一种刚性齿板链及使用该刚性齿板链的驱动链条和驱动装置的制作方法
[0001]
本实用新型涉及一种刚性齿板链及使用该刚性齿板链的驱动链条和驱动装置,适用于自动扶梯或自动人行道。
背景技术:
[0002]
背景技术1:传统的自动扶梯或自动人行道中,如图1示:其梯路系统由扶梯及桁架系统1、驱动主机2、传动链条3、驱动主轴4、梯级链轮5、梯级链条6、梯级7等组成。其中驱动主机2通过传动链条3驱动驱动主轴4转动,经由驱动主轴4上对称布置的两个梯级链轮5驱动两条闭合的梯级链条6上下循环运动,经由梯级链条6带动安装在梯级链条6及扶梯及桁架系统1内的对应导轨上的连续的梯级7,可实现梯路上下循环运动。
[0003]
由上述可知,在传统的自动扶梯或自动人行道中,由驱动主机2、传动链条3、驱动主轴4及梯级链轮5等组成的动力驱动装置,只能安装于扶梯及桁架系统1的上端部,系统中所有的驱动动力都由上端部的梯级链轮5驱动梯级链条6实现。所以,当自动扶梯或自动人行道中提升高度大于20m时,传动链条3会因驱动动力大、驱动链条过长等因素,导致出现传动链条3上的张应力过大等风险。所以,常规的端部驱动的自动扶梯或自动人行道越来越不能满足实际需求。
[0004]
如何克服上述难题与不足,是业内多年来一直在研究的难题:能否采用类似如中国高铁动车组的动力驱动装置,用多组独立的动力驱动装置以实现对自动扶梯或自动人行道的梯路系统的分段多级驱动,从而实现整个梯路的驱动动力的均匀分布,大幅度降低传动链条3上的张应力,从而实现运行平稳且安全,并可理论上实现突破其提升高度等工程需求的限制。
[0005]
背景技术2:美国专利no.3,707,220提出在梯路系统可布置多组动力驱动装置。但是,在该方案中,与分级驱动链轮啮合的是常规的梯级链条,则由链传动的工作原理可知,在梯级链条中间布置驱动链轮,因梯级链条呈直线运行,不能实现对驱动链轮有必须的传动角度包角,驱动链轮与梯级链条不能实现多齿啮合,且只能是单齿啮合。所以,在实际的运用中上述方案将不能实现动力的平稳传动,不能满足实际需求。
[0006]
因此,要克服上述难题与不足,实现分段布置的多级驱动,关键在于如何实现驱动链轮与驱动链条间多齿啮合,从而实现驱动的平稳运行,是业内多年来一直在研究的难题。
[0007]
背景技术3:日本专利jp1987014473b2公开的方案中,如图2所示,其梯路系统中扶梯及桁架系统1内部采用多个驱动主机2布置,其中工作原理如图3、图4所示:驱动主机2驱动对称布置的两组驱动链轮8,分别位于扶梯及桁架系统1两侧。每组驱动链轮8由2个平行布置的驱动链轮组组成。两组驱动链条9对应由两组驱动链轮8驱动。其中,驱动链条9由中间布置的梯级齿条链条9-2和两边布置的链轮链条9-1组合而成。链轮链条9-1与两个驱动链轮对应啮合,从而驱动梯级齿条链条9-2;由梯级齿条链条9-2与梯级齿条15啮合,从而驱动梯路系统。
[0008]
由上可知,该方案中的关键技术是:采用梯级齿条15与对应的直线布置的驱动链
条9对应啮合,从而实现了驱动链条9与梯级齿条15间多齿啮合,使扶梯平稳运行,从而实现了整梯布置多个驱动单元进行分级驱动。
[0009]
但是,也由上可知,该方案中,在整梯系统中用了梯级齿条15替换了常规整梯系统中的梯级链条6,与现有成熟成标准化的梯路系统完全不同,所以,对应的实际成本也非常的高,且对零部件和整梯的制造、装配及调试工艺要求极高,因此限制了其实际的市场应用推广。
[0010]
因此,由于上述的不足,能否在现有成熟成标准化的梯路系统中实现分段布置的多级驱动,是业内多年来一直在研究并希望能解决的。
[0011]
背景技术4:中国专利cn100537396c公开的方案中,在现有成熟成标准化的梯路系统中,布置多个驱动主机,其中工作原理:由载荷梯级链条、驱动链条、主动链轮、被动链轮等组成。其中,对应载荷梯级链条下布置1条驱动链条,其关键的技术方案:驱动链条由驱动联结块、径向外凸起、垫肩、驱动链轮、驱动滚轮销等组成,在驱动链条下还布置有驱动轨。该专利方案在单排链的滚轮上布置能与载荷梯级链条啮合的径向外凸起等结构,实际的工艺结构难实现,而且驱动链条与载荷梯级链条啮合中还存在重大的不足,即因为该专利中驱动链条是呈“柔性”的,每节链条都可以绕驱动链滚轮轴上下自由转动等;同理,载荷梯级链条也呈“柔性”。所以,当两条“柔性”的链条相互啮合时,即使在直线段间的链条下设置有链条导轨,链条间啮合受力后还是会下行弯曲,从而导致出现啮合脱齿等现象。因此,该专利方案在实际运行中无法实现驱动部件的平稳运行。
