臂架式高空作业平台的制作方法
1.本发明涉及一种高空作业平台,更具体地说,涉及一种臂架式高空作业平台。
背景技术:
2.液压行走系统由于其输出力矩大、功率密度高等特点使其在工程机械中得到广泛应用。目前,行业中臂架式高空作业平台采用整体式底盘,在底盘两侧安装通过四个液压马达,配合四个行走减速机对车轮进行控制,如果要实现无极变速,则需要四个变量马达配合四个行走减速机工作,价格昂贵。
3.上述现有的液压行走系统主要存在以下几个问题,转弯时差速性能差,在大范围转弯时极易引起整机抖动;多马达行走液压系统转弯半径过大,短距离转场困难;转弯过程中弯道外侧马达供油不足,导致马达吸空、气蚀等现象,严重影响液压行走系统的可靠性。此外,行走控制阀到行走马达高低速控制、制动控制,加上行走马达自身的进油管、回油管、泄漏油管,单个马达的控制就需要五根软管,最长的有近三米,四驱则需要二十根软管,占据了底盘很大的空间,极大地增加了装配和维修难度。
4.需要说明的是,公开于本发明背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现要素:
5.本发明要解决的技术问题是针对现有臂架式高空作业平台行走系统的缺点,而提供一种臂架式高空作业平台,单化整机系统设计简,降低结构件加工难度与成本,易于整车的布局,提高行走的稳定性。
6.本发明为实现其目的的技术方案是这样的:提供一种臂架式高空作业平台,包括动力系统、底盘行走系统、控制系统;所述动力系统包括发动机、液压油箱、由发动机驱动的闭式高压变量泵;所述闭式高压变量泵包括吸油口与液压油箱连接的工作泵、用于控制工作泵排量的排量控制阀;其特征在于:
7.所述底盘行走系统包括整车底盘、安装在整车底盘上的整体式前驱动桥和后驱动桥、减速箱、驱动马达;所述减速箱的输出轴通过传动轴同时与所述前驱动桥和后驱动桥传动连接,所述驱动马达的输出轴与所述减速箱的输入轴连接,所述驱动马达通过管路与所述工作泵连接成闭式液压回路;
8.所述控制系统包括整机控制器、用于响应用户操作而输出人工信号的操作装置,所述工作泵的排量控制阀和发动机转速控制器与所述整机控制器电连接。
9.本发明中采用整车底盘和整体式驱动桥,提高底盘零件的互换性,降低装配和维修难度,整机系统设计简单化,降低结构件的加工难度与成本,易于整车的布局;驱动桥自带的机械式差速器可靠性高,提高了行走的稳定性,有效的克服打滑现象,使之驱动效果更佳。高压变量泵和驱动马达组成的闭式液压动力源,配备减速箱,放大行车速度调整范围,
同时在满足四驱的条件下降低了成本,精简了液压管路。
10.上述臂架式高空作业平台中,所述闭式高压变量泵还包括补油泵、单向补油阀;所述补油泵的吸油口与液压油箱连接,所述补油泵的泵口与所述单向补油阀的进油端连通,所述单向补油阀的两补油出口分别与所述工作泵的两工作口连接。
11.上述臂架式高空作业平台中,所述闭式高压变量泵还包括补油过滤器,所述补油过滤器的两端分别与所述补油泵的泵口与补油阀的进油端连接。
12.上述臂架式高空作业平台中,所述闭式高压变量泵还包括单向补油溢流阀,所述单向补油溢流阀的进油端与所述补油阀的进油端连通,经回油过滤器与液压油箱连接。
13.上述臂架式高空作业平台中,所述驱动马达包括变量马达、用于控制变量马达的变量马达控制阀、两进油端分别与所述变量马达的两工作口对应连接的梭阀,所述变量马达控制阀的电磁线圈与所述整机控制器连接;所述梭阀的出油端与所述变量马达控制阀的进油端连接。该液压行走系统可在变量马达具有动力的同时进行换挡,实现变量马达的负载换挡。
14.上述臂架式高空作业平台中,所述前驱动桥铰接在所述整车底盘上,在所述前驱动桥与所述整车底盘之间安装有两个浮动油缸、在浮动油缸上设置有浮动油缸平衡阀,所述浮动油缸平衡阀与浮动桥电磁阀连接,所述浮动桥电磁阀的电磁线圈与所述整机控制器连接,浮动桥电磁阀的进油端与所述梭阀的出油端连接。
