平口袋封口机的制作方法
[0001]
本发明涉及一种平口袋封口机,主要用于食品包装袋的封口,属于食品包装机械技术领域。
背景技术:
[0002]
目前市场上的挂面平口袋封口,完全依靠人工操作。速度慢的同时,封口效果也会由于工人技能水准的不同而参差不齐。包装效果差,速度慢,制约着挂面包装自动化的推进。
技术实现要素:
[0003]
本发明提供一种平口袋封口机,以解决现有技术存在的上述问题。
[0004]
本发明的技术方案是:一种平口袋封口机,包括架体,其特征在于,在所述的架体上装有托面升降部分、高度检测部分、卷口部分和胶带机部分,托面升降部分安装在架体的下部,用于实现挂面平口袋的升降功能;高度检测部分安装在托面升降部分的侧上方,用于实现挂面高度检测的功能;卷口部分安装在托面升降部分的正上方,用于实现袋口折叠的功能;胶带机部分安装在卷口部分的正上方,用于实现袋口的贴胶带封口功能。
[0005]
本发明的优点是:能够实现自动化封口,解放劳动力;提高了包装的一致性;胶带封口紧度高,保证了运输过程的安全性。
附图说明
[0006]
图1是本发明整体的正面结构示意图;图2是图1的左视图;图3是图1中托面升降部分的结构示意图;图4是图3的左视图;图5是图3的俯视图;图6是图1中高度检测部分3的结构示意图;图7是图1中卷口部分4的结构示意图;图8是图7的左视图;图9是图7中夹袋杆并拢状态的俯视图;图10是图7中夹袋杆张开状态的俯视图;图11是图1中胶带机部分的结构示意图;图12是图11的左视图;图13是图11中p处的放大图;图14是本发明胶带机部分第一动作(胶带下行,贴上)的结构示意图;图15是本发明胶带机部分第二动作(胶带上行,拉出第一边)的结构示意图;图16是本发明胶带机部分第三动作(胶带平移,拉出顶边)的结构示意图;
图17是本发明胶带机部分第四动作(胶带下行,贴第三边,切断)的结构示意图;图18是加工产品在设备中的对应位置;图19是图18的左视图;图20是产品输出时的一个状态图。
具体实施方式
[0007]
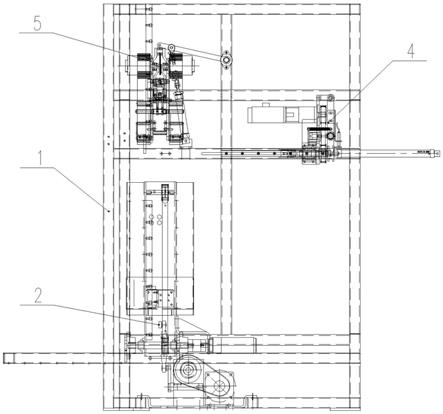
参见图1和图2,本发明一种平口袋封口机,包括架体1和安装在该架体1上的托面升降部分2、高度检测部分3、卷口部分4和胶带机部分5,托面升降部分2安装在架体1的下部;高度检测部分3安装在托面升降部分2的侧上方;卷口部分4安装在托面升降部分2的正上方;胶带机部分5安装在卷口部分4的正上方。其中托面升降部分2用于实现挂面平口袋的升降功能,解决随卷口过程中,平口袋随卷口而不断上升问题;高度检测部分3的用于实现挂面高度检测的功能,解决卷口开始时,平口袋动位置合适不合适的问题;卷口部分4用于实现袋口折叠的功能,解决袋口折叠一致性的问题;胶带机部分5用于实现袋口的贴胶带封口功能,解决胶带封口后袋口的松紧问题。
[0008]
可在架体1的底部安装地脚,使用时安置于地面上,布局位置位于挂面平口袋装袋设备的物料输出口后方位置(托面板2-6与挂面装袋机的输出口对应,平口袋装袋机将平口袋挂面推出的时候直接将挂面推倒托面板2-6上)。
[0009]