技术实现要素:
[0012]
鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种刚性齿板链及采用该刚性齿板链的刚性驱动链条及驱动装置,该刚性驱动链条能与上方的梯级链条配合,实现自动扶梯或自动人行道的分级驱动,并且该刚性驱动链条与梯级链条配合段不会下垂,始终保持多齿传动。
[0013]
为实现上述目的及其他相关目的,本实用新型提供一种刚性齿板链,其包括由若干结构相同的齿形单体相互连接形成的齿板链及位于所述齿板链至少一侧由若干链板单体构成的链板组;齿形单体两端分别设有连接两侧相邻齿形单体的连接孔;链板单体包括分别位于两端的转动部、设于一侧的卡位部及可与相邻链板单体的卡位部相配合以限制链板单体转动方向的限位部,两端转动部分别设有与相邻链板单体对应连接的贯通孔;齿形单体及对应的链板单体通过依次贯穿连接前述连接孔及贯通孔的连接轴而相互连接。齿板链可与梯级链条配合,驱动梯级链条。相对应的链板单体和齿形单体串在一起后,整个刚性齿板链即可保持刚性,向上与梯级链条配合,不会下垂,能保持多齿传动。同时,由于限位部不会阻碍转动部的自由转动,本实用新型刚性齿板链在链轮处还可以自由过弯。本实用新型的刚性齿板链完美地解决了目前自动扶梯或自动人行道分级驱动中存在的问题。
[0014]
优选地,限位部与同端部的转动部位于不同平面内。这种结构,限位部不会阻碍转动部的自由转动。当然,也可通过其它方式来实现,例如:限位部到转动部转动中心的距离大于转动部的半径。这样,限位部也不会阻碍转动部的自由转动。
[0015]
本实用新型链板单体中的限位部有多种实现方式:
[0016]
一种实现方式:限位部从链板单体中部向前延伸形成,并且限位部和同侧的转动
部在板体厚度方向上错位设置,错位的空间与板体厚度相匹配。该方案能让组合在一起的两链板单体更加美观,并且不影响内侧部件的安装和使用。
[0017]
优选地,齿板链两侧分别设有链板组,限位部同侧的转动部均朝外侧错位设置。这样,两侧的链板组其内侧可以保持在同一平面上,不仅美观,也便于其内侧部件的安装和使用。
[0018]
优选地,两错开方向相反的链板单体可叠加使用,两链板单体错位设置形成的空间刚好可以容纳相邻两块叠加链板单体的端部。这样,可以增强链轮链条每侧链板组的强度。
[0019]
另一种实现方式:限位部由链板单体上端面朝向相邻链板单体卡位部上方弯折延伸形成。该方案同样能实现本实用新型的目的:防止组合在一起的两链板下垂,又不会阻碍转动端的自由转动。
[0020]
本实用新型另一个实用新型目的是提供一种使用上述刚性齿板链的自动扶梯或自动人行道用刚性驱动链条,包括由齿板链、链板组构成的刚性齿板链、及位于刚性齿板链两侧的包含若干滚子单元的刚性链轮链条,刚性链轮链条内侧与所述刚性齿板链共用一个链板组,所述连接轴贯穿连接刚性链轮链条的对应滚子单元。这样,驱动链条即可与链轮配合,通过链轮与两侧的刚性链轮链条配合,刚性齿板链就有了动力,可以驱动梯级链条,实现分级驱动的目的。由于刚性齿板链、刚性链轮链条的防垂作用,刚性齿板链始终保持与梯级链条多齿传动。本实用新型完美地解决了目前自动扶梯或自动人行道分级驱动中存在的问题。当然,驱动链条也可采用其它方式,只要能驱动刚性齿板链即可。例如,在刚性齿板链的连接轴上装上滚子单元,刚性齿板链就成为一条完整的链条,可以与链轮配合,进而驱动梯级链条。也可以在连接轴两侧装上轴承,让连接轴成为滚子单元,与链轮配合。
[0021]
优选地,刚性链轮链条的链板组也由所述链板单体组合而成。这样,进一步保障了驱动链条的刚性,防止驱动链条下垂。
[0022]
链板单体其限位部和同侧的转动部在板体厚度方向上错位设置,位于刚性链轮链条两侧的转动部错位方向相反。该方案能让组合在一起的刚性链轮链条更加美观,并且不影响内侧滚子的安装和使用。
