物品保管设备的制作方法
1.本发明涉及物品保管设备,所述物品保管设备具备输送容器的输送装置和对前述输送装置进行控制的控制装置,在构成保管场所的载置面载置将多个前述容器设为层积状态而构成的容器群并保管。
背景技术:
2.在日本特许第6347333号公报(专利文献1)中公开了这样的物品保管设备的一例。以下,在背景技术的说明中在括号内表示的附图标记是专利文献1的附图标记。
3.专利文献1所公开的物品保管设备具备输送装置(2),所述输送装置(2)进行:输送动作,用来相对于被载置在设定于设备地面的一定区域的载置面(1)的容器(c)从上方接近,将该容器(c)抬起;或输送动作,用来在该容器(c)之上载置其他容器(c)而将多个容器(c)设为层积状态。输送装置(2)通过使用来把持容器(c)的把持单元(7a、7b)在上下方向上升降,进行对于载置在载置面(1)的容器(c)的输送动作。载置容器(c)的载置面(1)理想地优选的是其全域为水平的平面。但是,实际上设置设备的房屋的地面及设置于其上的支承台上的面不是完全水平的平面,几乎都是载置面(1)的高度根据场所而稍稍不同的情况。在此情况下,根据成为输送对象的容器(c)被载置的部位,由输送装置(2)带来的把持单元(7a、7b)的最优的升降量不同。
4.所以,在专利文献1所公开的物品保管设备中,预先计测载置面(1)的多个部位的高度,基于该计测出的高度,根据载置面(1)上的位置,将由输送装置(2)带来的把持单元(7a、7b)的升降量修正。由此,即使在载置面(1)的高度根据场所而不同的情况下,也对于被配置在载置面(1)的哪个位置处的容器(c)都能够进行适当的输送动作。
技术实现要素:
5.发明要解决的课题可是,在载置有容器(c)的场所的载置面(1)倾斜的情况下,对应于该载置面(1)的倾斜,容器(c)也倾斜。在将多个容器(c)设为层积状态而构成的容器群被载置于那样倾斜的载置面(1)的情况下,随着朝向上方,相对于底面的水平方向的位置偏差变大。因此,在使由把持单元(7a、7b)对于容器(c)的水平方向的把持位置在下方的容器(c)和上方的容器(c)中相同的情况下,有可能不能进行适当的输送动作。但是,在专利文献1中,关于这一点没有特别公开。
6.鉴于上述实际情况,希望实现一种即使在将多个容器设为层积状态而构成的容器群被倾斜载置于载置面的情况下也能够对该容器群进行适当的输送动作的物品保管设备。
7.用来解决课题的手段有关本公开的物品保管设备,具备输送容器的输送装置和对前述输送装置进行控制的控制装置,在构成保管场所的载置面,载置将多个前述容器设为层积状态而构成的容器群并保管,前述控制装置具备存储部;将由前述载置面构成的理想的平面设为基准面,将
沿着前述基准面且相互正交的方向设为x方向及y方向,将与前述基准面正交的方向设为z方向;在前述存储部,存储有表示前述载置面的多个部位各自的前述x方向、前述y方向及前述z方向的实际的位置的坐标信息、表示前述容器的沿着前述x方向及前述y方向的底面的尺寸的底面尺寸信息、表示前述容器的沿着前述z方向的高度的高度尺寸信息、表示前述容器群的前述载置面上的前述x方向及前述y方向的位置的容器群位置信息、和表示作为构成前述容器群的前述容器的数量的层积数的层数信息;前述输送装置具备把持单个前述容器或多个层积状态的前述容器的把持部、使前述把持部在前述x方向及前述y方向上移动的移动机构、和使前述把持部沿着前述z方向升降的升降机构;前述控制装置进行基于存储于前述存储部的前述坐标信息、前述底面尺寸信息和前述容器群位置信息求出作为载置于前述载置面的前述容器群相对于前述z方向的倾斜的载置倾斜的倾斜运算处理,以及基于前述容器群位置信息、前述载置倾斜和前述高度尺寸信息求出表示构成前述容器群的各层的前述容器的前述x方向及前述y方向的位置的个别位置信息的个别位置运算处理,基于前述个别位置信息对前述移动机构进行控制。
8.根据本结构,在载置面的某个场所载置有容器群的情况下,根据关于该容器群的容器群位置信息和底面尺寸信息,能够掌握该容器群的底面在载置面占据的区域的位置及尺寸。除此以外,由于在存储部存储有载置面的多个部位各自的坐标信息,更详细地讲存储有表示多个部位各自的x方向、y方向及z方向的实际的位置的信息,所以基于这些信息,能够求出作为载置于载置面的容器群的相对于z方向的倾斜的载置倾斜。这里,载置倾斜成为作为容器群整体的倾斜,但作为x方向及y方向的位置,随着朝向上方而相对于容器群的底面的x方向及y方向的位置的偏差变大。根据本结构,进行基于上述的载置倾斜、容器群位置信息和构成该容器群的各层的容器1个1个的高度尺寸信息求出表示各层的容器的x方向及y方向的位置的个别位置信息的个别位置运算处理。由此,能够将关于构成容器群的各层的容器各自的x方向及y方向的实际的位置作为个别位置信息掌握。而且,通过基于该个别位置信息对移动机构进行控制,能够根据构成容器群的各层的容器各自的实际的x方向及y方向的位置,高精度地使把持部移动而进行输送动作。因而,根据本结构,即使在将多个容器设为层积状态而构成的容器群被倾斜载置于载置面的情况下,也能够对于该容器群进行适当的输送动作。
9.有关本公开的技术的进一步的特征和优点,通过参照附图记述的以下的例示性且非限定性的实施方式的说明应该会变得更明确。
附图说明
10.图1是物品保管设备的概略立体图。
11.图2是表示把持部的动作的图。
12.图3是表示把持部的动作的图。
13.图4是表示由把持部进行的容器的把持状态的图。
14.图5是物品保管设备的控制框图。
15.图6是表示计测载置面的x方向上的各地点的高度的状况的图。
16.图7是表示计测载置面的y方向上的各地点的高度的状况的图。
17.图8是示意地表示载置面的倾斜的图。
18.图9是表示计测载置面的各地点的高度的计测结果的图。
