一种送料辊道及轮毂码垛装置的制作方法
1.本技术涉及铝合金轮毂转运技术领域,具体涉及一种送料辊道及轮毂码垛装置。
背景技术:
2.在汽车铝合金轮毂转运技术领域,在包装车间对铝合金轮毂进行码垛时,是使用搬运机器人将送至辊道末端的待包装轮毂依次拾取到第一层拍子上,一个拍子上均匀放置4
‑
6个轮毂,再由机器人拾取第二层拍子摞放置在第一层轮毂上,机器人再按照第一层的摆放顺序将待包装的轮毂拾取放置在第二层拍子上,按照这样的顺序码至5
‑
6层为一垛。
3.码成一垛的轮毂再经过包装膜包裹后,装车发送至汽车制造厂,汽车制造厂码成一垛的轮毂后拆除包装膜,再卸下轮毂之前,需要先由人工在每个轮毂上安装气门孔,为后续安装轮胎做准备。在现有技术中,机器人在进行轮毂码垛时,对每个轮毂的摆放的方向是随机的,汽车制造厂的工作人员在安装气门时,需要先找到气门孔位置,再安装气门孔,另外,由于轮毂摆放的方向随机,还有一半的概率是轮毂的气门孔方向朝里,这将使工作人员的气门安装工作非常不方便,而且浪费大量的安装时间。
技术实现要素:
4.本技术实施例提供了一种送料辊道及轮毂码垛装置,可解决背景技术中的问题。
5.为实现上述目的,本实用新型提供如下的技术方案:
6.第一方面,提供一种送料辊道,所述送料辊道的出料端设置有取料顶升组件,所述取料顶升组件包括顶升气缸托架、顶升气缸、升降板、旋转电机、编码器、顶升托架,所述送料辊道的出料端下方垂直于输送方向的两侧对称设置有两个l型的顶升气缸托架,两个所述顶升气缸托架上对称设置有两个方向朝上的顶升气缸;两个所述顶升气缸的输出端均与所述升降板固定连接,所述升降板上固定有旋转电机,所述旋转电机同轴设置有编码器,所述旋转电机的转轴的顶部固定有顶升托架,所述送料辊道的出料端的中间位置设置有与所述顶升托架形状匹配的缺口,所述顶升托架设置在所述缺口处。
7.在一些实施例中,所述顶升托架包括至少两个与所述送料辊道的输送方向垂直的横杆和穿过所述横杆中心处的纵杆。
8.在一些实施例中,两个所述顶升气缸托架上分别固定设置一个导向柱,两个导向柱呈左右对称,所述升降板上设置有两个左右对称的导向柱开口,两个所述导向柱开口处均固定设置有竖直方向的导向套,两个所述导向套分别套设在两个所述导向柱上,两个所述导向柱的顶端均固定在所述辊道支架的短辊子支撑架上。
9.在一些实施例中,所述送料辊道还包括辊道支架、长辊子、短辊子、驱动电机、链条,所述缺口的两侧安装有两排短辊子,所述辊道支架上安装有一排长辊子,所述短辊子和所述长辊子平行,所述短辊子和长辊子上均设置有链轮,并且与两排所述短辊子邻近的一根长辊子为双链轮,该长辊子的两个链轮与紧挨的不同排的两个所述短辊子的链轮通过链条连接;所述长辊子的链轮之间以及所述短辊子的链轮之间均通过链条依次连接,所述驱
动电机的输出轴通过链条连接所述送料辊道的入料端的第一个所述长辊子的链轮,所述驱动电机能够通过链条与链轮的配合驱动所述长辊子和短辊子转动。
10.第二方面,本技术的实施例中还提供了一种轮毂码垛装置,包括上述任一实施例中所述的送料辊道,还包括控制单元、搬运机器人和矩形拍子,所述送料辊道的入料端的上方设置有摄像头支架,所述摄像头支架上安装有方向朝下的摄像头;其中一个所述顶升气缸的缸筒上端设置有上位磁电开关,缸筒下端设置有下位磁电开关;所述送料辊道的两侧辊道支架上位于所述摄像头支架的后方设置有第一激光对射式光电传感器;所述送料辊道的两侧辊道支架上位于所述取料顶升组件的后方设置有第二激光对射式光电传感器;所述控制单元电连接所述摄像头、旋转电机、编码器、上位磁电开关、下位磁电开关、所述顶升气缸的电磁阀、所述第一激光对射式光电传感器和所述第二激光对射式光电传感器;所述搬运机器人能不改变轮毂的气门孔方向将所述轮毂拾取至所述矩形拍子上的指定位置。
11.在一些实施例中,所述控制单元包括plc控制模块。