参见图3-图5,托面升降部分2包括:托面升降安装架2-1、挡面侧板2-2、托面升降导轨2-3、托面升降滑块2-4、托面板安装架2-5、托面板2-6、同步带从动轴2-7、同步带从动轮2-8、同步带2-9、带座轴承2-10、同步带主动轴2-11、同步带主动轮2-12、联轴器2-13、托面升降伺服电机2-14、电机安装座2-15、翻面摆臂2-16、涡轮蜗杆减速机2-17、翻面电机安装板2-18、翻面电机2-19、连杆2-20、同步带主动轮2-21、同步带从动轮2-22、同步带2-23、翻面座板2-24和带座轴承2-25。
[0010]
托面升降安装架2-1安装固定在带座轴承2-25的座上,带座轴承2-25的内圈安装在2-11同步带主动轴上,同步带主动轴2-11通过带座轴承2-10安装在架体1上;同步带主动轴2-11可以实现转动。同步带主动轴2-11的一端通过联轴器2-13与托面升降伺服电机2-14的输出轴连接。托面升降伺服电机2-14的机体安装固定在电机安装座2-15上,电机安装座2-15的一端安装固定在托面升降安装架2-1上。同步带主动轮2-12安装固定在同步带主动轴2-11上,同步带从动轮2-8通过轴承安装在同步带从动轴2-7上,同步带从动轮2-8可以实现转动。同步带从动轴2-7安装固定在托面升降安装架2-1上。同步带2-9环绕在同步带从动轮2-8与同步带主动轮2-12之间。托面板2-6安装固定在托面板安装架2-5上,托面板安装架2-5安装在托面升降滑块2-4上,托面升降滑块2-4安装在托面升降导轨2-3上,可以沿其滑动。托面升降导轨2-3安装固定在托面升降安装架2-1上,挡面侧板2-2安装固定在托面升降安装架2-1的两侧。托面板安装架2-5通过锁紧块与同步带2-9相连。
[0011]
参见图6,本发明的高度检测部分3包括:检测安装板3-1、调节手臂安装板3-2、连杆3-3、鱼眼接头3-4、调节手臂3-5、螺杆3-6、塑料手柄3-7、接近开关调节板3-8、检测杆座3-9、拉簧3-10、让位气缸3-11、接近开关3-12。
[0012]
检测安装板3-1、调节手臂安装板3-2均安装在架体1上的对应位置。调节手臂3-5通过螺钉铰接在调节手臂安装板3-2上,通过螺杆3-6将调节手臂3-5和塑料手柄3-7连接到
一起。接近开关调节板3-8、检测杆座3-9通过轴承铰接在检测安装板3-1的同一位置,可以绕同一中心转动。让位气缸3-11的尾端铰接在检测安装板3-1上,让位气缸3-11的活塞杆通过鱼眼接头3-4与检测杆座3-9连接。调节手臂3-5的一端与接近开关调节板3-8的一端通过连杆3-3相互连接;在该检测杆座3-9与该让位气缸3-11的尾端之间连接有拉簧3-10。
[0013]
参见图7-图10,所述的卷口部分4 包括:卷口部分安装座4-1、进退滑块4-2、卷口同步带从动轮4-3、进退导轨4-4、夹袋摆座4-5、夹袋摆臂4-6、夹袋气缸4-7、卷口回转座4-8、卷口伺服电机4-9、卷口同步带主动轮4-10、轴承4-11、拉簧4-12、卷口同步带4-13、夹袋摆杆4-14、夹袋连接块4-15、夹袋气缸安装板4-16、回转轴承4-17、夹袋杆4-18、夹袋杆安装座4-19、回转轴承安装座4-20。
[0014]