19.图10是表示容器群不倾斜的情况下的各容器的个别位置与把持部的把持基准点的关系的图。
20.图11是表示容器群倾斜的情况下的各容器的个别位置与把持部的把持基准点的关系的图。
21.图12是表示容器群底面区域中的多个部位的坐标信息的图。
22.图13是表示运算修正值的情况下的一例的说明图。
23.图14是表示按照修正值将把持基准点修正的情况下的把持部的动作的图。
24.图15是针对多个高度区的每个运算共同的修正值的情况下的说明图。
具体实施方式
25.参照附图对有关本实施方式的物品保管设备进行说明。如图1所示,物品保管设备100具备输送容器c的输送装置1和对输送装置1进行控制的控制装置2(参照图5)。物品保管设备100构成为,在构成保管场所的载置面f上载置将多个容器c设为层积状态而构成的容器群cg并保管。在物品保管设备100中,将收容有零件等的容器c或没有收容零件等的空的容器c作为物品保管。
26.以下,将由载置面f构成的理想的平面设为基准面fs,将沿着基准面fs且相互正交的方向设为x方向及y方向,将与基准面fs正交的方向设为z方向。基准面fs是沿着水平面的理想的假想面。因而,沿着该基准面fs的x方向及y方向是沿着水平方向的方向,与该基准面fs正交的z方向是沿着铅直方向(上下方向)的方向。另外,实际上,设置物品保管设备100的房屋的地面及被设置在其上的支承台上的面不是完全水平的平面。因而,实际的载置面f与基准面fs不同,根据场所而高度(z方向的位置)稍稍不同。
27.如图1~图3所示,输送装置1具备把持单个容器c或多个层积状态的容器c的把持部101、使把持部101在x方向及y方向上移动的移动机构11、和使把持部101沿着z方向升降的升降机构12。
28.在本实施方式中,移动机构11具备在载置面f的在x方向上离开的位置被沿着y方向配置并且被固定于该载置面f的一对固定导轨11r、被一对固定导轨11r支承并且使把持部101沿着y方向移动的y方向移动体11y、和被y方向移动体11y支承并使把持部101沿着x方向移动的x方向移动体11x。
29.在本实施方式中,y方向移动体11y由沿着x方向延伸的可动轨道构成。在图示的例子中,可动轨道具备相互平行地配置的一对轨道部11ya。y方向移动体11y的x方向上的两端部的各自相对于固定导轨11r移动自如地被支承,y方向移动体11y沿着该固定导轨11r在y方向上移动。y方向移动体11y被例如由马达等构成的y方向移动驱动部(未图示)驱动。
30.在本实施方式中,x方向移动体11x由在构成y方向移动体11y的可动轨道上行驶的台车构成。x方向移动体11x通过沿着沿x方向延伸的y方向移动体11y行驶,沿着x方向移动。x方向移动体11x被例如由马达等构成的x方向移动驱动部(未图示)驱动。
31.把持部101被x方向移动体11x支承。因此,通过x方向移动体11x沿着x方向移动,被该x方向移动体11x支承的把持部101也沿着x方向移动。此外,如上述那样,该x方向移动体11x被y方向移动体11y支承。因此,通过y方向移动体11y沿着y方向移动,被x方向移动体11x
支承的把持部101也沿着y方向移动。这样,把持部101构成为能够沿着x方向及y方向移动。
32.升降机构12构成为,使把持部101沿着z方向升降,在本例中,被x方向移动体11x支承。详细的图示省略,但升降机构12具备与把持部101连结的带和将带驱动的升降驱动部(未图示)。升降驱动部例如由马达等构成。通过由升降驱动部将带驱动,把持部101在z方向上升降。这样,在本实施方式中,把持部101经由升降机构12被x方向移动体11x支承。
33.在本实施方式中,输送装置1具备把持机构10。把持机构10具备上述的把持部101和将把持部101驱动的把持驱动部(未图示)。把持驱动部例如由马达等构成。把持部101构成为,被把持驱动部驱动,状态变化为用来把持容器c的把持状态和用来不把持容器c的非把持状态。
34.如图2及图3所示,在本实施方式中,把持部101具备在x方向上相互接近或离开的一对把持单元101u。一对把持单元101u的各自经由升降机构12被x方向移动体11x支承,以在y方向移动体11y的一对轨道部11ya之间同步地升降。一对把持单元101u的各自具备在y方向上排列配置并且在y方向上相互接近或离开的一对定位工具101a、和配置于在y方向上排列的一对定位工具101a之间的把持工具101b。
35.在本实施方式中,定位工具101a构成为,在把持部101的把持状态下从外侧相对于容器c的外缘接触而进行该容器c的定位。在本例中,在一对把持单元101u的各自具备的一对定位工具101a、即合计4个定位工具101a构成为,对于俯视下的形状呈矩形的容器c的四角接触。在图示的例子中,多个定位工具101a其沿着水平面的截面的形状被构成为l字状的柱状体,以与容器c的四角各自的外缘形状一致。
36.在本实施方式中,把持工具101b构成为,将在容器c的上端部外缘遍及整周伸出的凸缘状的被把持部cr把持。在本例中,如图4所示,把持工具101b具备在把持部101的把持状态下与容器c的被把持部cr卡合的多个突出体101p和支承多个突出体101p的支承部件101s。
37.在本实施方式中,支承部件101s被形成为沿着z方向延伸的柱状,在其下端部区域中支承多个突出体101p。被支承部件101s支承的多个突出体101p在该支承部件101s的下端部区域中在z方向上排列而配置,并且朝向在x方向上对置配置的另一方的支承部件101s侧(内侧)突出。在本例中,在z方向上排列的多个突出体101p在y方向上排列配置有多列(在图2所示的例子中是2列)。