12.在一些实施例中,所述矩形拍子上设置4
‑
6个轮毂放置位置。
13.与现有技术相比,本实用新型的有益效果为:
14.本实用新型提供了一种送料辊道,所述送料辊道的出料端设置有取料顶升组件,所述取料顶升组件能将所述送料辊道上的轮毂顶升并旋转,并且设置编码器使旋转电机的旋转角度精确控制,能使送料辊道上的轮毂旋转一定的角度使轮毂码垛之后气门孔均朝外,并且靠近拍子的边缘,便于气门的安装,省略了产线上的调整气门孔位置的工序,提高了安装气门的效率。
15.本实用新型还提供了一种轮毂码垛装置,包括送料辊道、控制单元、搬运机器人和矩形拍子,所述送料辊道上设置有摄像头支架、摄像头、取料顶升组件,所述摄像头可以拍摄所述轮毂图像,所述控制单元根据所述轮毂图像得出所述轮毂需要旋转的角度,所述取料顶升组件将所述送料辊道上的轮毂顶升并旋转一定的角度,所述搬运机器人不改变轮毂的气门孔方向将所述轮毂拾取至所述矩形拍子上的对应的编号位置,这样码垛的轮毂的气门孔均朝外,并且靠近拍子的边缘,汽车制造厂的工作人员无需费时寻找气门孔,只需要站在拍子边缘,自上而下就能够完成每层轮毂气门的安装,气门安装方便,节约时间。此外,本技术实施例中有一系列的电器控制,设置了上位磁电开关能对顶升气缸顶升后的旋转电机的旋转开启时机进行合理控制,设置了下位磁电开关能使送料辊道的下一个轮毂的继续送料开启时机进行合理的控制,设置编码器使旋转电机的旋转角度精确控制,设置第一激光对射式光电传感器使图像的采集更准确,采集图像位置最佳,同时设置第二激光对射式光电传感器使送料辊道的驱动电机停止输送同时取料顶升组件开始在合适的位置进行顶升和旋转,上述传感器的设置使设备运行更安全、更精确、可控性强。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
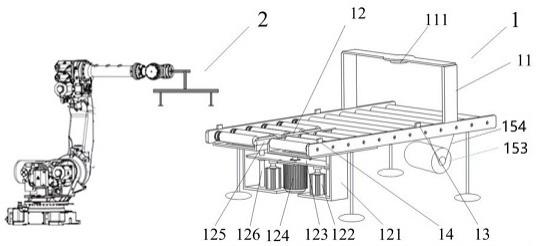
17.图1是本技术一种轮毂码垛装置的结构示意图。
18.图2是本技术一种轮毂码垛装置的送料辊道的输送轮毂状态示意图一。
19.图3是本技术一种轮毂码垛装置的送料辊道的输送轮毂状态示意图二。
20.图4是本技术一种轮毂码垛装置的送料辊道的俯视图。
21.图5是本技术一种轮毂码垛装置的送料辊道的左视图。
22.图6是本技术一种轮毂码垛装置的矩形拍子放4个轮毂的示意图。
23.图7是本技术一种轮毂码垛装置的矩形拍子放5个轮毂的示意图。
24.图8是本技术一种轮毂码垛装置的矩形拍子放6个轮毂的示意图。
25.其中:1
‑
送料辊道、2
‑
搬运机器人、3
‑
矩形拍子、11
‑
摄像头支架、111
‑
摄像头、12
‑
取料顶升组件、121
‑
顶升气缸托架、122
‑
顶升气缸、123
‑
升降板、124
‑
旋转电机、125
‑
顶升托架、126
‑
导向柱、13
‑
第一激光对射式光电传感器、14
‑
第二激光对射式光电传感器、15
‑
辊道支架、151
‑
短辊子、152
‑
长辊子、153
‑
驱动电机、154
‑
链条。
具体实施方式
26.本技术的说明书和权利要求书及所述附图中的术语“第一”、“第二”、“第三”和“第四”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
27.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
28.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
29.实施例1
30.本技术实施例1中提供了一种送料辊道,如图1
‑