[0023]
一种使用上述自动扶梯或自动人行道用刚性驱动链条的驱动装置,包括固定在扶梯及桁架系统上的机座,设于机座上的驱动主机、主动链轮、从动链轮,主动链轮、从动链轮上设有与刚性驱动链条相匹配使用的传动结构,所述齿板链的齿形单体朝上与梯级链条相配合使用。该驱动装置完美地解决了目前自动扶梯或自动人行道分级驱动中存在的问题。
[0024]
如上所述,本实用新型具有以下有益效果:
[0025]
1.本实用新型方案解决了自动扶梯或自动人行道分级驱动中多齿啮合难题,可实现在自动扶梯及人行道中采用多组独立的动力驱动装置进行多级驱动。
[0026]
2.本实用新型方案没有改变现有的自动扶梯及人行道的梯级链条系统,更无须采用其他复杂的齿轮齿条结构,因此,整梯的梯路系统及驱动链条等结构及制造工艺更简单成熟,技术上更安全可靠。
[0027]
3.本实用新型方案适用于现有的自动扶梯及人行道中的梯级链条系统,无须采用其它复杂的齿轮齿条结构,成本低,应用范围广,更利于市场推广。
附图说明
[0028]
图1是背景技术1的结构示意图;
[0029]
图2是背景技术3的结构示意图;
[0030]
图3是背景技术3梯级齿条和驱动链条啮合的结构示意图;
[0031]
图4是背景技术3驱动链条俯视的结构示意图;
[0032]
图5是本实用新型实施例1的结构示意图;
[0033]
图6是本实用新型实施例2的结构示意图;
[0034]
图7是本实用新型实施例1两链板单体组合的结构示意图;
[0035]
图8是本实用新型实施例1两链板单体组合的立体结构示意图;
[0036]
图9是本实用新型实施例1两链板单体组合后在驱动链轮处过弯的结构示意图;
[0037]
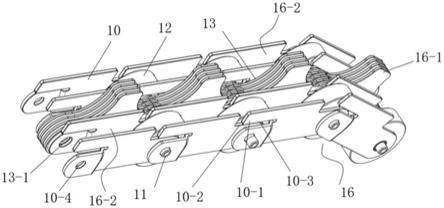
图10是本实用新型实施例1驱动链条的主视结构示意图;
[0038]
图11是本实用新型实施例1驱动链条的俯视结构示意图;
[0039]
图12是本实用新型实施例1驱动链条的立体结构示意图;
[0040]
图13是本实用新型实施例1齿板链齿形单体的结构示意图;
[0041]
图14是本实用新型实施例3的结构示意图;
[0042]
图15是本实用新型实施例1驱动装置的结构示意图;
[0043]
图16是本实用新型实施例1驱动装置的工作原理图;
[0044]
图17是本实用新型实施例1的齿板链与梯级链条啮合的结构示意图。
[0045]
附图标记说明:
[0046]
1、扶梯及桁架系统;2、驱动主机;3、传动链条;4、驱动主轴;5、梯级链轮;6、梯级链条;7、梯级;8、驱动链轮;8-1、主动链轮;8-2、从动链轮;9、驱动链条;9-1、链轮链条;9-2、梯级齿条链条;10、链板单体;10-1、限位部;10-2、卡位部;10-3、转动部;10-4、贯通孔;11、连接轴;12、滚子单元;13、齿形单体;13-1、连接孔;14、机座;15、梯级齿条;16、刚性驱动链条;16-1、刚性齿板链;16-2、刚性链轮链条。
具体实施方式
[0047]
以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
[0048]
请参阅图1至图17。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0049]
实施例1:参考图5、图7-13,本实用新型提供一种刚性齿板链16-1,其包括由若干结构相同的齿形单体13相互连接形成的齿板链及位于齿板链两侧由若干链板单体10构成的链板组。齿形单体13可以叠加使用,增加强度。本实施例中,如图12所示,采用了四块齿形
单体叠加一起使用。链板单体10包括分别位于两端的转动部10-3、设于一侧的卡位部10-2及可与相邻链板单体的卡位部相配合以限制链板单体转动方向的限位部10-1。限位部10-1与同端部的转动部10-3位于不同平面内。限位部10-1从链板单体10中部向前延伸形成。限位部10-1和链板单体10的主体部分并没有错位,在一个平面上。限位部10-1和同侧的转动部10-3在板体厚度方向上错位设置,错位的空间与板体厚度相匹配。该错开可以通过冲压片状的板体,使板体前端向一侧凹进实现。同时凹进部分与板体的连接处呈弧形,可以保证另一块链板的转动部10-3自由转动,没有阻碍。齿形单体13两端分别设有连接两侧相邻齿形单体的连接孔13-1。两端转动部10-3分别设有与相邻链板单体对应连接的贯通孔10-4;齿形单体13及对应的链板单体10通过依次贯穿连接前述连接孔及贯通孔的连接轴11而相互连接。