38.多个突出体101p的各自被弹簧在向内侧(另一方的支承部件101s侧)突出的方向上施力。因而,如图4所示,在把持部101的把持状态下,多个突出体101p的一部分通过受到来自容器c的被把持部cr的反作用力,克服弹簧的力向外侧退缩,被配置在比退缩的一部分的突出体101p靠下方的另一部分的突出体101p成为将容器c的被把持部cr从下方支承的状态。此外,在该状态下,定位工具101a相对于容器c的外缘从外侧接触或向外侧接近,将该容器c在x方向及y方向上定位(参照图3)。
39.将成为由把持部101把持容器c的基准的点设为把持基准点10p(参照图4)。把持基准点10p是被把持部101包围的区域的x方向及y方向的中心位置,是与把持部101的z方向的基准位置对应的位置。在本实施方式中,在x方向上对置的一对把持工具101b的中间位置是被把持部101包围的区域的x方向的中心位置。而且,在各把持单元101u中在y方向上排列的一对定位工具101a的中间位置是被把持部101包围的区域的y方向的中心位置。此外,一对
把持部101的各自的配置有多个突出体101p的区域的z方向的中间位置是把持部101的z方向的基准位置。这里,通过这样决定的x方向、y方向及z方向的各位置,决定了把持基准点10p。输送装置1成为以下的结构:通过将把持部101的把持基准点10p的x方向的位置、y方向的位置及z方向的位置与构成容器群cg的各层的容器c的x方向的位置、y方向的位置及z方向的位置对准,如图3所示,在把持着作为把持对象的1个容器c的状态下将单个或多个容器c输送。
40.图2及图3表示输送装置1从由7个容器c构成的容器群cg将上部3个容器c取出并输送的例子。输送装置1能够从容器群cg将单个或多个容器c分离并输送。此外,输送装置1能够向容器群cg的上方载置堆积输送来的其他的单个或多个容器c。
41.这里,成为输送装置1的输送对象及被向载置面f载置的对象的容器c能够跨越多层堆积而设为层积状态。如上述那样,在本实施方式中,容器c在俯视中被形成为矩形,但并不限于此,容器c也可以在俯视中被形成为矩形以外的多边形、圆形或椭圆形。此外,在本实施方式中,如图1所示,能够将底面的尺寸及高度的至少一方不同的多个种类的容器c保管到载置面f。在本例中,如图1所示,将多个容器c设为层积状态而构成的容器群cg的各自由底面的尺寸及高度相同的同种类的容器c构成。但是,只要能够堆积,也可以由相互不同的多个种类的容器c构成容器群cg。这样的容器c例如为用来收容在工厂的制造线中使用的零件等的塑料制的容器。此外,例如输送装置1也作为用来将收容有零件等的容器c或没有收容零件等的空的容器c在与物品保管设备100的外部之间入出库的入出库装置发挥功能。在物品保管设备100中,将这样的收容有零件等的容器c或没有收容零件等的空的容器c作为物品保管。
42.如图5所示,控制装置2构成为,能够在与输送装置1之间进行通信,能够对输送装置1进行控制。此外,控制装置2总括地管理物品保管设备100的整体。在本实施方式中,控制装置2管理被载置于载置面f的容器群cg的位置、构成容器群cg的容器c的种类及构成容器群cg的容器c的数量(层积数)。另外,在本实施方式中,控制装置2在容器c被以单体载置于载置面f的情况下,也作为构成容器群cg的容器c的数量(层积数)为“1”的容器群cg管理。控制装置2例如具备微型计算机等处理器、存储器等周边电路等。而且,通过这些硬件与在计算机等处理器上执行的程序的协作,实现各功能。
43.控制装置2具备运算部21和存储部22。在存储部22中,存储有表示载置面f的多个部位各自的x方向、y方向及z方向的实际的位置的坐标信息ic、表示容器c的沿着x方向及y方向的底面的尺寸的底面尺寸信息is、表示容器c的沿着z方向的高度ch(参照图13)的高度尺寸信息ih、表示容器群cg的载置面f上的x方向及y方向的位置(容器群位置cgp)的容器群位置信息icgp、和表示作为构成容器群cg的容器c的数量的层积数的层数信息in。在本实施方式中,容器群位置信息icgp表示的容器群位置cgp,是作为容器群cg的最下层的容器c的底面的容器群底面cgb的载置面f上的x方向及y方向的位置。这里,将与容器群底面cgb的重心位置(图形的重心的位置)对应的载置面f上的位置设为容器群位置cgp。此外,在本实施方式中,容器群cg以俯视形状为矩形的容器c的某个边与x方向平行的方式被配置于载置面f。由此,容器群位置信息icgp不包含相对于x方向及y方向的角度的信息。另外,在容器c的某个边相对于x方向倾斜而配置那样的情况下,优选的是在容器群位置信息icgp中包含相对于x方向及y方向的角度的信息。而且,运算部21构成为,基于这些信息执行后述的倾斜运
算处理和个别位置运算处理。另外,容器c的沿着z方向的高度ch,是指容器c被载置于基准面fs的状态下的高度ch,也可以改称作容器c的高度尺寸ch。
44.在本实施方式中,进行预先计测载置面f的各地点(多个部位)处的z方向的实际的位置的计测作业,将通过计测作业计测出的计测值作为坐标信息ic存储于存储部22。在该计测作业中,如图6及图7所示,在x方向移动体11x上临时性地安装计测到载置面f的垂直距离的计测装置3。如上述那样,x方向移动体11x能够自己沿着x方向移动,并且还能够经由y方向移动体11y的移动而在y方向上移动。被安装在那样的x方向移动体11x上的计测装置3计测载置面f的各地点处的到载置面f的垂直距离。通过该垂直距离的计测,计测载置面f的x方向及y方向的各地点处的z方向的实际的位置(高度),取得表示载置面f的各地点的x方向、y方向及z方向的实际的位置的坐标信息ic。另外,作为计测装置3,可以使用利用激光或超声波的距离传感器、或其他的公知的计测装置。
