓取蓄电池定位安装组件上的蓄电池并将其搬运回蓄电池安装腔内;所述箱体上设置有至少一个第一定位装置,第一定位装置与所述控制系统电性连接,所述无人机本体上设置有至少一个第二定位装置,所述第一定位装置和第二定位装置用于数据交互以确定箱体与无人机本体的相对位置。
3、基于以上技术方案,所述箱体上部设置有蓄电池供应腔,蓄电池供应腔上部开口并设置有可开闭蓄电池供应腔的盖板;所述蓄电池供应腔底部安装有蓄电池定位底座,所述蓄电池安装腔侧壁还设置有与控制系统电性连接的第一弹性触头,所述蓄电池安装于蓄电池定位底座上并可与第一弹性触头电性连接;所述蓄电池搬运组件设置于蓄电池供应腔内并与所述蓄电池定位底座间隔设置;所述蓄电池供应腔间隔设置有多个。
4、基于以上技术方案,所述蓄电池搬运组件包括转动电机、连接于转动电机输出端的电动伸缩杆、连接于电动伸缩杆上的电动夹爪,电动夹爪的两个夹爪分别位于蓄电池两侧。
5、基于以上技术方案,所述箱体上部还设置有配对孔,配对孔侧壁相对设置有两个卡孔,卡孔内依次设置有电磁铁、弹簧及导磁滑块,导磁滑块可在电磁铁和弹簧作用下沿卡孔移动,所述导磁滑块朝向卡孔外的一侧还连接有卡板;所述无人机本体上还连接有可旋转升降的连接杆,连接杆下端侧壁相对设置有两个缺口,两个所述缺口下端均形成有卡槽,所述卡板可通过缺口并卡入至卡槽内;两个所述卡孔内的电磁铁均与控制系统电性连接。
6、基于以上技术方案,所述配对孔底部还设置有第二弹性触头,第二弹性触头与所述控制系统电性连接;所述连接杆底部还设置有第三弹性触头,当所述连接杆连接于配对孔内后,所述第二弹性触头和第三弹性触头相互抵接;所述第三弹性触头与所述无人机本体内的飞行控制系统电性连接。
7、基于以上技术方案,所述箱体底部还设置有光伏组件安装腔,光伏组件安装腔一侧的箱体设置有开闭光伏组件安装腔的活动门;所述柔性薄膜光伏板组件安装于所述光伏组件安装腔内;所述柔性薄膜光伏板组件包括自动卷绕筒、柔性薄膜光伏板及组合电动推杆,所述柔性薄膜光伏板卷绕在自动卷绕筒内,所述组合电动推杆的伸缩端连接有拉杆,所述柔性薄膜光伏板的一端固定于拉杆上,所述组合电动推杆可伸展以拉动柔性薄膜光伏板并推开活动门以将柔性薄膜光伏板伸出至箱体外或可回缩以拉动柔性薄膜光伏板回到箱体内。
8、基于以上技术方案,所述箱体外还设置有活动保护罩;所述活动保护罩包括u形架、驱动电机及柔性隔热防水布,所述u形架两端转动连接于箱体相对两侧,所述驱动电机设置于箱体内且其输出端与所述u形架的一端固定连接以驱动u形架转动,所述柔性隔热防水布一端固定于箱体一侧,所述柔性隔热防水布的另一端则固定于u形架上以随u形架转动而遮挡箱体上部或者解除遮挡。
9、基于以上技术方案,所述蓄电池安装腔内相对设置有两个限位滑板及位于两个限位滑板之间的第四弹性触头,所述第四弹性触头与所述无人机本体内的动力系统电性连接;所述蓄电池定位安装组件设置于两个限位滑板和第四弹性触头之间;所述蓄电池定位安装组件包括配对板,配对板上端内凹形成有蓄电池安装槽,蓄电池安装槽的侧壁为倾斜设置的扩口结构,所述蓄电池安装槽的底部中间位置设置有通风网格,所述通风网格周围呈放射状设置有多个与通风网格连通的风槽,所述配对板内部设置有散热风机,散热风机的出风口位于通风网格内部,所述配对板相对两侧还设置有与限位滑板配对的滑槽;所述蓄电池定位安装组件还包括固定于蓄电池安装腔内的电动推杆,电动推杆的伸缩端固定于配对板下方以将配对板推出或拉回至无人机本体,所述电动推杆与所述无人机本体内的动力系统电性连接。