4中所示,所述送料辊道1的出料端设置有取料顶升组件12,所述取料顶升组件12包括顶升气缸托架121、顶升气缸122、升降板123、旋转电机124、编码器、顶升托架125。所述送料辊道1的出料端下方垂直于输送方向的两侧左右对称设置有两个l型的顶升气缸托架121,两个所述顶升气缸托架121上对称设置有两个方向朝上的顶升气缸122。其中一个所述顶升气缸122的缸筒上端设置有上位磁电开关,其中一个所述顶升气缸122的缸筒下端设置有下位磁电开关。两个所述顶升气缸122的输出端均与所述升降板123固定连接,所述升降板123被两个所述顶升气缸122的活塞杆联合驱动,所述升降板123上固定有旋转电机124。所述升降板123的中心位置设置有转轴开口,所述升降板下表面位于转轴开口处固定有旋转电机124,所述旋转电机124的转轴穿过所述转轴开口方向朝上,所述旋转电机124的下方同轴设置有编码器,所述转轴的顶部固定有顶升托架125。两个所述顶升气缸托架121上分别固定设置一个导向柱126,两个导向柱126呈左右对称,所述升降板123上设置有两个左右对称的导向柱开口,两个所述导向柱开
口处均固定设置有竖直方向的导向套,两个所述导向套分别套设在两个所述导向柱126上,两个所述导向柱126的顶端均固定在所述辊道支架15的短辊子支撑架上。所述旋转电机124的转轴的顶部固定有顶升托架125,所述顶升托架125包括至少两个与所述送料辊道的输送方向垂直(即与长辊子152或者短辊子151平行)的横杆和穿过所述横杆中心处的纵杆。所述送料辊道1的出料端的中间位置设置有与所述顶升托架125形状匹配的缺口,所述顶升托架设置在所述缺口处。
31.所述送料辊道1包括辊道支架15、长辊子152、短辊子151、驱动电机153、链条154。所述辊道支架15上安装有若干个依次排列的辊子,送料辊道1的出料端的中间位置设置有与所述顶升托架125形状匹配的缺口,所述缺口的两侧安装有两排短辊子151,所述辊道支架15上安装有一排长辊子152,所述短辊子151和所述长辊子152平行。所述短辊子151和长辊子152上均设置有链轮,并且与两排所述短辊子151邻近的一根长辊子152为双链轮,该长辊子的两个链轮分别与紧挨的不同排的两个所述短辊子151的链轮通过链条传动连接。所述长辊子152的链轮之间以及所述短辊子151的链轮之间均通过链条154依次传动连接。所述辊道支架15上安装有用于链条驱动所述辊子转动的驱动电机153,所述驱动电机153的输出轴通过链条154连接所述送料辊道1的入料端的第一个所述长辊子152的链轮,所述驱动电机153能够通过链条154与链轮的配合驱动所述长辊子152和短辊子151转动。
32.本实施例1提供了一种送料辊道,所述送料辊道的出料端设置有取料顶升组件,所述取料顶升组件能将所述送料辊道上的轮毂顶升并旋转,并且设置编码器使旋转电机的旋转角度精确控制,能使送料辊道上的轮毂旋转一定的角度使轮毂码垛之后气门孔均朝外,并且靠近拍子的边缘,便于气门的安装,省略了产线上的调整气门孔位置的工序,提高了安装气门的效率。
33.实施例2:
34.本技术实施例2中提供了一种轮毂码垛装置,具体如图1
‑
6中所示,包括送料辊道1、控制单元、搬运机器人2和矩形拍子3。所述搬运机器人2是常用的六轴工业机器人,包括机器人底座、机械臂和抓手等。所述搬运机器人2能不改变轮毂的气门孔方向将所述轮毂拾取至所述矩形拍子3上的指定位置(例如a、b、c或d)。所述送料辊道1的入料端的上方架设有呈门型结构的摄像头支架11,所述摄像头支架11的两侧支脚固定安装在所述送料辊道1的两侧辊道支架15上,所述摄像头支架11的上方横梁的中心位置固定设置有方向朝下的摄像头111。
