一种空间移载系统的制作方法
1.本发明涉及一种空间移载系统。
背景技术:
2.目前物体在空间内沿竖直方向移动的方式主要包括牵引式和举升式。其中,牵引式的特点是驱动单元在被移动物体的上方,固定不发生位移,然后通过柔性介质以拖拽方式传递牵引力,使得负载发生空间移动,常用介质包括链条、钢丝绳和齿形带。举升式的特点是驱动单元在被移动物体的下方,固定不发生位移,然后通过刚性介质传递举升力使得负载发生空间移动,常用介质包括气缸、油缸和螺杆。
3.采用牵引式或者举升式的移动方式可以实现物体在空间内的上下移动,即物体的位移轨迹沿竖直方向,进行空间直线移动。为了增加物体的移动轨迹,进一步实现物体到达指定高度后的水平移动,通常会在牵引机构或者举升机构的基础上增加平移机构,从而来实现物体在空间内的双向移动。
4.但是,采用牵引式或者举升式来实现物体的空间移动,还存在以下问题:1、牵引机构或者举升机构只能实现单一物体的空间移动,而且整个物体移动系统中一般仅设置一个牵引机构或者举升机构,这样就导致物体移动效率低;2、对于整个物体移动系统而言,如果牵引机构或者举升机构出现故障或者需要维护,就会导致整个系统无法运行。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种空间移载系统,其具有大幅度提高移载效率以及降低故障率的优势。
6.为实现上述目的,本发明提供了如下技术方案:一种空间移载系统,包括:两个竖直相对的轨道网络;以及,承载于两个所述轨道网络之间的多个移载单元;其中,所述移载单元能够沿所述轨道网络实现空间移动。
7.通过采用上述方案,将轨道网络固定化,移载单元用于装载物体,然后沿着轨道网络上的轨迹路径进行移动,实现物体的转移,从而可以方便地在同一系统中设置多个移载单元,来同时移动多个物体,进而提高整个系统的移载效率;而且,即使其中一个移载单元出现故障,也只会影响局部,而不会使整个系统停止运行。
8.进一步地,所述轨道网络包括直线型、多段线型或者环线型。
9.进一步地,所述轨道网络包括竖直轨道和水平轨道,所述移载单元能够从所述竖直轨道连续性地移动至水平轨道。
10.进一步地,所述轨道网络包括竖直轨道、水平轨道以及设置于所述竖直轨道与水平轨道交汇处的轨道衔接单元。
11.进一步地,所述轨道衔接单元包括转动板,所述转动板上设置有直向衔接轨道和
曲向衔接轨道。
12.通过采用上述方案,对于前进中的移载单元,经过轨道衔接单元时可以拥有三个继续移动的方向选择,分别是向前、向左和向右,从而能够增加移载单元的移动路径;在空间移载系统中,移载单元包括多个可以选择的移动路径,从而能够实现多个移载单元分别独立地移动,进而大幅度提高系统的移载效率。
13.进一步地,所述转动板上设置有两个所述曲向衔接轨道,且两个所述曲向衔接轨道分别于所述直向衔接轨道两侧。
14.通过采用上述方案,采用两个曲向衔接轨道能够增加移动路径,减少调整频率,提高调整效率,从而提高系统的移载效率。
15.进一步地,所述曲向衔接轨道呈曲线型,亦或者包括直线段和曲线段。
16.通过采用上述方案,曲向衔接轨道整体呈曲线型,或者包括曲线段,能够使转向时平稳顺畅过渡。
17.进一步地,所述移载驱动机构与轨道网络之间采用接触式的传动连接,或者非接触式的传动连接。
18.进一步地,所述移载单元还包括移载支架,所述移载支架两端分别设置有所述移载驱动机构。
19.通过采用上述方案,采用两个移载驱动机构来同时提供驱动力,能够保证移动过程中的稳定性。
20.进一步地,所述轨道网络包括轨道主体,所述移载驱动机构与轨道主体之间设置有导向限位组件。
21.通过采用上述方案,导向限位组件起到限位、导向和防脱离的作用,使移载驱动机构与轨道网络持续保持传动连接。
22.综上所述,本发明具有以下有益效果:1、将轨道网络固定化,移载单元用于装载物体,然后沿着轨道网络上的轨迹路径进行移动,实现物体的转移,从而可以方便地在同一系统中设置多个独立工作的移载单元,来同时移动多个物体,进而提高整个系统的移载效率;而且,由于多路径可达,即使其中一个移载单元或者轨道衔接单元出现故障,也只会影响局部,而不会使整个系统停止运行;2、轨道网络中只有轨道衔接单元涉及机电系统,其故障率低,便于维护。
附图说明
23.图1为实施例1中一种空间移载系统的结构示意图;图2为实施例1中直线型的轨道网络的结构示意图;图3为多段线型的轨道网络的结构示意图;图4为环线型的轨道网络的结构示意图;图5为实施例1中轨道网络的结构示意图;图6为实施例1中轨道衔接单元的结构示意图一;图7为实施例1中轨道衔接单元的结构示意图二;图8为实施例1中轨道衔接单元的结构示意图三;图9为实施例1中移载单元的结构示意图;
