一种基于无人驾驶的智能抓取分类压缩处理平台及其路径规划方法与流程
一种基于无人驾驶的智能抓取分类压缩处理平台及其路径规划方法
1.应用领域
2.本发明涉及机械装置领域,特别是一种基于无人驾驶的智能抓取分类压缩处理平台及其路径规划方法。
背景技术:
3.将垃圾进行按类分选后,便可以用各种不同的方法进行回收再利用。分选回收再利用应该是处理生活垃圾的最好方法。生活垃圾一般可分为四大类:可回收垃圾、厨余垃圾、有害垃圾和其他垃圾。目前常用的垃圾处理方法主要有综合利用、卫生填埋、焚烧和堆肥。可回收垃圾包括纸类、金属、塑料、玻璃等,通过综合处理回收利用,可以减少污染,节省资源。厨房垃圾包括剩菜剩饭、骨头、菜根菜叶等食品类废物,经生物技术就地处理堆肥,每吨可生产0.3吨有机肥料。有害垃圾包括废电池、废日光灯管、废水银温度计、过期药品等,这些垃圾需要特殊安全处理。很多不分类处理的垃圾还会给人类健康带来威胁。例如:各种电池类垃圾若不分类处理,就会释放有害物质;剩余餐饮类垃圾若不分类处理,将会滋生蚊子、苍蝇,使细菌大量繁殖、产生的沼气会使垃圾爆炸;家庭装修后的废弃类垃圾,会引起人们头痛、过敏、昏迷甚至癌症;在杀虫剂中,有将近50﹪含有致癌物,有些还会损伤动物的干脏。因此,我们要做到分类处理垃圾,提高垃圾的资源价值和经济价值,力争物尽其用。地球是我们赖以生存的家园,并为我们提供了如此美丽的环境。但是随着社会经济的迅速发展和城市人口的高度集中,生活垃圾的产量正在逐步增加,我们的这个家园正在被垃圾所包围。
4.但是,迄今为止,垃圾收集处理还是主要依赖于环卫工人起早贪黑地开着环卫车进行垃圾收集,环卫车的容量有限,很多时候垃圾会溢出或者掉落等,不仅影响市容市貌,也给环卫工人的工作徒增了很多负担。并且,城市的环卫工作需要雇佣很多很多环卫工人,这样一来需要花费大量的人力物力,效率也不一定会有所提高,而且垃圾桶的处理不及时也非常容易滋生细菌等,与此同时,在收集垃圾时,比如纸箱等等,非常占地方,使垃圾车有限的空间里放不了多少垃圾,收集效率低下。所以,解决垃圾出来问题迫在眉睫。
技术实现要素:
5.本发明克服了现有技术的不足,提供了一种基于无人驾驶的智能抓取分类压缩处理平台,为达到上述目的,本发明采用的技术方案为:一种基于无人驾驶的智能抓取分类压缩处理平台,包括:车身以及抓取手,车身包括控制室以及收集箱,控制室与收集箱通过底板固定连接,控制室的外壁设置有若干图像采集设备;
6.控制室的内部包括:控制台以及座位,控制台的内部设置有处理器,控制台包括由信号输入设备,控制台的一侧设置有显示屏;
7.收集箱的一侧设置有若干箱门,另一侧固定设置有滑道,滑道活动连接有若干抓取手,若干抓取手能够沿滑道滑动,抓取手包括第一关节、第二关节以及抓取部,抓取部设
置有检测设备;
8.收集箱的内部设置有若干隔板,隔板将收集箱的内部空间分为若干垃圾室;若干垃圾室的内部均设置有压缩机构,压缩机构包括输入端以及输出端,输入端连接有输入管,输出端链接有输出管;
9.输入管包括等径段以及放大段,等径段的一端与输入端固定链接,等径段的另一端与放大段呈一体成型连接,输入管的一端径长沿轴向进行放大;
10.收集箱的内部设置有若干干燥设备,干燥设备的数量与垃圾室的数量相等。
11.本发明一个较佳实施例中,收集箱的侧壁设置有若干消毒喷头,若干消毒喷头的内部均设置有消毒液,若干消毒喷头均连接有消毒瓶,消毒瓶的内部装有消毒液。
12.本发明一个较佳实施例中,若干隔板呈等距间隔排列,若干垃圾室的内部均设置有传感器;滑道与收集箱等长,箱门的数量与垃圾室的数量相等。
13.本发明一个较佳实施例中,第一关节的一端连接有滑动部,滑动部设置于滑道的内部;第一关节的另一端铰接有第二关节,第二关节连接有抓取部,抓取部为橡胶材料制成。
14.本发明一个较佳实施例中,还包括有若干车轮,若干车轮均连接有电机的输出端;收集箱的底部设置有重力感应传感器;信号输入设备包括键盘、鼠标、触摸屏、按钮以及声控采集设备的一种或多种的组合;
15.本发明一个较佳实施例中,收集箱的一侧设置有若干箱门,收集箱的顶部设置有伸缩盖,伸缩盖的一边与收集箱的一边固定连接,伸缩盖的两边与收集箱的两边通过滑道连接。