35.所述送料辊道1的出料端设置有取料顶升组件12,所述取料顶升组件12包括顶升气缸托架121、顶升气缸122、升降板123、旋转电机124、编码器、顶升托架125。所述送料辊道1的出料端下方垂直于输送方向的两侧左右对称设置有两个l型的顶升气缸托架121,两个所述顶升气缸托架121上对称设置有两个方向朝上的顶升气缸122。其中一个所述顶升气缸122的缸筒上端设置有上位磁电开关,其中一个所述顶升气缸122的缸筒下端设置有下位磁电开关。两个所述顶升气缸122的输出端均与所述升降板123固定连接,所述升降板123被两个所述顶升气缸122的活塞杆联合驱动,所述升降板123上固定有旋转电机124。所述升降板123的中心位置设置有转轴开口,所述升降板下表面位于转轴开口处固定有旋转电机124,所述旋转电机124的转轴穿过所述转轴开口方向朝上,所述旋转电机124的下方同轴设置有编码器,所述转轴的顶部固定有顶升托架125。两个所述顶升气缸托架121上分别固定设置
一个导向柱126,两个导向柱126呈左右对称,所述升降板123上设置有两个左右对称的导向柱开口,两个所述导向柱开口处均固定设置有竖直方向的导向套,两个所述导向套分别套设在两个所述导向柱126上,两个所述导向柱126的顶端均固定在所述辊道支架15的短辊子支撑架上。所述旋转电机124的转轴的顶部固定有顶升托架125,所述顶升托架125包括至少两个与所述送料辊道的输送方向垂直(即与长辊子152或者短辊子151平行)的横杆和穿过所述横杆中心处的纵杆。所述送料辊道1的出料端的中间位置设置有与所述顶升托架125形状匹配的缺口,所述顶升托架设置在所述缺口处。
36.所述送料辊道1包括辊道支架15、长辊子152、短辊子151、驱动电机153、链条154。所述辊道支架15上安装有若干个依次排列的辊子,送料辊道1的出料端的中间位置设置有与所述顶升托架125形状匹配的缺口,所述缺口的两侧安装有两排短辊子151,所述辊道支架15上安装有一排长辊子152,所述短辊子151和所述长辊子152平行。所述短辊子151和长辊子152上均设置有链轮,并且与两排所述短辊子151邻近的一根长辊子152为双链轮,该长辊子的两个链轮分别与紧挨的不同排的两个所述短辊子151的链轮通过链条传动连接。所述长辊子152的链轮之间以及所述短辊子151的链轮之间均通过链条154依次传动连接。所述辊道支架15上安装有用于链条驱动所述辊子转动的驱动电机153,所述驱动电机153的输出轴通过链条154连接所述送料辊道1的入料端的第一个所述长辊子152的链轮,所述驱动电机153能够通过链条154与链轮的配合驱动所述长辊子152和短辊子151转动。
37.所述送料辊道1的两侧辊道支架上位于所述摄像头支架11的后方设置有第一激光对射式光电传感器13。所述送料辊道1的两侧辊道支架上位于所述取料顶升组件12的后方设置有第二激光对射式光电传感器14。所述控制单元包括plc控制模块,所述控制单元电连接所述摄像头111、旋转电机124、编码器、上位磁电开关、下位磁电开关、所述顶升气缸122的电磁阀、所述第一激光对射式光电传感器13和所述第二激光对射式光电传感器14。所述摄像头111、编码器、上位磁电开关、下位磁电开关、所述第一激光对射式光电传感器13和所述第二激光对射式光电传感器14通过输入信号线连接所述plc模块的信号输入端,所述plc模块的信号输出端通过输出信号线连接所述旋转电机124和所述顶升气缸122的电磁阀。
38.本实施例2中一种轮毂码垛装置的码垛工作步骤如下:首先,所述驱动电机153启动,轮毂从所述送料辊道1的入料端放入并沿着所述送料辊道1输送;轮毂遮挡所述第一激光对射式光电传感器13,触发所述摄像头111采集轮毂图像;所述控制单元识别所述轮毂图像并计算得到当前轮毂放置到矩形拍子3的指定位置并且使气门孔靠近所述矩形拍子的边缘需要顺时针旋转的角度
ɵ
;轮毂遮挡所述第二激光对射式光电传感器14,所述驱动电机153停止,所述送料辊道1停止输送轮毂,两个所述顶升气缸122的活塞杆同时升起至顶端,所述控制单元接收所述上位磁电开关的触发信号,并触发所述旋转电机124顺时针转动角度
ɵ
