一种塑料框体取件工装的制作方法
[0001]
本实用新型涉及塑料框体制备,尤其与一种塑料框体取件工装有关。
背景技术:
[0002]
塑料框体广泛应用果蔬市场,用于盛装或容纳。塑料框体通过注塑模具加工成型,然后取下后,对其进行去毛刺处理,然后进行成品堆放。
[0003]
在取件过程中,目前多是人工利用工具进行拿取,不仅效率低,而且还需要转运,不利于精益化生成管理对时间成本的需求,有必要进行改进。
技术实现要素:
[0004]
针对上述现有技术不足,本实用新型提供一种塑料框体取件工装,实现自动抓取,并实现提升转运后,再放置,利于提高工效,节省人力成本,实用性强。
[0005]
为了实现本实用新型的目的,拟采用以下方案:
[0006]
一种塑料框体取件工装,其特征在于,包括:
[0007]
抓取组件,用于通过松开/夹紧实现抓取;
[0008]
升降机构,包括一对升降气缸和一对竖向导轨,抓取组件滑动配合于一对竖向导轨,升降气缸的活动端连接抓取组件;以及
[0009]
水平推送机构,包括顶架、沿顶架长度方向滑动配合于顶架的上滑块以及一对水平气缸,水平气缸固定端设于顶架一端的安装板,活动端连接于上滑块一端的承接板;
[0010]
升降气缸的固定端设于上滑块底部。
[0011]
在一些实施方式中,顶架沿长度方向设有t型滑轨,上滑块滑动配合于t型滑轨。
[0012]
在一些实施方式中,抓取组件,包括:
[0013]
基架,其上开设一组水平滑槽;
[0014]
滑板,有一对,相对间隔设置,竖向布置,滑板上下端分别配合于水平滑槽;
[0015]
抓板,垂直于滑板所在平面设置,每个滑板具有至少2个间隔设置的抓板,抓板内侧面具有阵列的齿部;以及
[0016]
驱动机构,设于基架,用于驱动一对滑板缩小或扩大间距。
[0017]
在一些实施方式中,驱动机构,包括:
[0018]
驱动电机,设于基架;
[0019]
齿轮,与驱动电机输出轴连接;
[0020]
上齿条,设于齿轮上方并与齿轮啮合,上齿条一端连接其中一个滑板;以及
[0021]
下齿条,设于齿轮下方并与齿轮啮合,下齿条一端连接其中另一个滑板;
[0022]
上齿条和下齿条平行于水平滑槽设置。
[0023]
在一些实施方式中,驱动电机设于基架背部的安装座,驱动电机背部设有紧固背板,紧固背板两端固定于基架。
[0024]
在一些实施方式中,基架滑动配合于一对竖向导轨,升降气缸的活动端连接基架。
[0025]
在一些实施方式中,基架背部设有一对配合部,配合部设有竖向通槽,竖向导轨配合于竖向通槽,升降气缸的活动端连接配合部。
[0026]
本实用新型实施例的有益效果在于:
[0027]
利用驱动电机、齿轮、上下齿条,配合滑块和水平滑槽,实现对抓板的抓紧和松开,同时结合基架与升降机构的配合结构,以及升降机构与水平推送机构的配合而机构,在实现自动抓取的同时,实现提升转运后,再放置,利于提高工效,节省人力成本,实用性强。
附图说明
[0028]
本文描述的附图只是为了说明所选实施例,而不是所有可能的实施方案,更不是意图限制本实用新型的范围。
[0029]
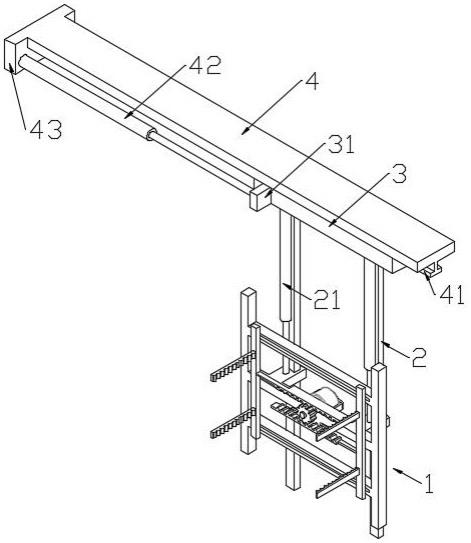
图1示出了本实用新型实施例的立体结构示意图一。
[0030]
图2示出了本实用新型实施例的立体结构示意图二。
[0031]
图3示出了本实用新型实施例的抓取组件立体结构示意图一。
[0032]
图4示出了本实用新型实施例的抓取组件立体结构示意图二。
[0033]
图5示出了本实用新型实施例的抓取组件正视结构示意图。
具体实施方式
[0034]
为了使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型做进一步的详细描述。
实施例
[0035]
如图1~2所示,本实例的一种塑料框体取件工装,包括:抓取组件1、用于对抓取组件1进行升降的升降机构、用于对升降机构及抓取组件1进行水平移动的水平推送机构。
[0036]
其中,抓取组件1,用于通过松开/夹紧实现抓取。
[0037]