16.本发明还提供了一种基于无人驾驶的智能抓取分类压缩处理平台的路径规划方法,应用于任一一种基于无人驾驶的智能抓取分类压缩处理平台,其特征在于,
17.接收垃圾清理指令,获取垃圾桶位置信息,生成目的地信息;
18.采集图像信息,提取道路特征,结合目的地信息,生成行进决策;
19.获取天气信息,根据天气信息获取道路状态信息;
20.根据道路状态信息与行进决策进行路径规划,得到路径信息,处理平台按
21.照路径信息进行移动;
22.获取处理平台实时位置信息,将处理平台实时位置信息与预定位置信息进
23.行比较,得到偏差率;
24.判断偏差率是否大于预定阈值;
25.若大于,则生成修正信息,
26.根据修正信息对处理平台位移参数进行动态修正。
27.本发明一个较佳实施例中,获取天气信息,根据天气信息获取道路状态信息;具体包括:
28.获取天气信息,通过天气信息分析道路积水信息;
29.根据道路积水信息,计算道路积水深度;
30.判断道路积水深度是否大于预定深度;
31.若大于,则规避此道路,重新进行路径规划;
32.若小于,则根据积水深度计算处理平台移动速度,生成速度信息;
33.根据速度信息及积水深度建立积水飞溅模型;
34.根据积水飞溅模型生成积水飞溅距离;
35.判断积水飞溅距离是否大于预定阈值;
36.若大于,则生成反馈信息,通过反馈信息对平台移动速度进行调整。
37.本发明一个较佳实施例中,采集图像信息,提取道路特征,
38.根据道路特征确定处理平台行进模式,并生成对应的控制策略;
39.获取道路交通数据,生成专家预测数据库;
40.根据专家预测数据库预测处理平台动态信息,
41.将控制策略与处理平台动态信息进行匹配,生成匹配度信息;
42.将匹配度信息与预设信息进行比较,得到偏差率;
43.判断偏差率是否大于预设偏差率阈值,
44.若大于,则切换至局部路径规划模式,对处理平台行进路径进行局部路径规划;
45.若小于,则切换至全局路径规划模式,对处理平台行进路径进行全路径规划。
46.本发明一个较佳实施例中,获取障碍物信息,计算处理平台的当前位置与障碍物的距离w,当w小于预定阈值时,生成减速指令;
47.每间隔3秒获取一次交通信号灯的图像信息,对图像信息进行识别得到准行信号,与目标路线进行对比;
48.若目标路线为直行,且准行信号为左转或/和右转,则生成停车指令;
49.若目标路线为直行,且准行信号为直行,则生成行进指令。
50.本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
51.(1)本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,如可回收垃圾、有害垃圾等,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。
52.(2)每个垃圾室的内部均设置有压缩机构,压缩机构可以将垃圾进行压缩,在同样的空间里可以收集更多的垃圾,大大提高了垃圾收集的效率;压缩机构包括输入端以及输出端,垃圾可以从输入端进入,在压缩机构进行压缩后,再从输出端排出,进而收集到垃圾室内,大大节约了占用的空间;输入管包括等径段以及放大段;输入管的一端径长沿轴向进行放大,便于垃圾顺着输入管进入压缩机构。
53.(3)控制室的外壁设置有若干图像采集设备,同时可以实时探测与周边障碍物之间的距离,用于实现避障等功能;控制室内设置有座位,在无人驾驶全自动收集的基础上,还可以有工作人员进行实时的监督,如发生特殊情况,工作人员也可以进行实时的调整;控制台包括由信号输入设备,工作人员可以通过信号输入设备来调整整个装置的工作状态,同时可以根据实际情况,实时调整整个装置的功能使用等。
54.(4)收集箱的一侧设置有若干箱门,通过打开箱门可以将收集好的垃圾倒出,再进行下一步的集中处理;另一侧固定设置有滑道,若干抓取手能够沿滑道滑动,抓取手在抓住
垃圾桶后就可以进行移动,移动到对应的垃圾室之后在进行倾倒,高效完成垃圾分类;抓取部设置有检测设备,可以检测抓取部与垃圾桶之间的距离,便于根据距离来计算运动轨迹,顺利完成抓取倾倒。隔板将收集箱的内部空间分为若干垃圾室,不同的垃圾桶可以倒在不同的垃圾室里,这样一来就可以把垃圾分类收集,从而进行分类处理,简洁又高效;若干垃圾室的内部均设置有传感器,可以实时监测垃圾室内的垃圾重量,在达到垃圾车的限重值的时候发出预警,避免超重,安全运行。