45.图8是将载置面f的各地点处的高度形象化的图。在图中,越是被较浓地涂色的区域表示越高的位置,越是被较淡地涂色的区域表示越低的位置。这样,实际的载置面f与被设为理想的平面的基准面fs不同,根据场所而高度(z方向的位置)稍稍不同。图中的矩形的虚线表示被载置于载置面f的容器c的底面,更详细地讲,表示作为构成容器群cg的最下层的容器c的底面的容器群底面cgb。在图8中表示的两个容器群底面cgb中的一方被配置在载置面f的相同高度的区域(平面),在此情况下,容器群cg成为以适当的姿势被载置于载置面f的状态(不倾斜的状态)(参照图10)。此外,在图8中表示的两个容器群底面cgb中的另一方跨载置面f的相互高度不同的区域而配置,在此情况下,容器群cg成为以倾斜的姿势被载置于载置面f的状态(参照图11)。
46.图9表示载置面f的一部分处的各地点的计测结果。在图9中,在小框内表示的数值,是将设基准面fs的高度为“0”的情况下的载置面f的各地点处的高度例如以毫米单位表示的值。在本实施方式中,将载置面f划区为多个单位划区a,针对多个单位划区a的每个计测z方向的位置。而且,多个单位划区a各自的x方向的位置、y方向的位置及z方向的位置被作为坐标信息ic存储于上述的存储部22。
47.如图10所示,在容器群cg之上再堆积容器c的情况下,在容器群cg被以适当的姿势即不倾斜的姿势载置于载置面f的状态下,移动机构11将把持部101的把持基准点10p的x方向及y方向的位置相对于作为载置面f上的容器群cg的x方向及y方向的位置的容器群位置cgp对准。这里,把持部101的把持基准点10p与被把持部101把持的容器c的被把持部cr的外缘形状的重心位置(图形的重心的位置)一致。另外,在本实施方式中,作为构成容器群cg的各层的容器c的x方向及y方向的位置的个别位置cp也设为容器c的被把持部cr的外缘形状的重心位置(图形的重心的位置)。此外,如上述那样,在本实施方式中,与容器群底面cgb的重心位置对应的载置面f上的位置成为容器群位置cgp。如图10所示,在容器群cg被以适当的姿势载置于载置面f的状态下,作为构成容器群cg的各层的容器c的x方向及y方向的位置的个别位置cp和容器群位置cgp在x方向及y方向上被配置在相同的位置。如果由移动机构11进行的x方向及y方向的对位完成,则升降机构12对准于构成容器群cg的最上层的容器c的高度而使把持部101下降。更具体地讲,升降机构12使把持部101下降,以使把持部101的把持基准点10p与在构成容器群cg的最上层的容器c之上假定再堆积1层的容器c(在图中用假想线表示)的个别位置cp重合。另外,在将构成容器群cg的一部分的容器c把持并输送的
情况下,对准于构成容器群cg的各层的容器c中的被指定为把持对象的容器c被配置的高度而使把持部101下降。在此情况下,升降机构12使把持部101下降,以使把持部101的把持基准点10p与成为把持对象的容器c的个别位置cp重叠。
48.这样,在容器群cg被以适当的姿势载置于载置面f的状态下,通过由移动机构11使把持基准点10p的x方向及y方向的位置对准于由容器群位置信息icgp表示的容器群位置cgp,能够将把持部101的x方向及y方向的位置相对于构成容器群cg的各层的容器c对准。但是,如图11所示,在容器群cg被以倾斜的姿势载置于载置面f的状态下,构成容器群cg的各层的容器c的个别位置cp和由容器群位置信息icgp表示的容器群位置cgp在x方向及y方向的至少一方上偏差。特别是,随着朝向容器群cg的上方,容器c的个别位置cp和容器群位置cgp的x方向及y方向的位置偏差变大。因此,在容器群cg被以倾斜的姿势载置的情况下,即使由移动机构11进行了把持基准点10p和容器群位置cgp的x方向及y方向的对位,也在构成容器群cg的各层的容器c的个别位置cp和把持基准点10p的x方向及y方向的位置间发生偏差。在这样的情况下,难以在构成容器群cg的最上层的容器c之上再堆积1层其他的容器c,此外,在将容器群cg的一部分输送时难以将各容器c用把持部101适当地把持。
49.所以,控制装置2进行运算构成容器群cg的各层的容器c的个别位置cp和由容器群位置信息icgp表示的容器群位置cgp的x方向及y方向的位置偏差量作为修正值cv的修正值运算处理。作为该修正值运算处理,控制装置2如图12及图13所示,进行基于存储于存储部22的坐标信息ic、底面尺寸信息is和容器群位置信息icgp求出作为载置于载置面f的容器群cg相对于z方向的倾斜的载置倾斜θ的倾斜运算处理,以及基于容器群位置信息icgp、载置倾斜和高度尺寸信息ih求出表示构成容器群cg的各层的容器c的x方向及y方向的位置(个别位置cp)的个别位置信息的个别位置运算处理。然后,控制装置2基于通过个别位置运算处理求出的个别位置信息,对移动机构11进行控制。换言之,控制装置2将作为构成容器群cg的各层的容器c的x方向及y方向的位置的个别位置cp和由容器群位置信息icgp表示的容器群位置cgp的x方向及y方向的相对距离(位置偏差量)作为修正值cv,按照该修正值cv和由容器群位置信息icgp表示的容器群位置cgp,对移动机构11进行控制。
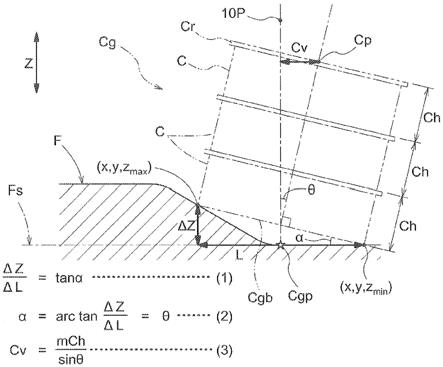
50.以下,参照图12及图13,对求出载置倾斜θ的倾斜运算处理以及求出容器c的个别位置cp的个别位置运算处理进行说明。另外,在图11、图13等中,将载置倾斜θ比实际大地强调表示。
51.如图12所示,在倾斜运算处理中,控制装置2基于容器群位置信息icgp和底面尺寸信息is,求出容器群底面区域af,所述容器群底面区域af是作为容器群cg的最下层的容器c的底面的容器群底面cgb在x方向及y方向上占据的载置面f上的区域,基于与容器群底面区域af对应的多个部位的载置面f的坐标信息ic,求出容器群底面cgb的多个部位的z方向的位置。然后,基于容器群底面cgb的多个部位的z方向的位置,求出作为容器群底面cgb的倾斜的底面倾斜α,基于该底面倾斜α,求出载置倾斜θ。