卷口部分安装座4-1与进退滑块4-2固定在一起,进退滑块4-2安装在进退导轨4-4上,进退导轨4-4安装固定在架体1的对应位置上。夹袋摆座4-5用螺钉固定在卷口部分安装座4-1上,夹袋摆臂4-6与夹袋摆座4-5铰接在一起,轴承4-11固定在夹袋摆臂4-6上。卷口伺服电机4-9安装固定在卷口部分安装座4-1上,卷口同步带主动轮4-10安装固定在卷口伺服电机4-9的输出轴上。夹袋气缸安装板4-16通过螺钉安装固定在卷口部分安装座4-1上,夹袋气缸4-7的缸体安装固定在夹袋气缸安装板4-16上,夹袋气缸4-7前端的活塞杆顶在轴承4-11上。拉簧4-12的一端固定在夹袋摆臂4-6上,另一端固定在夹袋气缸安装板4-16上。回转轴承座4-20安装固定在卷口部分安装座4-1上,其内部安装回转轴承4-17的外圈。回转轴承4-17的内圈安装有卷口回转座4-8。夹袋摆杆4-14穿过卷口回转座4-8的内孔,夹袋摆杆4-14的前端与夹袋杆安装座4-19铰链,后端与夹袋连接块4-15螺纹连接。夹袋杆4-18安装固定在夹袋杆安装座4-19上。卷口同步带从动轮4-3转动安装在卷口回转座4-8上,卷口同步带4-13安装在卷口同步带主动轮4-10与卷口同步带从动轮4-3之间。夹袋摆臂4-6的下端通过滚针轴承卡在夹袋连接块4-15的槽内。
[0015]
参见图11-图13,所述的胶带机部分5包括:带座轴承5-1、升降摆臂5-2、升降气缸5-3、升降气缸尾座5-4、升降导轨5-5、升降滑块5-6、横移导轨锁块5-7、横移导轨5-8、横移滑块5-9、横移气缸5-10、横移气缸尾座5-11、胶带机安装座5-12、限位支架5-13、拉簧5-14、连接块5-15、摆臂5-16、a限位轴承5-17、调节连杆5-18、弹簧5-19、胶带安装座5-20、胶带5-21、b限位轴承5-22、胶带机主板5-23、c限位轴承5-24、切刀摆臂5-25、拉簧5-26、切刀安装座5-27、切刀5-28、橡胶压辊5-29、切刀摆臂5-30、胶带压辊5-31、a限位板安装架5-32、a限位板5-33、b限位板5-34、b限位板安装架5-35、c限位板5-36、轴承5-37和部件5-38。
[0016]
两根相互平行的升降导轨5-5竖向固定在架体1上,横移导轨5-8的两端各通过一个横移导轨锁块5-7分别滑动安装在两根升降导轨5-5上;带座轴承5-1安装固定在架体1上,升降摆臂5-2安装在带座轴承5-1的内圈上;升降气缸尾座5-4安装固定在架体1的对应位置上,升降气缸5-3的缸体固定在升降气缸尾座5-4上,升降气缸5-3的活塞杆通过鱼眼接头与升降摆臂5-2铰接;升降摆臂5-2的前端通过螺杆与鱼眼接头与横移导轨锁块5-7相连接;横移导轨锁块5-7安装固定在升降滑块5-6上,并紧固在横移导轨5-8的两端;横移滑块5-9滑动安装在横移导轨5-8上,胶带机安装座5-12的靠近一端处固定在横移滑块5-9上,在该胶带机安装座5-12与该横移滑块5-9相邻的一端铰接有胶带机主板5-23的下部,在该胶带机安装座5-12的另一端固定有限位支架5-13;在该胶带机安装座5-12的中部铰接摆臂5-16的下端,在该摆臂5-16的上端装有a限位轴承5-17,该摆臂5-16的中部与连接块5-15铰
接,该连接块5-15与调节连杆5-18的一端连接,该调节连杆5-18的另一端(即图13中的右端)与固定块5-41连接,固定块5-41铰接在胶带机主板5-23上,固定块5-41中间有个通孔,调节连杆5-18穿过固定块5-41的通孔;在该调节连杆5-18上装有弹簧5-19;横移气缸尾座5-11安装固定在5-8横移导轨的一端,横移气缸5-10的两端分别与横移气缸尾座5-11和胶带机主板5-23的靠近下端处铰接;在该胶带机主板5-23的顶端装有b限位轴承5-22;在该胶带机主板5-23的靠近下端处铰接l形的切刀摆臂5-25