一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法
本发明属于宇宙飞行器部件,提供了一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法。
背景技术:
1、近年来,具备研制成本低、研发周期短等优点的微小卫星技术受到了重点关注与研究。空间盘绕式伸展臂是一种空间可展开结构,具有压缩比大,比质量小,展开收拢方式灵活等优点,在卫星入轨前收拢在有限的空间内,卫星入轨后展开为预定的空间构型,很适合应用到星上资源有限的微小卫星平台上以扩展其功能,应用前景广阔。其中一种典型应用方式是在空间望远镜领域的应用,望远镜镜头可安装于盘绕式伸展臂的顶部,位于焦点的探测器则位于卫星本体(或卫星平台)上,盘绕式伸展臂展开后可使得望远镜焦距远大于卫星本体(或航天器)尺寸,进而大幅度提升观测性能。而以空间望远镜为代表的科学载荷往往具有高精度指向的要求,盘绕式伸展臂作为柔性展开机构,自身刚度相对较低,在空间高低温环境下容易产生变形,仅靠自身展开精度往往难以满足要求,需要具备位姿调整能力。
2、在进行位姿调整之前,通常需要进行位姿测量。位姿测量的方法中,激光测量精度最高,但要求解全部六自由度位姿成本高、所需设备条件复杂,往往需要多个激光发生装置、反射镜等设备的协同配合,且由于盘绕式伸展臂展开后发生的变形可能导致激光点脱靶,脱离位置敏感探测器的激光点信号接收范围导致纯激光测量指导位姿调整适应度较差。视觉测量硬件要求较低,视野范围广,六自由度位姿解算算法相对成熟,但精度相对较低,难以完全依靠其测量结果指导位姿调整来满足精密光学设备对于焦距以及光轴在焦平面的落点位置的严格要求。
3、因此,需要设计一种精度足够、所需设备相对简单的盘绕式伸展臂位姿调整方法,使其能够满足空间相机光学成像要求。
技术实现思路
1、本发明实施例的目的在于提供一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法,以解决上述背景技术提到的问题。
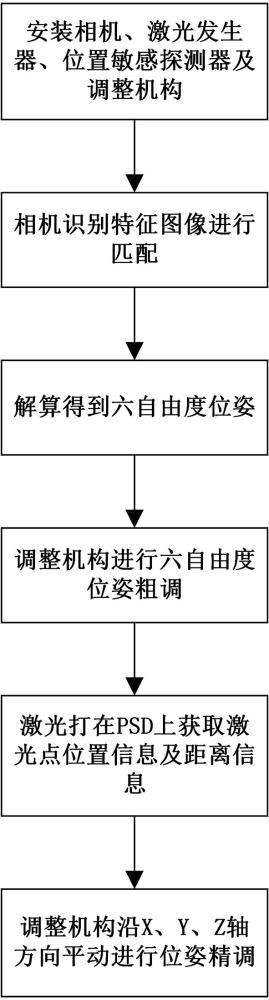
2、本发明实施例是这样实现的,一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法,包括以下步骤:
3、对已配置好的位姿调整装置进行初始化,该位姿调整装置包括双目相机、激光发生器、位置敏感探测器和调整机构;
4、根据双目相机进行特征识别匹配的结果解算出盘绕式伸展臂的当前位姿,得到盘绕式伸展臂的位姿偏移值;
5、根据所述位姿偏移值控制调整机构进行盘绕式伸展臂位姿的初步调整,使盘绕式伸展臂位姿回到第二位姿状态,该第二位姿状态趋近于盘绕式伸展臂的初始位姿状态,同时,使激光发生器回到位置敏感探测器的探测区域内;
6、获取位置敏感探测器识别激光发生器产生的激光点而得到的该激光点的二维位置坐标及距离,解算得粗调后盘绕式伸展臂的平动偏移值;
7、根据得到的平动偏移值,控制调整机构进行盘绕式伸展臂位姿的调整,完成精调。
8、进一步地,在对已配置好的位姿调整装置进行初始化的步骤前,所述方法还包括:
9、配置位姿调整装置;具体包含有:
10、将激光发生器安装在盘绕式伸展臂顶盘底部且与顶盘平面垂直;
11、将位置敏感探测器安装在激光发生器下方的卫星平台表面,位置敏感探测器的中心在激光发生器的激光光路上;
12、在盘绕式伸展臂顶盘另一侧的底部设置特征图像,并在特征图像下方的卫星平台上安装双目相机;
13、在盘绕式伸展臂底部安装调整机构,该调整机构具有六个调整自由度。