其中,升降机构,包括一对升降气缸21和一对竖向导轨2,抓取组件1滑动配合于一对竖向导轨2,升降气缸21的活动端连接抓取组件1。
[0038]
其中,水平推送机构,包括顶架4、沿顶架4长度方向滑动配合于顶架4的上滑块3以及一对水平气缸42,水平气缸42固定端设于顶架4一端的安装板43,活动端连接于上滑块3一端的承接板31;升降气缸21的固定端设于上滑块3底部。
[0039]
具体的,在本实例中,顶架4沿长度方向设有t型滑轨41,上滑块3滑动配合于t型滑轨41。通过此种方式配合,对于需要进行的水平移动,可保证稳定性和线性约束性。
[0040]
应用时,利用抓取组件1对注塑完成的塑料框体进行抓取,具体是通过夹紧进行抓紧。抓紧后,利用升降气缸21使抓取组件1沿竖向导轨2升起到预定高度,然后暂停升降气缸21。然后利用水平气缸42,进行推送/收回,使抓取组件1和升降机构,从当前位置沿顶架4长度方向向另一个位置水平移动,水平移动的目的位置可以预设;水平运动就位后,再次利用升降气缸21使抓取组件1沿竖向导轨2下降到一定高度。然后,控制抓取组件1松开,使夹持的塑料框体就位于去毛刺区域。
[0041]
通过此种结构的工装应用,实现了自动化抓取、转运,提高了工效。
[0042]
作为本实例的一种具体实施方式,抓取组件1的结构,如图3~5所示:
[0043]
抓取组件1,包括:基架11、滑板15、抓板16和驱动机构。
[0044]
具体的,基架11上开设一组水平滑槽14。滑板15有一对,相对间隔设置,竖向布置,滑板15上下端分别配合于水平滑槽14。抓板16垂直于滑板15所在平面设置,每个滑板15具有至少2个间隔设置的抓板16,抓板16内侧面具有阵列的齿部17。驱动机构设于基架11,用于驱动一对滑板15缩小或扩大间距。。
[0045]
在需要抓取时,利用驱动机构运作,使滑块15沿水平滑槽14移动,使滑板15之间的间距缩小,以使得抓板16将塑料框体夹紧,具体的,由于设有齿部17,可以使得针对塑料框体为不同结构类型及尺寸的时,也能有较好的夹持效果。
[0046]
在需要放下时,利用驱动机构运作,使滑块15沿水平滑槽14移动,使滑板155之间的间距扩大,以使得抓板16将塑料框体松开,塑料框体自由下落。
[0047]
利用多个抓板6从两侧进行对塑料框体的抓紧,抓取有效性得到保证。
[0048]
作为上述具体实施例的,更具体的实施手段之一:
[0049]
驱动机构,包括:驱动电机18、齿轮19、上齿条152和下齿条151。
[0050]
具体的,驱动电机18设于基架11;齿轮19与驱动电机18输出轴连接;上齿条152设于齿轮19上方并与齿轮19啮合,上齿条152一端连接其中一个滑板15;下齿条151设于齿轮19下方并与齿轮19啮合,下齿条151一端连接其中另一个滑板15;上齿条152和下齿条151平行于水平滑槽14设置。
[0051]
具体的,驱动电机18选择正反转电机。
[0052]
基于此,在需要抓取时,利用驱动电机18向转动,带动齿轮19转动,齿轮19带动啮合的上齿条152和下齿条151均朝向齿轮19轴线方向移动或者分别朝向外侧移动,从而实现对滑板15沿水平滑槽14的移动。
[0053]
作为本实例中更加具体的实施方式,驱动电机18设于基架11背部的安装座118,驱动电机18背部设有紧固背板181,紧固背板181两端固定于基架11。
[0054]
作为本实例中更加具体的实施方式,基架11滑动配合于一对竖向导轨2,升降气缸21的活动端连接基架11。如图3~5所示,具体是,基架11背部设有一对配合部12,配合部12设有竖向通槽13,竖向导轨2配合于竖向通槽13,升降气缸21的活动端连接配合部12。
[0055]
从而,升降气缸21运作时,通过活动端带动配合部12移动,具体是通过竖向通槽13沿竖向导轨2上下移动。
[0056]
以上仅为本实用新型的优选实施例,并不表示是唯一的或是限制本实用新型。本领域技术人员应理解,在不脱离本实用新型的范围情况下,对本实用新型进行的各种改变或同等替换,均属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1