52.如上述那样,在存储部22,存储有表示容器群位置cgp的容器群位置信息icgp和表示容器c的底面尺寸的底面尺寸信息is。控制装置2利用这些信息,求出与容器群底面区域af对应的多个部位,例如与矩形的容器群底面cgb的四角对应的部位的坐标(参照图12)。如上述那样,在本实施方式中,容器群cg以俯视形状为矩形的容器c的某个边与x方向平行的方式被配置于载置面f。此外,容器群位置cgp被设定在容器群底面cgb的重心位置。因此,根
据容器群位置cgp和底面尺寸信息is,能够求出容器群底面cgb的四角的坐标。另外,并不限于此,也可以求出包含在容器群底面区域af的3个部位以上的坐标。只要能够求出包含在容器群底面区域af的3个部位以上的坐标,就能够求出作为容器群底面cgb的倾斜的底面倾斜α。
53.例如如图13所示,作为容器群cg相对于z方向的倾斜的载置倾斜θ等于作为容器群底面cgb相对于基准面fs的倾斜的底面倾斜α。而且,底面倾斜α能够根据在如上述那样求出的包含在容器群底面区域af的3个部位以上的坐标、在本例中根据容器群底面cgb的四角的坐标来求出。这是因为,三维空间中的平面的姿势由包含在该平面的3点的坐标决定。在图13中,为了说明的简略化,设想仅有二维空间内的倾斜的状况而进行说明。在图示的例子中,通过容器c的底面与载置面f接触的多个接触点中的、被配置在最高位置的接触点和被配置在最低位置的接触点的z方向的高度的差δz和沿着x-y平面的方向的相对距离δl,根据以下的(1)式和(2)式求出底面倾斜α。
54.δz/δl=tanα
ꢀꢀ・・・・・・・・
(1)α=arctanδz/δl=θ
ꢀꢀ・・・
(2)这里,底面倾斜α和载置倾斜θ成为相同的值。这样,在本实施方式中,在倾斜运算处理中,基于容器群底面cgb的多个部位的z方向的位置求出作为容器群底面cgb的倾斜的底面倾斜α,基于该底面倾斜α,求出载置倾斜θ。另外,运算部21实际上在倾斜运算处理中,基于包含在容器群底面区域af的3个部位以上的坐标,求出x-y-z的三维空间内的底面倾斜α,根据该底面倾斜α求出载置倾斜θ。
55.在个别位置运算处理中,基于如上述那样求出的载置倾斜θ、表示容器群位置cgp的容器群位置信息icgp和表示容器c的高度尺寸ch的高度尺寸信息ih,运算构成容器群cg的各层的容器c的个别位置cp。如上述那样,在存储部22,存储有表示容器c的高度尺寸ch的高度尺寸信息ih、和表示作为构成容器群cg的容器c的数量的层积数n的层数信息in。控制装置2基于这些信息,能够取得与容器群底面cgb正交的方向上的从该容器群底面cgb到各层的容器c的上端部的距离的信息。如上述那样,在容器c的上端部,形成有被把持部101把持的被把持部cr。所以,在本实施方式中,将各层的容器c的被把持部cr的x方向及y方向的位置设为该容器c的个别位置cp。如上述那样,在本实施方式中,将被把持部cr的外缘形状的重心位置(图形的重心的位置)设为个别位置cp。
56.而且,表示被把持部cr的位置的个别位置cp和由容器群位置信息icgp表示的容器群位置cgp的x方向及y方向的位置偏差量,成为用来将把持基准点10p相对于由容器群位置信息icgp表示的容器群位置cgp在x方向及y方向上修正的修正值cv。该修正值cv通过以下的(3)式求出。
57.cv=m
・
ch/sinθ
ꢀꢀ・・・・・・
(3)“ch”表示容器c的高度尺寸。“m”表示成为由把持部101进行的把持的对象的容器c被配置的层数(从下起第m层),被设为构成容器群cg的容器c的层积数n以下的自然数。在图13中,表示了在由3层的容器c构成的容器群cg中运算从下起第3层容器c的个别位置cp的情况的例子。如上述那样,载置倾斜θ被作为三维空间内的倾斜求出,但在本例中,为了说明的简略化,设想仅有x-z平面或y-z平面的某个二维空间内的倾斜的状况而进行说明。在此情况下,修正值cv成为x方向或y方向的某个值。即使在载置倾斜θ是x-y-z的三维空间内
的倾斜的情况下,也可以通过分解为x-z平面或y-z平面各自的倾斜,同样求出x方向及y方向各自的修正值cv。
58.基于如以上这样求出的修正值cv和由容器群位置信息icgp表示的容器群位置cgp,求出构成容器群cg的各层的容器c的个别位置cp。具体而言,将由容器群位置cgp表示的容器群底面cgb的x方向及y方向的位置通过与各层的容器c的层数m对应的x方向及y方向的修正值cv修正后的x方向及y方向的位置,成为各层的容器c的个别位置cp。如果这样求出个别位置cp,则控制装置2如图14所示,基于该个别位置cp对移动机构11进行控制。即,控制装置2对移动机构11进行控制,以将把持部101的把持基准点10p的x方向及y方向的位置对准于在成为对象的容器群cg的最上层的容器c之上再堆积1层的情况下的该追加层的容器c(在图中用假想线表示)的个别位置cp。图14图示了在由4层的容器c构成的容器群cg之上再堆积1层容器c的状况。在此情况下,控制装置2对准于向作为最上层的从下起第4层容器c之上堆积的作为追加层的第5层容器c的个别位置cp,使把持部101在x方向及y方向上移动。通过将移动机构11这样控制,能够在既有的容器群cg之上再适当地堆积1个容器c。
59.此外,控制装置2如上述那样求出各层的容器c的个别位置cp,并且基于存储于存储部22的坐标信息ic、高度尺寸信息ih和容器群位置信息icgp,求出表示构成容器群cg的各层的容器c的z方向的位置的个别高度信息。在本实施方式中,控制装置2将由与容器群位置cgp的x方向及y方向的位置对应的载置面f的坐标信息ic(x方向、y方向及z方向的位置)表示的z方向的位置识别为该容器群cg的容器群底面cgb的高度hb。然后,控制装置2通过对该容器群底面cgb的高度hb根据容器c的层数而加上高度尺寸ch(参照图13),求出表示构成容器群cg的各层的容器c的个别高度hp的个别高度信息。