15.上述臂架式高空作业平台中,所述底盘行走系统还包括制动系统,所述制动系统包括安装于所述前驱动桥和后驱动桥两端的制动器、与制动器连接的制动电磁阀,所述制动电磁阀的电磁线圈与所述整机控制器连接,所述制动电磁阀的进油端与所述梭阀的出油端连接。在本发明中,制动器为常闭制动器,没有压力油通过制动电磁阀流向制动器时,制动器处于制动状态,臂架式高空作业平台不行走时,梭阀不能从变量马达的两工作油口引出压力油通过制动电磁阀作用于制动器,也即不能解除制动器的制动,确保安全。当臂架式高空作业平台行走时而操作员不进行制动动作时,制动电磁阀处于导通状态,梭阀从变量马达的两工作油口引出压力油通过制动电磁阀作用于制动器,解除制动器的制动。当操作员踩踏制动踏板时,制动电磁阀断电而将制动器的油缸与回油口连接泄压,实现制动器制动。本发明中,通过从变量泵的工作油口引入解除制动的压力油,并采用常闭式制动器,实现停止行走时自动制动和行走时自动解除制动,提高臂架式高空作业平台的安全性。
16.上述臂架式高空作业平台中,所述制动电磁阀的进油端与所述梭阀的出油端之间的连接油路上串联一个可调式减压阀。
17.上述臂架式高空作业平台中,所述驱动马达还包括两端分别与所述变量马达的两工作口对应连接的双向溢流阀、连接在所述变量马达的两工作口之间平衡阀。、
18.上述臂架式高空作业平台中,所述控制系统还包括用于测量所述变量马达输出轴扭矩的扭矩传感器,所述扭矩传感器与所述控制器连接。
19.本发明与现有技术相比,本发明臂架式高空作业平台底盘零件互换性高,装配和维修难度低,整机系统设计简单化,降低结构件的加工难度与成本,易于整车的布局;驱动桥自带的机械式差速器可靠性高,行走稳定性提高,有效的克服打滑现象、在满足四驱的条件下降低了成本,精简了液压管路。
附图说明
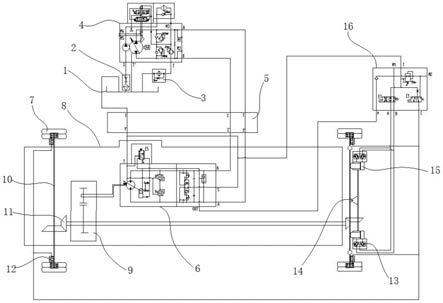
20.图1为本发明臂架式高空作业平台行走系统液压原理图。
21.图2为本发明中闭式高压变量泵液压原理图。
22.图3为本发明驱动马达液压原理图。
23.图4为本发明电磁液压阀块液压原理图。
24.图5为本发明臂架式高空作业平台控制系统框图。
25.图中零部件名称及序号:
26.液压油箱1、吸油过滤器2、回油过滤器3、闭式高压变量泵4、中心回转接头5、行走驱动马达6、车轮7、整车底盘8、减速箱9、后驱动桥10、传动轴11、制动器12、浮动油缸平衡阀13、前驱动桥14、浮动油缸15、电磁液压阀块16。
27.补油泵401、工作泵402、柴油发动机403、单向补油阀404、单向补油溢流阀405、排量控制阀406、补油过滤器407。
28.变量马达601、扭矩传感器602、双向溢流阀603、平衡阀604、梭阀605、变量马达控制阀606。
29.浮动桥电磁阀1601、制动电磁阀1602、可调式减压阀1603。
具体实施方式
30.下面结合附图说明具体实施方案。
31.本发明中的臂架式高空作业平台行走系统如图1所示,包括动力系统、底盘行走系统、控制系统。
32.动力系统包括发动机403、液压油箱1、闭式高压变量泵4。如图2所示,闭式高压变量泵4包括工作泵401、排量控制阀406、补油泵401、单向补油阀404、补油过滤器407、单向补油溢流阀405。排量控制阀406为双喷嘴挡板电磁阀。
33.工作泵402和补油泵401串联,通过传动轴与柴油发动机403相连获取原动力。
34.如图1图2所示,液压油箱1设置有两个出油口和两个回油口工作泵402通过排量控制阀406控制排量。工作泵402的泄漏油口t’通过高压软管与液压油箱1直接相连;补油泵401的吸油口s通过吸油过滤器2与液压油箱1相连。