55.(5)收集箱的侧壁设置有若干消毒喷头,垃圾暴露在空气中不可避免的会滋生很多细菌,对垃圾进行及时的消毒可以有效避免细菌滋生,同时可以对空气起到一个净化消毒的作用。抓取部为橡胶材料制成,摩擦力大,抓取动作稳固,同时还不会损伤垃圾桶。收集箱的顶部设置有伸缩盖,伸缩盖可以在倾倒垃圾时自动打开,在行驶过程中自动关闭,既能够方便垃圾车进行收集,又可以在行驶过程中避免垃圾掉落,封闭时有效遏制了恶臭气味的扩散。
56.(6)通过获取天气信息,采集道路积水,进行判别该道路是否达到行驶条件,若达到行驶条件,则通过积水飞溅模型判别平台移动过程中积水飞溅距离,进而根据积水深度确定最佳行驶速度,若无法达到行驶条件,则在进行路径规划过程中,自动规避此道路,提高道路规划精度及规划速度。
附图说明
57.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他实施例的附图。
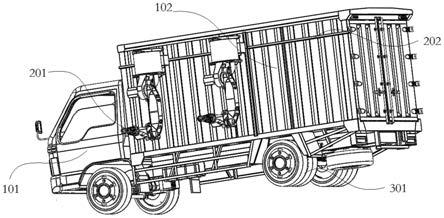
58.图1为处理平台示意图;
59.图2为垃圾室示意图;
60.图3为控制室示意图;
61.图4为压缩机构示意图;
62.图5为路径规划方法流程图;
63.图6为速度调整方法流程图;
64.图7为规划模式切换方法流程图
65.附图标记如下说明:101、控制室;102、收集箱;201、抓取手;202、滑道;301、车轮;401、垃圾室;402、箱门;501、显示屏;502、处理器;601、放大段;602、等径段;603、压缩机构。
具体实施方式
66.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成,需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
67.在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为
基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
68.在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本申请中的具体含义。
69.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
70.如图1
‑
4所示,一种基于无人驾驶的智能抓取分类压缩处理平台,包括:车身以及抓取手201,车身包括控制室101以及收集箱102,控制室101与收集箱102通过底板固定连接,控制室101的外壁设置有若干图像采集设备;控制室101的内部包括:控制台以及座位,控制台的内部设置有处理器502,控制台包括由信号输入设备,控制台的一侧设置有显示屏501。
71.控制室101的外壁设置有若干图像采集设备,同时可以实时探测与周边障碍物之间的距离,用于实现避障等功能;控制室101内设置有座位,在无人驾驶全自动收集的基础上,还可以有工作人员进行实时的监督,如发生特殊情况,工作人员也可以进行实时的调整;控制台包括由信号输入设备,工作人员可以通过信号输入设备来调整整个装置的工作状态,同时可以根据实际情况,实时调整整个装置的功能使用等。
72.收集箱102的一侧设置有若干箱门402,另一侧固定设置有滑道202,滑道202活动连接有若干抓取手201,若干抓取手201能够沿滑道202滑动,抓取手201包括第一关节、第二关节以及抓取部,抓取部设置有检测设备;
73.收集箱102的内部设置有若干隔板,隔板将收集箱102的内部空间分为若干垃圾室401;若干垃圾室401的内部均设置有压缩机构603,压缩机构603包括输入端以及输出端,输入端连接有输入管,输出端链接有输出管;
74.输入管包括等径段602以及放大段601,等径段602的一端与输入端固定链接,等径段602的另一端与放大段601呈一体成型连接,输入管的一端径长沿轴向进行放大;
75.收集箱102的内部设置有若干干燥设备,干燥设备的数量与垃圾室401的数量相等。