60.而且,控制装置2如上述那样,对移动机构11进行控制,以将把持部101的把持基准点10p的x方向及y方向的位置对准于假定为堆积到成为对象的容器群cg的最上层的容器c之上的追加层的容器c的个别位置cp。然后,控制装置2使升降机构12进行使把持部101向与该追加层的容器c的个别高度hp对准的高度下降的下降动作。由此,使把持部101移动到由个别位置cp表示的x方向及y方向的位置且由个别高度hp表示的z方向的位置,将把持部101把持着的容器c堆积到成为对象的容器群cg的最上层的容器c之上。在图14所示的例子中,由于在由4层容器c构成的容器群cg之上堆积作为追加层的第5层容器c,所以在对准于该第5层容器c的个别位置cp而使把持部101在x方向及y方向上移动后,对准于该第5层容器c的个别高度hp而使把持部101在z方向上下降,将把持部101把持着的容器c向容器群cg的作为最上层的第4层的容器c之上堆积。这样,根据本实施方式,能够根据构成容器群cg的各层的容器c各自位于的实际的位置及高度,使把持部101移动到适当的位置,适当地将容器c堆积。
61.另外,即使在用把持部101将构成成为对象的容器群cg的一部分的容器c把持并输送的情况下,也能够使用如上述那样求出的个别位置cp及个别高度hp,适当地将容器c用把持部101把持。在此情况下,控制装置2在对移动机构11进行控制以将把持部101的把持基准点10p的x方向及y方向的位置对准于成为把持对象的容器c的个别位置cp之后,使升降机构12进行使把持部101下降到对准于成为把持对象的容器c的个别高度hp的高度的下降动作。由此,使把持部101移动到由个别位置cp表示的x方向及y方向的位置且由个别高度hp表示的z方向的位置,使把持机构10进行将成为对象的容器c把持的把持动作。例如,在由4层的
容器c构成的容器群cg的从下起第4层的容器c被作为把持对象的情况下,在对准于该第4层容器c的个别位置cp而使把持部101在x方向及y方向上移动之后,对准于该第4层的容器c的个别高度hp而使把持部101在z方向上下降,将该第4层容器c用把持部101把持。这样,根据本实施方式,能够根据构成容器群cg的各层的容器c各自位于的实际的位置及高度,使把持部101移动到适当的位置,适当地把持容器c。
62.根据以上说明的物品保管设备100,即使在将多个容器c设为层积状态而构成的容器群cg被倾斜载置于载置面f的情况下,也能够将把持部101把持的容器c堆积到该容器群cg之上,或将构成该容器群cg的一部分的容器c用把持部101把持而输送。即,根据上述的物品保管设备100,能够对于被倾斜载置于载置面f的容器群cg进行适当的输送动作。
63.如上述那样,在本实施方式中,载置面f构成为,能够将多个容器群cg在x方向及y方向上排列配置。在本例中,在存储部22存储有关于被载置于载置面f的多个容器群cg的各自的容器群位置信息icgp和关于多个容器群cg的各自的层数信息in。而且,倾斜运算处理及个别位置运算处理以被控制装置2选择为输送对象的容器群cg为对象进行。
64.此外,如上述那样,在本实施方式中,载置面f构成为,能够配置底面的尺寸及高度ch的至少一方不同的多个种类的容器c。在本例中,在存储部22,存储有关于底面的尺寸及高度ch的至少一方不同的多个种类的容器c的各自的底面尺寸信息is及高度尺寸信息ih、和表示构成容器群cg的容器c的种类的种类信息。而且,控制装置2基于关于选择为输送对象的容器群cg的种类信息,从存储部22取得底面尺寸信息is及高度尺寸信息ih。即,在本实施方式中,控制装置2根据构成成为输送对象的容器群cg的容器c的种类,进行倾斜运算处理和个别位置运算处理。
65.这样,根据本实施方式,即使是在载置面f载置有多个容器群cg的情况、以及构成载置于载置面f的容器群cg的容器c的种类有多个的情况,也能够匹配于各个容器群cg适当地进行倾斜运算处理及个别位置运算处理,对各个容器群cg进行适当的输送动作。但是,由于根据容器群cg被载置的场所而载置面f的倾斜较大,所以有载置倾斜θ成为较大的值的情况。在此情况下,容易发生由输送装置1带来的输送动作的错误。所以,在本实施方式中,控制装置2基于存储于存储部22的坐标信息ic和底面尺寸信息is,将载置倾斜θ成为规定值以上的载置面f上的区域设定为禁止载置容器群cg的禁止区域。规定值可以基于把持部101的把持构造及被载置于载置面f的容器群cg的稳定性等通过实验等设定。这样的规定值例如可以设定为相对于铅直方向的倾斜为3
°
以上等。通过上述结构,能够设为仅载置倾斜θ不到规定值的容器群cg被载置于载置面f的状态。禁止区域例如可以作为用于作业者进行作业的作业区或作业者的通路利用。
66.此外,在没有被设定为禁止区域的载置面f的区域中,根据容器群cg的高度即与容器群底面cgb正交的方向上的容器群cg的尺寸和载置倾斜θ,也有可能不能充分确保容器群cg的稳定性。与容器群底面cgb正交的方向上的容器群cg的尺寸基于构成容器群cg的各层的容器c的高度尺寸ch和容器群cg的层积数n决定。所以,在本实施方式中,控制装置2也可以基于载置倾斜θ和构成容器群cg的各层的容器c的高度尺寸ch,限制被载置于载置面f的容器群cg的层积数n。例如,可以基于高度尺寸ch设定层积数n的上限,以随着载置倾斜θ变大而容器群cg的高度的上限变低。进而,根据容器c的形状等,也有容器群cg的稳定性不同的情况。在此情况下,控制装置2优选的是也基于表示容器c的种类的种类信息来限制容器