35.补油泵401的泵口与单向补油阀404的进油端连通,单向补油阀404的两补油出口分别与工作泵402的工作口a和工作口b连接。补油过滤器407的两端分别与补油泵401的泵口与单向补油阀404的进油端连接。单向补油溢流阀405的进油端与单向补油阀404的进油端连通,出油端与闭式高压变量泵4的回油口t连接,闭式高压变量泵4的回油口t经回油过滤器3与液压油箱连接。
36.底盘行走系统包括整车底盘8、安装在整车底盘8上的整体式前驱动桥14和后驱动桥10、减速箱9、驱动马达6。减速箱9的输出轴通过传动轴11同时与前驱动桥14和后驱动桥10传动连接。前驱动桥14和后驱动桥10中自带差速器,实现驱动桥转向时转向内外侧车轮7之间的差速。
37.如图3所示,驱动马达6包括变量马达601、变量马达控制阀606、梭阀605、双向溢流阀603、平衡阀604。变量马达控制阀606用于控制变量马达601的排量,进而改变变量马达601的输出扭矩。双向溢流阀603的两端分别与变量马达601的两工作口对应连接,控制端与
驱动马达6的回油口t连接。平衡阀604连接在变量马601的两工作口之间。梭阀605的两进油端分别与变量马达601的两工作口对应连接。变量马达控制阀606为两位三通电磁阀,其进油端与梭阀605的出油端连接,回油端与驱动马达6的回油口t连接,出油口与变量马达601的排量调节油缸连接。
38.如图1所示,变量马达601的工作油口a和工作油口b通过高压软管和中心回转接头5与工作泵402的工作口a和工作口b连接,形成闭式回路。
39.如图1所示,前驱动桥14铰接在整车底盘8上,在前驱动桥14与整车底盘8之间安装有两个浮动油缸15、在浮动油缸15上设置有浮动油缸平衡阀13,浮动油缸平衡阀13与浮动桥电磁阀1601连接,浮动桥电磁阀1601的进油端与梭阀605的出油端连接。
40.底盘行走系统还包括制动系统,制动系统包括安装于前驱动桥14和后驱动桥10两端的制动器12、与制动器12连接的制动电磁阀1602、可调式减压阀1603,制动电磁阀1602的进油端与梭阀605的出油端连接。可调式减压阀1603串联在制动电磁阀1602与梭阀65的出油端之间,即可调式减压阀1603的两端分别与制动电磁阀1602的进油端与梭阀605的出油端连接。
41.在本实施例中,浮动桥电磁阀1601、制动电磁阀1602、可调式减压阀1603集成在电磁液压阀块16中,可调式减压阀1603的输出压力可根据制动器12的制动压力而调定。浮动桥电磁阀1601为两位四通阀,制动电磁阀1602为两位两通阀。该阀块设置总进油口p,浮动桥电磁阀1601的进油端和制动电磁阀1602的进油端与总进油口p相通。浮动桥电磁阀1601和制动电磁阀1602的回油口相通,并与阀块的总回油口t连通。电磁液压阀块16的总进油口p与驱动马达6的out口通过高压软管相连,驱动马达6的out口与梭阀605的出油端连接。制动电磁阀1602的油口c与四个液压制动器12相连接。浮动桥电磁阀1601出油口与浮动油缸平衡阀13连接,其中出油口a与浮动油缸平衡阀13的控制端连接,出油口b与浮动油缸平衡阀的回油口相连。制动电磁阀1602的回油口和浮动桥电磁阀1601的回油口与电磁液压阀块总的总回油口t连接,电磁液压阀块16的总回油口t与变量马达604的泄漏油口相连,随后与中心回转接头5的油口相连,最终与液压油箱1相连。
42.如图5所示,控制系统包括整机控制器17、操作装置18、扭矩传感器602。
43.扭矩传感器602与整机控制器17连接,扭矩传感器602用于测量变量马达输出轴扭矩。
44.操作装置18与整机控制器17连接,用于响应用户操作而输出人工信号,以便操作人员通过操作装置18实现臂架式高空作业平台的使能、行走前进、行走后退、制动、浮动桥开启等动作。