的支点,在该切刀摆臂5-25的上端装有c限位轴承5-24,该切刀摆臂5-25的下端与切刀安装座5-27的顶端铰接,在该切刀安装座5-27的底端连接切刀5-28;在该切刀摆臂5-25的下部与该胶带机主板5-23的下部之间连接有拉簧5-26;在该胶带机主板5-23的底端铰接胶带压辊安装板5-38,在胶带压辊安装板5-38的顶端和拐角处分别装有胶带压辊5-31和橡胶压辊5-29;在胶带压辊安装板5-38的上部与该切刀安装座5-27的下部之间铰接有切刀摆臂5-30;在一根所述的升降导轨5-5上通过轴承5-37安装三角形的c限位板5-36的第一角,该c限位板5-36下端的第二角与该连接块5-15连接,该c限位板5-36第二角与第三角之间的边的上部与所述的a限位轴承5-17相对应;在该c限位板5-36第一角与第二角之间的边上装有限位柱5-361(可采用内六角圆柱头螺钉,在c限位板5-36自然下垂的时候,c限位板5-36绕轴承5-37转动,限位柱5-361撞到升降导轨5-5,起到了一个限位的作用);在另一升降导轨5-5的上部通过两个b限位板安装架5-35安装一b限位板5-34;在同一侧的该升降导轨5-5的下端通过a限位板安装架5-32装有a限位板5-33。在所述的胶带机主板5-23固定安装胶带安装座5-20,该胶带安装座5-20用于安装胶带5-21。
[0017]
胶带机部分5的工作过程参见图14-图17:先在胶带机主板5-23上部的凸出部上装好胶带(辊)5-21。图11为系统初始状态,此时升降气缸5-3伸出,升降摇臂5-2在上限位置,通过升降连杆5-39将横移导轨5-8及安装在该横移导轨5-8上的所有零件提升到图11所示位置上限。物料(平口袋)6就位,胶带5-21处于图示准备状态。
[0018]
如图14所示,升降气缸5-3缩回过程中,拉动升降摇臂5-2运行到图示下限位置,此时横移导轨5-8及安装在其上的所有零件(以下称系统)随升降摇臂5-2下行。在系统下行过程中,摆臂5-16脱离c限位板5-36的限位范围,在拉簧5-14的拉动下,摆臂5-16绕铰接点逆时针摆动,带动摆臂5-16中部的螺纹十字套逆时针围绕摆臂5-16铰接点旋转,拉动调节连杆5-18并带动胶带机主板5-23绕铰接点逆时针摆动,带动胶带5-21贴在图示物料6的左侧,同时胶带压辊安装板5-38右下角的拐角滚轮b贴在了物料6的左侧。升降气缸5-3继续缩回至气缸完全缩回位置,此时因系统被升降气缸5-3带动下行,拐角滚轮b沿物料6左侧下行,将胶带5-21完全压实在物料6的左侧表面上。
[0019]
如图15所示,升降气缸5-3伸出,推动升降摇臂5-2运行到图示上限位置,通过升降连杆5-39将全系统零件提升到图示上限位置,此时因为胶带5-21已经贴在物料6左侧表面,在系统上行过程中,胶带5-21被拉出,当系统运行到图示位置时,胶带5-21被拉出呈图示状态,物料6左侧的胶带完成粘贴。
[0020]
如图16,升降气缸5-3保持伸出状态不变,横移气缸5-10伸出,推动胶带机安装座5-12沿横移导轨5-8在图示平面内向右平移,此时全系统被带动向右平移,拉动胶带5-21,当横移气缸5-10完全伸出到位时,胶带5-21被拉动到图示状态,完成对物料6上表面粘贴准备。
[0021]