群cg的层积数n。而且,优选的是考虑基于根据容器c的种类而不同的容器底面的尺寸决定的底面倾斜α、或根据容器c的种类而不同的高度尺寸ch,如上述那样限制容器群cg的层积数n。
67.〔其他实施方式〕接着,对物品保管设备的其他实施方式进行说明。
68.(1)在上述的实施方式中,对于控制装置2对构成容器群cg的各层的容器c的各自求出个别位置cp及修正值cv的例子进行了说明。但是,本技术并不限定于这样的例子。如图15所示,控制装置2也可以将容器群cg的z方向的全域在z方向上划分为多个高度区ah,在个别位置运算处理中针对每个高度区ah求出个别位置信息作为共同的值。即,控制装置2也可以针对每个高度区ah求出个别位置cp及修正值cv。由此,不是对于构成容器群cg的各层的容器c的各自求出个别位置cp,而是针对每个高度区ah作为共同的值而求出个别位置cp,所以能够减少求出个别位置cp的数量,减轻控制装置2的运算负荷。在图15所示的例子中,由15层容器c构成的容器群cg被载置于载置面f,针对每5层划分高度区ah1~ah3。而且,控制装置2例如将高度区ah的z方向的中间位置设为被配置于该高度区ah的多个容器c(在图示的例子中是5个容器c)整体的个别位置cp,求出与该个别位置cp对应的修正值cv。在图示的例子中,控制装置2对于多个高度区ah1~ah3的各自求出个别位置cp1~cp3和修正值cv1~cv3。
69.(2)在上述的实施方式中,以以下的结构为例进行了说明:控制装置2基于存储于存储部22的坐标信息ic、高度尺寸信息ih和容器群位置信息icgp,求出表示作为构成容器群cg的各层的容器c的z方向的位置的个别高度hp的个别高度信息,基于该个别高度信息对升降机构12进行控制。但是,并不限定于这样的结构。例如,也可以除了坐标信息ic、高度尺寸信息ih和容器群位置信息icgp以外,还基于通过倾斜运算处理求出的载置倾斜θ,求出表示构成容器群cg的各层的容器c的个别高度hp的个别高度信息。如果这样做,则由于也考虑容器群cg的载置倾斜θ而求出容器c的个别高度hp,所以能够更高精度地取得个别高度信息。
70.(3)在上述的实施方式中,对于将载置面f划区为多个单位划区a、通过计测装置3针对多个单位划区a的每个计测z方向的位置、将计测出的每个单位划区a的z方向的位置作为坐标信息ic的一部分存储于存储部22的例子进行了说明。但是,并不限定于这样的例子,也可以不将载置面f划区为多个单位划区a,而将由计测装置3计测的每个点的z方向的位置作为坐标信息ic的一部分存储于存储部22。在此情况下,相邻的计测地点与计测地点之间的点不拥有被计测出的z方向的位置数据。在此情况下,优选的是相邻的计测地点彼此之间的各点的z方向的位置通过对该相邻的两个计测地点的z方向的位置数据进行线性插补来求出。
71.(4)在上述的实施方式中,对构成为能够将底面的尺寸及高度的至少一方不同的多个种类的容器c保管于载置面f的例子进行了说明。但是,并不限定于这样的例子,在物品保管设备100中,也可以使得仅同种类的容器c被保管于载置面f。
72.(5)在上述的实施方式中,对控制装置2将载置倾斜θ成为规定值以上的载置面f上的区域设定为禁止载置容器群cg的禁止区域的例子进行了说明,但也可以不设定那样的禁止区域。
73.(6)另外,在上述的实施方式中公开的结构只要不发生矛盾,也可以与在其他实施方式中公开的结构组合而应用。关于其他的结构,也在本说明书中公开的实施方式在全部的方面都只不过仅仅是例示。因而,在不脱离本公开的主旨的范围内能够适当进行各种改变。
74.〔上述实施方式的概要〕以下,对在上述中说明的物品保管设备进行说明。
75.一种物品保管设备,具备输送容器的输送装置和对前述输送装置进行控制的控制装置,在构成保管场所的载置面,载置将多个前述容器设为层积状态而构成的容器群并保管,前述控制装置具备存储部;将由前述载置面构成的理想的平面设为基准面,将沿着前述基准面且相互正交的方向设为x方向及y方向,将与前述基准面正交的方向设为z方向;在前述存储部,存储有表示前述载置面的多个部位各自的前述x方向、前述y方向及前述z方向的实际的位置的坐标信息、表示前述容器的沿着前述x方向及前述y方向的底面的尺寸的底面尺寸信息、表示前述容器的沿着前述z方向的高度的高度尺寸信息、表示前述容器群的前述载置面上的前述x方向及前述y方向的位置的容器群位置信息、和表示作为构成前述容器群的前述容器的数量的层积数的层数信息;前述输送装置具备把持单个前述容器或多个层积状态的前述容器的把持部、使前述把持部在前述x方向及前述y方向上移动的移动机构、和使前述把持部沿着前述z方向升降的升降机构;前述控制装置进行基于存储于前述存储部的前述坐标信息、前述底面尺寸信息和前述容器群位置信息求出作为载置于前述载置面的前述容器群相对于前述z方向的倾斜的载置倾斜的倾斜运算处理,以及基于前述容器群位置信息、前述载置倾斜和前述高度尺寸信息求出表示构成前述容器群的各层的前述容器的前述x方向及前述y方向的位置的个别位置信息的个别位置运算处理,基于前述个别位置信息对前述移动机构进行控制。