76.在此需要说明的一点是,每个垃圾室401的内部均设置有压缩机构603,压缩机构603可以将垃圾进行压缩,在同样的空间里可以收集更多的垃圾,大大提高了垃圾收集的效率;压缩机构603包括输入端以及输出端,垃圾可以从输入端进入,在压缩机构603进行压缩后,再从输出端排出,进而收集到垃圾室401内,大大节约了占用的空间;压缩机构603包括
输入端以及输出端,垃圾可以从输入端进入,在压缩机构603进行压缩后,再从输出端排出,进而收集到垃圾室401内,大大节约了占用的空间;输入管包括等径段602以及放大段601;输入管的一端径长沿轴向进行放大,便于垃圾顺着输入管进入压缩机构603。收集箱102的内部设置有若干干燥设备,可以对垃圾进行干燥处理,避免产生垃圾臭水等,减少细菌的滋生。
77.收集箱102的侧壁设置有若干消毒喷头,若干消毒喷头的内部均设置有消毒液,若干消毒喷头均连接有消毒瓶,消毒瓶的内部装有消毒液。
78.在此需要说明的一点是,收集箱102的侧壁设置有若干消毒喷头,垃圾暴露在空气中不可避免的会滋生很多细菌,对垃圾进行及时的消毒可以有效避免细菌滋生,同时可以对空气起到一个净化消毒的作用。
79.若干隔板呈等距间隔排列,若干垃圾室401的内部均设置有传感器;滑道202与收集箱102等长,箱门402的数量与垃圾室401的数量相等。
80.在此需要说明的一点是,收集箱102的一侧设置有若干箱门402,通过打开箱门402可以将收集好的垃圾倒出,再进行下一步的集中处理;
81.第一关节的一端连接有滑动部,滑动部设置于滑道202的内部;第一关节的另一端铰接有第二关节,第二关节连接有抓取部,抓取部为橡胶材料制成。
82.在此需要说明的一点是,抓取部为橡胶材料制成,摩擦力大,抓取动作稳固,同时还不会损伤垃圾桶。另一侧固定设置有滑道202,若干抓取手201能够沿滑道202滑动,抓取手201在抓住垃圾桶后就可以进行移动,移动到对应的垃圾室401之后在进行倾倒,高效完成垃圾分类;抓取部设置有检测设备,可以检测抓取部与垃圾桶之间的距离,便于根据距离来计算运动轨迹,顺利完成抓取倾倒。
83.还包括有若干车轮301,若干车轮301均连接有电机的输出端;收集箱102的底部设置有重力感应传感器;信号输入设备包括键盘、鼠标、触摸屏、按钮以及声控采集设备的一种或多种的组合;
84.在此需要说明的一点是,若干垃圾室401的内部均设置有传感器,可以实时监测垃圾室401内的垃圾重量,在达到垃圾车的限重值的时候发出预警,避免超重,安全运行。
85.收集箱102的一侧设置有若干箱门402,收集箱102的顶部设置有伸缩盖,伸缩盖的一边与收集箱102的一边固定连接,伸缩盖的两边与收集箱102的两边通过滑道202连接。
86.在此需要说明的一点是,收集箱102的顶部设置有伸缩盖,伸缩盖可以在倾倒垃圾时自动打开,在行驶过程中自动关闭,既能够方便垃圾车进行收集,又可以在行驶过程中避免垃圾掉落,封闭时有效遏制了恶臭气味的扩散。
87.如图5所示,本发明还提供了一种基于无人驾驶的智能抓取分类压缩处理平台的路径规划方法,应用于任一一种基于无人驾驶的智能抓取分类压缩处理平台,其特征在于,
88.接收垃圾清理指令,获取垃圾桶位置信息,生成目的地信息;
89.采集图像信息,提取道路特征,结合目的地信息,生成行进决策;
90.获取天气信息,根据天气信息获取道路状态信息;
91.根据道路状态信息与行进决策进行路径规划,得到路径信息,处理平台按
92.照路径信息进行移动;
93.获取处理平台实时位置信息,将处理平台实时位置信息与预定位置信息进
94.行比较,得到偏差率;
95.判断偏差率是否大于预定阈值;
96.若大于,则生成修正信息,
97.根据修正信息对处理平台位移参数进行动态修正。