[0050]
由上述可知,链板单体10是通用件,便于加工,降低成本。多块相同结构的链板单体10和齿形单体13可以组建成一条刚性齿板链。刚性齿板链间可以产生向前的推力或向后的拉力,但不会受力向下弯曲,还可以绕驱动链轮自由转动。
[0051]
链板单体10的厚度t、宽度尺寸h、h1及h2等可按强度需求设计,如t=4mm等等。链板单体10两端开有供连接轴11穿设的贯通孔10-4。贯通孔10-4的大小按设计需求设计。
[0052]
如图7-13所示,本实用新型还提供一种使用上述刚性齿板链的自动扶梯或自动人行道用刚性驱动链条16,包括由齿板链、链板组构成的刚性齿板链16-1、及位于刚性齿板链两侧的包含若干滚子单元12的刚性链轮链条16-2,刚性链轮链条16-2的链板组也由链板单体10组合而成。
[0053]
刚性链轮链条16-2内侧与所述刚性齿板链16-1共用一个链板组,连接轴11贯穿连接刚性链轮链条16-2的对应滚子单元12。连接轴11和各孔的连接处可以设轴套,使连接轴11的转动效果更好。链板单体10其限位部10-1和同侧的转动部10-3在板体厚度方向上错位设置,位于刚性链轮链条16-2两侧的转动部10-3错位方向相反。
[0054]
两贯通孔10-4间的距离p是该驱动链条的节距p。每根刚性链轮链条16-2的节距相同,并与齿形单体的两连接孔13-1之间的距离相同,同时与梯级链条6的节距也相同。
[0055]
如图15-17所示,本实用新型还提供一种上述自动扶梯或自动人行道用刚性驱动链条的驱动装置,包括固定在扶梯及桁架系统1上的机座14,设于机座14上的驱动主机2、主动链轮8-1、从动链轮8-2,主动链轮8-1、从动链轮8-2上设有与刚性驱动链条16相匹配使用的传动结构,所述齿板链的齿形单体13朝上与梯级链条6相配合使用。
[0056]
驱动主机1呈框架结构,经固定框架机座14联接固定于扶梯及桁架系统1的中间段,可按需求布置多个。在驱动主机1两侧对称各布置1组主从链轮装置。其中,主动链轮8-1、从动链轮8-2是参数相同的双排链轮,并与闭合的刚性驱动链条16中对应的两根刚性链轮链条16-2啮合并循环转动。刚性驱动链条16中的刚性齿板链16-1与扶梯及桁架系统1内的梯级链条6啮合,并可驱动扶梯的梯路系统上下运行,见图16及图17所示。
[0057]
主动链轮8-1和从动链轮8-2间的距离越大,则刚性驱动链条16与梯级链条6的啮合齿数越多。所以,每组刚性驱动链条16可实际需求设计单边啮合齿数至少在3个齿以上。
[0058]
使用时,将多个驱动装置布置在梯路系统中。驱动主机2启动后,可以驱动两侧的驱动链轮8转动,从而带动主动链轮8-1、从动链轮8-2上的刚性驱动链条16转动。刚性驱动链条16中部的刚性齿板链16-1通过其齿形单体13带动梯级链条6上下循环运动。最终实现
了自动扶梯或自动人行道的分级驱动。
[0059]
采用本实用新型方案,即解决了现有自动扶梯或自动人行道分级驱动中存在的难题。本实用新型方案既保证了刚性驱动链条16和梯级链条6之间的多齿传动,同时又适用于现有的梯级链条6,无需更换零部件,大大降低成本,适用范围广。
[0060]
实施例2:如图6所示,与实施例1不同之处在于,限位部10-1由链板单体10上端面朝向相邻链板卡位部10-2上方弯折延伸形成。链板单体10采用这样的结构,同样能实现本实用新型的目的。
[0061]
实施例3:如图14所示,与实施例1不同之处在于,两错开方向相反的链板单体10可叠加使用,两链板单体10错位设置形成的空间刚好可以容纳相邻两块叠加链板单体10的端部。这样,可以增加刚性驱动链条16的强度。
[0062]
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1