76.根据本结构,在载置面的某个场所载置有容器群的情况下,根据关于该容器群的容器群位置信息和底面尺寸信息,能够掌握该容器群的底面在载置面占据的区域的位置及尺寸。除此以外,由于在存储部存储有载置面的多个部位各自的坐标信息,更详细地讲存储有表示多个部位各自的x方向、y方向及z方向的实际的位置的信息,所以基于这些信息,能够求出作为载置于载置面的容器群的相对于z方向的倾斜的载置倾斜。这里,载置倾斜成为作为容器群整体的倾斜,但作为x方向及y方向的位置,随着朝向上方而相对于容器群的底面的x方向及y方向的位置的偏差变大。根据本结构,进行基于上述的载置倾斜、容器群位置信息和构成该容器群的各层的容器1个1个的高度尺寸信息求出表示各层的容器的x方向及y方向的位置的个别位置信息的个别位置运算处理。由此,能够将关于构成容器群的各层的容器各自的x方向及y方向的实际的位置作为个别位置信息掌握。而且,通过基于该个别位置信息对移动机构进行控制,能够根据构成容器群的各层的容器各自的实际的x方向及y方向的位置,高精度地使把持部移动而进行输送动作。因而,根据本结构,即使在将多个容器设为层积状态而构成的容器群被倾斜载置于载置面的情况下,也能够对于该容器群进行适当的输送动作。
77.这里,优选的是,在前述倾斜运算处理中,前述控制装置基于前述容器群位置信息和前述底面尺寸信息,求出作为前述容器群的最下层的前述容器的前述底面的容器群底面在前述x方向及前述y方向上占据的前述载置面上的区域即容器群底面区域,基于与前述容
器群底面区域对应的多个部位的前述坐标信息,求出前述容器群底面的多个部位的前述z方向的位置,基于前述容器群底面的多个部位的前述z方向的位置,求出前述容器群底面的倾斜,基于前述容器群底面的倾斜,求出前述载置倾斜。
78.根据本结构,由于求出作为在载置面中容器群底面占据的区域的容器群底面区域,基于与该容器群底面区域对应的坐标信息求出容器群底面的倾斜,由此求出载置倾斜,所以能够适当地求出载置倾斜。
79.此外,优选的是,前述控制装置基于存储于前述存储部的前述坐标信息、前述高度尺寸信息和前述容器群位置信息,求出表示构成前述容器群的各层的前述容器的前述z方向的位置的个别高度信息,基于前述个别高度信息对前述升降机构进行控制。
80.根据本结构,能够根据构成容器群的各层的容器各自位于的实际的高度,对由升降机构带来的把持部的升降量进行控制。由此,对于构成容器群的各层的容器各自,能够高精度地使把持部移动而进行输送动作。
81.此外,优选的是,前述控制装置将前述容器群的前述z方向的全域在前述z方向上划分为多个高度区,在前述个别位置运算处理中,针对每个前述高度区求出前述个别位置信息作为共同的值。
82.由于载置面通常被沿着作为理想的平面的基准面设置,所以载置面的多个部位的高度的离差实际上是微小的。因此,即使在容器群具有载置倾斜的情况下,关于构成该容器群的各层的容器中的在z方向上相邻的容器彼此或在z方向上被配置在相互接近的位置的容器彼此,各自的x方向及y方向的位置(个别位置信息)的差微小的情况也较多。而且,有这样的微小的x方向及y方向的位置的差比用来使把持部在x方向及y方向上移动的移动机构的动作精度小的情况,不需要连那样的情况下都详细地求出各层的容器的个别位置信息。根据本结构,由于不是对于构成容器群的全部的各层的容器各自求出个别位置信息,而是针对每个高度区作为共同的值求出个别位置信息,所以能够减轻控制装置的运算负荷。
83.此外,优选的是,在前述存储部,存储有关于被载置于前述载置面的多个前述容器群各自的前述容器群位置信息、和关于多个前述容器群各自的前述层数信息;前述倾斜运算处理及前述个别位置运算处理以被前述控制装置选择为输送对象的前述容器群为对象而进行。
84.根据本结构,对于被载置于载置面的多个部位的多个容器群各自能够进行考虑到由载置倾斜带来的x方向及y方向的位置偏差的高精度的输送动作。
85.此外,优选的是,在前述存储部,存储有关于前述底面的尺寸及前述高度的至少一方不同的多个种类的前述容器各自的前述底面尺寸信息及前述高度尺寸信息、和表示构成前述容器群的前述容器的种类的种类信息;前述控制装置基于关于被选择为输送对象的前述容器群的前述种类信息,从前述存储部取得前述底面尺寸信息及前述高度尺寸信息。
86.根据本结构,即使在作为构成容器群的容器,存在底面的尺寸及高度的至少一方不同的多个种类的容器的情况下,也能够使用关于这些多个种类的容器各自的底面尺寸信息及高度尺寸信息,适当地进行倾斜运算处理及个别位置运算处理,进行高精度的输送动作。
87.此外,优选的是,前述控制装置基于存储于前述存储部的前述坐标信息和前述底面尺寸信息,将前述载置倾斜成为规定值以上的前述载置面上的区域设定为禁止载置前述
容器群的禁止区域。
88.根据本结构,由于载置倾斜成为规定值以上的载置面上的区域被设定为禁止载置容器群的禁止区域,所以能够设为仅载置倾斜不到规定值的容器群被载置于载置面的状态。因而,能够将容器群的载置倾斜抑制得较小而提高稳定性,并且能够使得难以产生输送动作的错误。另外,禁止区域例如能够作为用于作业者进行作业的作业区或作业者的通路利用。
89.产业上的可利用性有关本公开的技术能够利用于具备输送容器的输送装置和对前述输送装置进行控制的控制装置、在构成保管场所的载置面载置将多个前述容器设为层积状态而构成的容器群并保管的物品保管设备。
90.附图标记说明100
ꢀꢀ
:物品保管设备1
ꢀꢀꢀꢀ
:输送装置2
ꢀꢀꢀꢀ
:控制装置11
ꢀꢀꢀ
:移动机构12
ꢀꢀꢀ
:升降机构22
ꢀꢀꢀ
:存储部101
ꢀꢀ
:把持部af
ꢀꢀꢀ
:容器群底面区域ah
ꢀꢀꢀ
:高度区c
ꢀꢀꢀꢀ
:容器cg
ꢀꢀꢀ
:容器群cgb
ꢀꢀ
:容器群底面cgp
ꢀꢀ
:容器群位置ch
ꢀꢀꢀ
:高度尺寸cp
ꢀꢀꢀ
:个别(individual)位置f
ꢀꢀꢀꢀ
:载置面fs
ꢀꢀꢀ
:基准面n
ꢀꢀꢀꢀ
:层积数θ
ꢀꢀꢀꢀ
:载置倾斜ic
ꢀꢀꢀ
:坐标信息is
ꢀꢀꢀ
:底面尺寸信息ih
ꢀꢀꢀ
:高度尺寸信息icgp :容器群位置信息in
ꢀꢀꢀ
:层数信息icp
ꢀꢀ
:个别位置信息ihp
ꢀꢀ
:个别高度信息it
ꢀꢀꢀ
:种类信息。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1