45.整机控制器17至少包括五个开关量输入口,两个模拟量输入口;操作装置18的使能信号、前进信号、后退信号、浮动桥开启信号、制动信号与整机控制器的开关量输入端连接;扭矩传感器和油门踏板信号与整机控制器的模拟量输入端连接;整机控制器输出端与各个电磁阀的电磁线圈以及柴油机转速控制器连接。电磁阀包括闭式高压变量泵中的排量控制阀406、变量马达控制阀606、浮动桥电磁阀1601、制动电磁阀1602。其中排量控制阀406和变量马达控制阀606为比例电磁阀,浮动桥电磁阀1601和制动电磁阀1602为开关电磁阀。
46.如图1至图5所示,本发明臂架式高空作业平台,当柴油发动机403启动时,所有电磁阀均不得电,臂架式高空作业平台处于制动状态,工作泵402和变量马达604以极小的排
量进行内循环,补油泵401的流量也通过单向补油溢流阀405返回液压油箱。
47.以臂架式高空作业平台前进为例,此时操作装置18输出使能信号和前进信号,同时根据油门踏板受力程度输出油门踏板信号控制排量控制阀406的比例电磁铁e1。行走液压系统的前进包括以下过程:工作泵401为变量马达601提供动力;变量马达401输出端与减速箱9相连后,通过传动轴11将动力输送至前驱动桥14和后驱动桥10,进而完成高空作业平台的前进。同时制动电磁阀1602的电磁铁e4得电,梭阀605从变量马达601的工作油口引入高压油液,经可调式减压阀1603和制动电磁阀1602作用于制动器12的油缸,使各制动器油缸克服弹簧弹力,实现制动解除。
48.当需要加速或者减速时,整机控制器17会根据油门踏板受力程度接受到不同大小的油门输出信号,经过运算后按比例输出控制信号到排量控制阀406的比例电磁铁e1,从而改变工作泵的排量。同时,柴油机转速控制器也得到信号,根据不同大小的油门输出信号增加或者减小柴油发动机的转速,实现臂架式高空作业平台的行走系统的无级变速。
49.在行走过程中,当变量马达601的工作载荷变化时,安装在变量马达601输出轴上的扭矩传感器602检测到实时扭矩,并将信号传送至整机控制器17,整机控制器17经运算后将控制信号输出至变量马达控制阀606的比例电磁铁e5,一定比例的控制液压油进入变量油缸的无杆腔,改变变量马达601的排量,进而改变驱动马达6的输出扭矩,以适应工作载荷的变化,实现了行走过程中的自动换挡。
50.在行走过程中,操作者可以通过操作装置18输出浮动桥开启信号和制动信号。当输出浮动桥开启信号时,浮动桥电磁阀1601的开关电磁铁e3得电,浮动桥电磁阀1601打开工作于左位,来自梭阀605的液压油通过浮动桥电磁阀1601作用于浮动油缸平衡阀13的控制端,同时浮动油缸平衡阀13的回油口经浮动桥电磁阀1601、电磁液压阀块16的回油口t、中心回转接头与液压油箱连接,实现浮动油缸15的大腔与小腔相通而实现浮动。当输出制动信号时,整机控制器18会使制动电磁阀的1602电磁铁e4失电,制动电磁阀的1602工作于右位,制动器12开启,制动器12在其内弹簧的弹力作用下而处于制动状态,同时其他电磁阀也均不得电,臂架式高空作业平台处于制动状态,柴油机转速控制器控制柴油发动机处于怠速状态,工作泵402以极小的排量进行内循环,补油泵的流量也通过补油溢流阀返回液压油箱。
51.本发明与现有技术相比,本发明臂架式高空作业平台底盘零件互换性高,装配和维修难度低,整机系统设计简单化,降低结构件的加工难度与成本,易于整车的布局;驱动桥自带的机械式差速器可靠性高,行走稳定性提高,有效的克服打滑现象、在满足四驱的条件下降低了成本,精简了液压管路。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1