图10为实施例1中移载驱动机构的部分组件结构示意图;图11为实施例1中移载驱动机构与轨道网络的结构示意图;图12为实施例2中轨道衔接单元的结构示意图一;图13为实施例2中轨道衔接单元的结构示意图二;图14为实施例2中轨道衔接单元的结构示意图三;图15为实施例2中移载驱动机构的部分组件结构示意图。
24.图中:1、轨道网络;11、竖直轨道;12、水平轨道;13、轨道衔接单元;131、转动板;132、直向衔接轨道;133、曲向衔接轨道;141、第一轨道主体;142、第一传动部;143、第一限位部;151、第二轨道主体;152、第二传动部;153、限位槽;2、移载单元;21、移载支架;22、移载驱动机构;221、第一支撑座;222、第一驱动部;223、限位支座;224、第一限位滚轮;225、第二支撑座;226、第二驱动部;227、第二限位滚轮。
具体实施方式
25.以下结合附图对本发明作进一步详细说明。
26.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
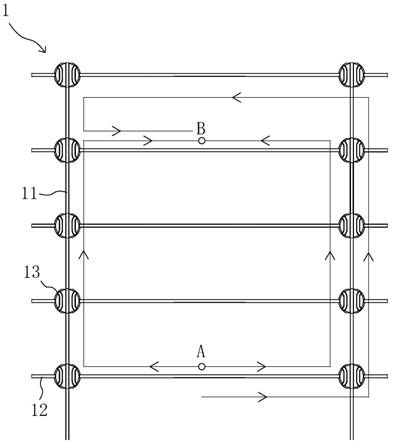
27.实施例1:一种空间移载系统,参照图1,其包括两个竖直相对的轨道网络1,以及承载于两个轨道网络1之间的多个移载单元2,移载单元2能够沿轨道网络实现空间移动;具体地,本实施例中移载单元2的数量至少为两个,同时本实施例中的空间移载系统采用一组轨道网络1,在其他可选的实施例中,空间移载系统也可以采用多组轨道网络1,在此不做限制;本实施例中将轨道网络1固定化,移载单元2用于装载物体,然后沿着轨道网络1上的轨迹路径进行移动,实现物体的转移;本实施例中可以方便地在同一系统中设置多个移载单元2,来同时移动多个物体,从而提高整个系统的移载效率;而且,即使其中一个移载单元2出现故障,也只会影响局部,而不会使整个系统停止运行。
28.参照图2至图4,本实施例中轨道网络1呈直线型,即移载单元2在一个竖直空间内移动,而空间移载系统的两侧均可以作为物体存放区,移载单元2将物体移载至其一物体存放点时,再配合平移机构将物体从移载单元2上转移至物体存放点;在其他可选的实施例中,轨道网络1也可以呈多段线型或者环线型;对于多段型,即移载单元2可以在多个竖直空间内移动;对于环线型,即移载单元2可以在多个竖直空间内实现闭环移动,而整个系统内侧的物体存放区可以相互独立或者相互连通。
29.参照图1和图5,本实施例中轨道网络1包括竖直轨道11和水平轨道12,移载单元2能够从竖直轨道11连续性地移动至水平轨道12,从而能够提高移动效率;在其他可选的实施例中,也可以使移载单元2采用停顿的方式从竖直轨道11移动至水平轨道12上,在此不做限制;同时,在其他可选的实施例中,轨道网络1还可以包括斜轨道或者曲线轨道,在此不做限制。
30.参照图1以及图5至图8,本实施例中轨道网络1还包括设置于竖直轨道11与水平轨道12交汇处的轨道衔接单元13,竖直轨道11、水平轨道12以及轨道衔接单元13的数量均为
多个;具体地,轨道衔接单元13包括转动板131,转动板131上设置有直向衔接轨道132和曲向衔接轨道133;控制转动板131转动使直向衔接轨道132与竖直轨道11或者水平轨道12相对,即可实现移载单元2在竖直方向或者水平方向上的连续移动;控制转动板131转动使曲向衔接轨道133分别与竖直轨道11和水平轨道12相对,即可实现移载单元2在竖直方向与水平方向之间的连续性移动。
31.参照图1以及图5至图8,进一步地,本实施例中转动板131上设置有两个曲向衔接轨道133,且两个曲向衔接轨道133分别位于直向衔接轨道132两侧;本实施例中通过控制转动板131转动来调整衔接轨道,那么采用两个曲向衔接轨道133能够增加移动路径,减少调整频率,提高调整效率,从而提高系统的移载效率;在其他可选的实施例中,转动板131上的直向衔接轨道132和曲向衔接轨道133的数量和位置可以根据轨道网络1的轨道布局进行调整,在此不做限制;本实施例中转动板131连接有旋转驱动机构(附图中未示出),旋转驱动机构控制转动板131转动来实现轨道切换;在其他可选的实施例中,轨道衔接单元13也可以采用伸缩的方式来实现轨道切换,在此不做限制,例如直向衔接轨道132伸出衔接时,曲向衔接轨道133缩回,而曲向衔接轨道133伸出衔接时,直向衔接轨道132缩回。