10、综上所述,本发明的有益效果如下:本发明通过设计可分离的供充电系统,不仅可利用供充电系统进行供电进行飞行动力源,同时供充电系统还可以分离至相应区域进行自行光伏充电,在无人机需要时再飞回进行装配后供电或者直接装配使用供充电系统的蓄电池进行供电,进而脱离了无人机需要飞回充电基站续航的问题,可以实现在特定区域内的连续飞行作业,具有续航能力高、续航方便的特点,适于野外大面积、长时长的巡检作业。
11、同时,本发明还基于以上高续航巡检无人机,提供了一种高续航巡检方法,包括以下步骤:
12、s1
13、将巡检区域划分为若干分区,并确保所有分区均与巡检区域的几何中心或中心点相互重叠,并以几何中心或中心点所在坐标为续航点;
14、s2
15、无人机以供充电系统作为动力源飞行降落至续航点,并将供充电系统分离后,即采用自身动力系统按照巡检指令对对应分区进行巡检;
16、s3
17、当供充电系统分离后,控制系统控制柔性薄膜光伏板组件,使得其内柔性薄膜光伏板伸出至箱体外对蓄电池进行供电;
18、s4
19、当无人机自身动力系统电力降低至阈值后,即飞行至续航点,此时基于第一定位装置和第二定位装置数据交互实现无人机与供充电系统定位,定位完成后,蓄电池定位安装组件伸出至蓄电池安装腔,同时控制系统启动蓄电池搬运组件,驱动其将充电完成后的蓄电池送至蓄电池安装腔外并位于蓄电池定位安装组件上方预定距离,此时蓄电池搬运组件的电动夹爪解除夹持,蓄电池进入至蓄电池定位安装组件的蓄电池安装槽内并定位,蓄电池定位安装组件退回至蓄电池安装腔内并与第四弹性触头接触以作为动力源驱动无人机飞行;
20、s5
21、当步骤s4完成后,无人机以安装的蓄电池作为动力源继续执行巡检任务,此时控制系统启动蓄电池搬运组件回归至原位,继续执行充电作业;
22、s6
23、当无人机巡检至蓄电池电力降低至阈值后,即重新飞行至续航点并与供充电系统定位降落后,蓄电池定位安装组件伸出至蓄电池安装腔,控制系统启动蓄电池搬运组件,驱动其将蓄电池定位安装组件上蓄电池夹持后送回至对应的蓄电池供应腔,再控制其余蓄电池供应腔内蓄电池搬运组件执行蓄电池安装工作,完成后蓄电池搬运组件回归原位,无人机继续执行巡检任务;
24、s7
25、重复步骤s6直至所有分区均完成巡检任务,无人机飞行至续航点并与供充电系统定位后,连接杆下降直至与配对孔配对,当卡板与卡槽配对后,控制系统控制柔性薄膜光伏板组件使柔性薄膜光伏板回缩至箱体,无人机即可通过第二弹性触头和第三弹性触头相互抵接获取供充电系统内蓄电池电力作为动力源,飞行至预设返航地点。
26、在该高续航巡检方法中,当执行步骤s4和/或步骤s6时,若不同蓄电池供应腔内蓄电池无法与蓄电池定位安装组件位置匹配时,所述无人机可启动连接杆下降直至与配对孔配对,并通过连接杆转动箱体,并基于第一定位装置和第二定位装置数据交互将箱体转动至合适位置,使得对应的蓄电池在蓄电池搬运组件夹持下可移动至蓄电池定位安装组件的安装位以完成安装。
27、本发明的高续航巡检方法,基于将巡检区域进行合理划分以及将供充电系统放置于合适位置,使得无人机可以在该巡检区域进行长时间的巡检作业,可以在较短距离前提下实现供电所需,极大的节省了飞机返航蓄电的耗时和耗能,同时也无需多余增加飞机结构,降低了飞机载重,具有很高的实用价值和应用前景。
- 还没有人留言评论。精彩留言会获得点赞!