图17所示,横移气缸5-10保持伸出状态不变,升降气缸5-3缩回,带动系统下行。在此过程中,胶带5-21贴在物料6上表面,完成对物料6上表面粘贴。系统下行过程中,弹簧5-19始终施加压力,使胶带机主板5-23始终压在b限位板5-34表面曲线上,在b限位板5-34约束下,胶带压辊安装板5-38左端的滚轮a把胶带5-21压实在物料6右侧表面上。在系统下行过程中,切刀摆臂5-25接触a限位板5-33,a限位板5-33表面曲线迫使切刀摆臂5-25逆时针摆动,带动切刀5-28完成胶带5-21的切断动作。当升降气缸5-3完全缩回时,所有动作完成。
[0022]
所有动作完成后,升降气缸5-3伸出,使全系统提升,升降气缸5-3到位后,横移气缸5-10缩回,带动全系统回到图11所示初始状态,准备对下一包物料粘胶带。
[0023]
本发明的总的工作过程为:在挂面完成平口袋的装袋后,被推至托面升降部分2的托面板2-6上,之后托面升降伺服电机2-14开始转动,带动同步带2-9开始转动。托面板安装架2-5与同步带2-9的某一处相连,同步带2-9带动托面板2-6上升,托面板2-6开始托着挂面平口袋(上游的平口袋装袋机将挂面装入平口袋后,袋口是打开的,然后本设备将袋口卷成型并用胶带黏住)开始上升(参见图18和图19)。在上升至预定位置后,最上面的装有挂面的平口袋6开始顶住检测杆座3-9上的检测杆,检测杆座3-9开始转动,直至接近开关3-12发出信号,挂面平口袋到达了预先设定好的位置。之后夹袋气缸4-7收回,拉簧4-12开始带动夹袋摆臂4-6摆动,推动夹袋摆杆4-14沿轴向运动,实现夹袋杆4-18打开(如图10所示)。然后夹带气缸4-7伸出,推动轴承4-11,带动夹袋摆臂4-6摆动,最后实现夹袋杆4-18的夹袋动作(如图9所示,两根夹袋杆4-18并拢)。完成夹袋后,卷口伺服电机4-9开始转动,通过卷口同步带4-13带动卷口回转座4-8转动,夹袋杆4-18夹住袋口转动,实现卷袋的动作。与此同时,托面升降伺服电机2-14开始转动,托面板2-6托住挂面平口袋开始缓慢上升,最终实现平口袋袋口的整体卷口。卷口伺服电机4-9的控制信号为力矩控制,卷口伺服电机4-9在不断收集卷袋过程的力矩大小,来不断将袋口卷紧。在完成卷口后,胶带机部分5开始工作,升降气缸5-3收缩,胶带机下降(升降气缸5-3的缸体是通过升降气缸尾座5-4固定在架体1上的,升降气缸5-3活塞的伸出与缩回,通过鱼眼接头5-40带动升降摆臂5-2的摆动,升降摆臂5-2的一端安装在5-1带座轴承的内圈中。升降摆臂5-2的另外一端通过升降连杆5-39带动胶带机5的升降),完成“c型封口”胶带5-21的第一侧粘胶带;然后升降气缸5-3伸出,横移气缸5-10伸出,最后升降气缸5-3再缩回,完成胶带5-21“c型封口”。完成封口后托面升降伺服电机2-14反转,通过同步带2-9带动托面板2-9下降,下降至设定高度后,2-19翻面电机开始转动,通过同步带2-23带动安装在涡轮蜗杆减速机2-17中的翻面摆臂2-16转动,翻面摆臂2-16与托面升降安装架2-1通过2-20连杆铰接一起,翻面摆臂2-16的转动通过连杆2-20传递给托面升降安装架2-1,托面升降安装架2-1开始绕2-11同步带主动轴转动,在转动90
°
即挂面平口袋6平置以后,升降伺服电机2-14正转,通过同步带2-9带动托面板2-9向左平移,将挂面平口袋6推出至下一工位(请参考图20)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1