32.参照图1以及图5至图8,本实施例中对于前进中的移载单元2,经过轨道衔接单元13时可以拥有三个继续移动的方向选择,分别是向前、向左和向右,从而能够增加移载单元2的移动路径,提高整个系统的移载效率;例如,移载单元2要从起点a移动至终点b,包括多个可以选择的移动路径,附图中例举了其中三种移动路径;在空间移载系统中,移载单元2包括多个可以选择的移动路径,从而能够实现多个移载单元2分别独立地移动,进而大幅度提高系统的移载效率。
33.参照图1和图9,移载单元2包括移载支架21,移载支架21上设置有与轨道网络1配合的移载驱动机构22;本实施例中移载支架21两端均设置有移载驱动机构22,两个移载驱动机构22分别独立设置,但是同步工作,形成两个动力源,分别与两个轨道网络1配合,来提供驱动力;在其他可选的实施例中,也可以采用一个动力源与同步传动机构来分别与两个轨道网络1配合,在此不做限制;本实施例中工作的机械零件主要集中于移载单元2上,而轨道网络1主要起到导向支撑作用,从而便于维护和检修。
34.参照图5至图11,本实施例中移载驱动机构22与轨道网络1之间采用接触式的传动连接,在其他可选的实施例中,移载驱动机构22与轨道网络1之间还可以采用非接触式的传动连接,例如磁悬浮等,在此不做限制;具体地,本实施例中移载驱动机构22包括第一支撑座221,第一支撑座221上设置有第一驱动部222,以及用于控制第一驱动部222转动的电机减速组件;本实施例中轨道网络1中的各个轨道,其结构包括第一轨道主体141,第一轨道主体141的水平端面设置有与第一驱动部222配合的第一传动部142。
35.参照图5至图11,具体地,本实施例中第一驱动部222与竖直轨道11和直向衔接轨道132之间,采用螺旋副的结构形式来实现传动,在竖直方向移动时利用螺旋副的自锁性来保证安全可靠性;此时,第一驱动部222相当于螺杆,竖直轨道11和直向衔接轨道132上的第一传动部142相当于平面展开后的螺母;而本实施例中第一驱动部222与水平轨道12和曲向衔接轨道133之间,采用齿轮副的结构形式来实现传动,此时,第一驱动部222相当于斜齿轮,水平轨道12和曲向衔接轨道133上的第一传动部142相当于斜齿条,斜齿轮与斜齿条配合在竖直方向起到支撑作用;本实施例中第一驱动部222相当于螺杆和斜齿轮的集成,能够
同时与螺母和斜齿条实现传动连接;本实施例中两个曲向衔接轨道133的第一轨道主体141形成对称结构,但是两个第一传动部142则不对称,即一个曲向衔接轨道133用于实现左转向,另一曲向衔接轨道133用于实现右转向;本实施例中曲向衔接轨道133包括直线段和曲线段,来保证转向时的平稳顺畅过渡。
36.参照图9至图11,移载驱动机构22与第一轨道主体141之间设置有导向限位组件,导向限位组件起到限位、导向和防脱离的作用,使移载驱动机构22与轨道持续保持传动连接关系;具体地,本实施例中导向限位组件包括设置于第一支撑座221上且能够转动的限位支座223,限位支座223内设置有两个v型的第一限位滚轮224;第一轨道主体141的上下两个端面设置有与第一限位滚轮224配合的第一限位部143,第一限位部143截面同样呈v型,第一限位部143与第一限位滚轮224配合实现限位、导向和防脱离的功能;在其他可选的实施例中,导向限位组件也可以采用其它结构形式,在此不做限制。
37.实施例2:一种空间移载系统,参照图12至图15,以实施例1为基础,本实施例与实施例1的区别在于:本实施例中移载驱动机构22包括第二支撑座225,第二支撑座225上设置有两个第二驱动部226;相应的,本实施例中轨道包括第二轨道主体151,第二轨道主体151的上下端面分别设置有与第二驱动部226配合的第二传动部152;具体地,第二驱动部226与第二传动部152之间采用齿轮副的结构形式来实现传动,其中第二驱动部226相当于平齿轮,第二传动部152相当于平齿条;本实施例中两个曲向衔接轨道133能够实现完全对称,同时曲向衔接轨道133呈曲线型,来保证转向时平稳顺畅过渡。
38.参照图12至图15,本实施例中导向限位组件包括设置于第二驱动部226两侧的第二限位滚轮227,第二轨道主体151的上下端面分别设置有与第二限位滚轮227配合的限位槽153,第二限位滚轮227与限位槽153配合来实现导向、限位和防脱离的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1