;所述搬运机器人2采用不改变气门孔方向的拾取方式将轮毂拾取至所述矩形拍子3上的指定位置;两个所述顶升气缸122的活塞杆同时收缩至底端,所述控制单元接收所述下位磁电开关的触发信号,开启所述驱动电机153,所述送料辊道1开始输送下一个轮毂。
39.其中,所述角度
ɵ
为当前轮毂的气门孔与中心点连线和预定的轮毂零度基准线所成的顺时针角度。所述预定的轮毂零度基准线为将轮毂放置在矩形拍子上的所述指定位置后,轮毂上最接近所述拍子边沿的切点与轮毂中心点的连线。所述轮毂的气门孔与中心点连线的获取包括如下步骤:根据轮毂图像边缘图像灰度发生突变的特征,对所述摄像头采
集的轮毂图像进行轮毂部分截取,得到轮毂部分图像;根据摄像头的分辨率,建立所述轮毂部分图像的像素平面直角坐标系,并对所述轮毂部分图像的每个像素点进行坐标标定,同时计算每个像素点的灰度值、所述轮毂部分图像的平均灰度值以及每个像素点的灰度值与所述平均灰度值的灰度差值,并设定所述灰度差值的阈值;过滤轮辐间隙中所述灰度差值大于所述阈值的坐标点集,保留所述灰度差值大于所述阈值的两个圆形点集,并分别得出两个所述圆形点集的中心像素坐标,位于所述轮毂部分图像中心的像素坐标为轮毂中心孔坐标,位于所述轮毂部分图像边缘的像素坐标为气门孔坐标,根据轮毂的气门孔坐标和中心孔坐标即可得到轮毂的气门孔与中心点连线。由以上步骤得到所述轮毂的气门孔坐标和中心孔坐标,以及预定的轮毂零度基准线,设定轮毂的中心孔坐标为所述像素平面直角坐标系的原点,则根据气门孔的横、纵坐标,计算得到角度
ɵ
。
40.如图6中所示的矩形拍子3上设置4个轮毂放置位置a、b、c、d,当轮毂为一个矩形拍子上的编号a或b时,所述旋转电机顺时针转动α角度,当轮毂为一个拍子上的编号c或d时,所述旋转电机顺时针转动α+180角度。
41.本实施例2中提供了一种轮毂码垛装置,当待码垛的轮毂随物流辊道进入送料辊道后,摄像头对轮毂拍照进行图像采集,摄像头将轮毂的图片信息上传至plc,plc计算得到当前轮毂的气门孔与中心点连线,和预定的轮毂零度基准线所成的顺时针角度α,图像采集完成后,送料辊道将轮毂输送至取料顶升机构,随后plc触发两个顶升气缸的杠杆同时升起至顶端,顶升气缸的上位磁电开关触发信号后,plc触发旋转电机顺时针转动,当轮毂为一个拍子上的编号a或b时,旋转电机顺时针转动α角度,轮毂在顶升托架的带动下也顺时针转动α角度,当轮毂为一个拍子上的编号c或d时,旋转电机顺时针转动α+180角度,轮毂在顶升托架的带动下也顺时针转动α+180角度。完成后,机器人采用不改变气门孔方向的拾取方式将轮毂拾取至拍子上的对应编号位置。
42.本实用新型中,在码垛的每一层均按照这样的方式进行转动和排列,使每一层的a、b、c、d位置的轮毂气门孔均处于同一方位,并且靠近拍子的边缘。这样,汽车制造厂的工作人员无需费时寻找气门孔,只需要站在a位置的拍子边缘,自上而下就能够完成每层a位置轮毂气门的安装,同理可以轻松完成b、c、d位置的气门孔安装。因此,与现有技术相比,本实用新型具有气门安装方便、节约时间的特点。
43.在另一实施例中,如图7中所示,矩形拍子3上设置5个轮毂放置位置a、b、c、d、e,当轮毂为一个矩形拍子上的编号a或b时,所述旋转电机顺时针转动α角度,当轮毂为一个拍子上的编号c或d时,所述旋转电机顺时针转动α+180角度,拍子中间的e位置的轮毂可以随着顶升托架旋转α角度,也可以转动α+180角度。
44.在另一个实施例中,如图8中所示,矩形拍子3上设置6个轮毂放置位置a、b、c、d、e、f,当轮毂为一个矩形拍子上的编号a、b或c时,所述旋转电机顺时针转动α角度,当轮毂为一个拍子上的编号d、e或f时,所述旋转电机顺时针转动α+180角度。
45.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1