14、进一步地,所述对已配置好的位姿调整装置进行初始化的步骤,至少包括:
15、基于已配置好的位姿调整装置,标定双目相机的相机参数;相机参数包含相机内参、外参以及畸变系数。
16、进一步地,所述在盘绕式伸展臂顶盘另一侧的底部设置特征图像,包括:
17、在盘绕式伸展臂顶盘另一侧的底部喷涂特征图像;
18、或者,在盘绕式伸展臂顶盘另一侧的底部粘贴特征图像;
19、或者,在盘绕式伸展臂顶盘另一侧的底部雕刻特征图像,其中的特征图像为黑白相间的矩阵图像。
20、进一步地,其中所述激光发生器被配置为单束激光发生装置。
21、进一步地,位姿调整装置还包括控制系统,控制系统控制与其电性连接的双目相机、激光发生器、位置敏感探测器和调整机构;
22、所述位置敏感探测器的探测区域的长宽不小于调整机构对应的调整行程,以减少脱靶概率。
23、进一步地,该方法应用于含有盘绕式伸展臂的微小卫星。
24、本发明实施例提供的一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法,微小卫星上的姿态调整装置,预先已经设置好,该位姿调整装置包括双目相机、激光发生器、位置敏感探测器和调整机构,调整机构具有六个调整自由度;能够通过双目相机与激光发生器、位置敏感探测器的单束激光相配合的方式完成盘绕式伸展臂位姿的粗调与精调,使其满足空间望远镜的高精度特定要求位姿;同时在此基础上,所采用的单束激光探测,相比现有的技术,无需求解全部六自由度位姿,成本低、所需设备条件相对简单,也不需要多个激光发生装置、反射镜等设备的协同配合;因此,该方法既可以弥补视觉测量结果指导调整关键位姿精度不足的缺陷,又可以避免激光高精测量脱靶的不利影响且简化激光部件所用设备,使完成空间望远镜特定要求的空间盘绕式伸展臂位姿调整更为精确与可靠。
技术特征:
1.一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在对已配置好的位姿调整装置进行初始化的步骤前,所述方法还包括:
3.根据权利要求1或2所述的方法,其特征在于,所述对已配置好的位姿调整装置进行初始化的步骤,至少包括:
4.根据权利要求2所述的方法,其特征在于,所述在盘绕式伸展臂顶盘另一侧的底部设置特征图像,包括:
5.根据权利要求1所述的方法,其特征在于,其中所述激光发生器被配置为单束激光发生装置。
6.根据权利要求1所述的方法,其特征在于,位姿调整装置还包括控制系统,控制系统控制与其电性连接的双目相机、激光发生器、位置敏感探测器和调整机构。
7.根据权利要求1所述的方法,其特征在于,该方法应用于含有盘绕式伸展臂的微小卫星。
技术总结
本发明适用于宇宙飞行器部件技术领域,提供了一种空间盘绕式伸展臂粗调与精调相结合的位姿调整方法,所述方法包括:对已配置好的位姿调整装置进行初始化,根据双目相机进行特征识别匹配的结果解算出盘绕式伸展臂的当前位姿,得到盘绕式伸展臂的位姿偏移值;根据所述位姿偏移值控制调整机构进行盘绕式伸展臂位姿的初步调整,使盘绕式伸展臂位姿回到第二位姿状态,该第二位姿状态趋近于盘绕式伸展臂的初始位姿状态,同时,使激光发生器回到位置敏感探测器的探测区域内;本发明既可以弥补视觉测量结果指导调整关键位姿精度不足的缺陷,又可以避免激光高精测量脱靶的不利影响,使完成空间望远镜特定要求的位姿调整更为精确与可靠。
技术研发人员:孙亮,刘家豪,赵旭瑞,赵泽林,刘宇,黄海,赵国伟
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!