98.在此需要说明的一点是,通过车载传感器检测道路环境及车辆自身等信息,同时预测车辆的运动状态,当车辆处于危险状态且大于设定值时,系统触发视觉、触觉或声音等警告,使得车辆控制终端对各种危险状态做出适当的反应从而减少意外事故的发生。车辆能够根据车载传感器感知自身车辆状态和车外环境等信息,利用各种数据处理算法获得决策控制所需信息,并以此作为依据进行决策控制,同时根据当前行驶任务自主发出控制命令,控制车辆在没有驾驶员监督下完全自主、安全、有效地实现驾驶。传感器包括内部传感器和外部传感器,内部传感器用于获取车辆本身的各种状态参数信息;外部传感器安装在智能车辆外部,用于感知外部环境信息。使用合适的传感器可以有效地获取车辆内、外部信息,有助于智能车辆正常工作,提高工作效率,传感器包括视觉传感器、距离传感器、激光雷达、gps等。针对不同传感器采集的信息进行信息融合,多个传感器所提供的在空间或时间上的冗余或互补信息或来自同一传感器的多特征信息依据准则进行融合和集成处理,形成对外部环境特征的一致性描述或解释,经过集成处理的多传感器信息融合扩大了系统的时空和频率覆盖范围,避免单一传感器的工作盲区。
99.如图6所示,本发明公开了平台移动速度调整方法流程图。
100.获取天气信息,根据天气信息获取道路状态信息;具体包括:
101.获取天气信息,通过天气信息分析道路积水信息;
102.根据道路积水信息,计算道路积水深度;
103.判断道路积水深度是否大于预定深度;
104.若大于,则规避此道路,重新进行路径规划;
105.若小于,则根据积水深度计算处理平台移动速度,生成速度信息;
106.根据速度信息及积水深度建立积水飞溅模型;
107.根据积水飞溅模型生成积水飞溅距离;
108.判断积水飞溅距离是否大于预定阈值;
109.若大于,则生成反馈信息,通过反馈信息对平台移动速度进行调整。
110.在此需要说明的一点是,通过获取天气信息,采集道路积水,进行判别该道路是否达到行驶条件,若达到行驶条件,则通过积水飞溅模型判别平台移动过程中积水飞溅距离,进而根据积水深度确定最佳行驶速度,若无法达到行驶条件,则在进行路径规划过程中,自动规避此道路,提高道路规划精度及规划速度,通过监测路面状况如积水、道路标志标线污损、障碍物较多等路面,以及对恶劣天气条件如强光或阴影、雨雪状态信息,能够实现针对不同的天气情况进行适配性的规划垃圾处理平台行驶路径,以实现垃圾处理定向运输。
111.如图7所示,本发明公开了路径规划模式切换方法流程图。
112.采集图像信息,提取道路特征,
113.根据道路特征确定处理平台行进模式,并生成对应的控制策略;
114.获取道路交通数据,生成专家预测数据库;
115.根据专家预测数据库预测处理平台动态信息,
116.将控制策略与处理平台动态信息进行匹配,生成匹配度信息;
117.将匹配度信息与预设信息进行比较,得到偏差率;
118.判断偏差率是否大于预设偏差率阈值,
119.若大于,则切换至局部路径规划模式,对处理平台行进路径进行局部路径规划;
120.若小于,则切换至全局路径规划模式,对处理平台行进路径进行全路径规划。
121.在此需要说明的一点是,采用栅格法进行全局路径规划的方法就是栅格遍历的过程,也即遍历所有的可能路径直到找到可行路径,规划空间描述规范、形式简单,一致性好,容易实现。每个单元格的值表示该位置处障碍物存在的概率。当智能车辆移动时,栅格图随着车辆运动,并根据当前观测结果更新每个栅格的值。每个栅格对车辆施加一个虚拟的排斥力,大小与单元格值的大小成正比,与单元格到智能车辆所在栅格的距离成反比,同时目标位置对智能车辆产生引力,两者的矢量和决定了智能车辆的运动方向。
122.获取障碍物信息,计算处理平台的当前位置与障碍物的距离w,当w小于预定阈值时,生成减速指令;
123.每间隔3秒获取一次交通信号灯的图像信息,对图像信息进行识别得到准行信号,与目标路线进行对比;
124.若目标路线为直行,且准行信号为左转或/和右转,则生成停车指令;
125.若目标路线为直行,且准行信号为直行,则生成行进指令。
126.在此需要说明的一点是,每3秒获取一次交通等的图像信息,既符合交通灯的变化规律,又能够及时地对交通灯的变化进行识别并生成对应的指令,整个运动装置都遵守交通规则,不会影响到道路上的其他行人或者车辆。
127.本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,如可回收垃圾、有害垃圾等,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。
128.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1