一种线扫视觉系统匀速自动送料装置的制作方法
1.本发明涉及工业自动化生产、检测领域,如电子制造业、汽车制造业、包装与印刷、加工机械等行业,尤其涉及一种线扫视觉系统匀速自动送料装置。
背景技术:
2.机器视觉应用在各种产业的生产制造及质量检测已有多年,利用机器视觉可以提升检测精度或加速生产速度,因此这一技术已逐渐变成许多生产检测设备必备的一环。目前,市面上的影像检测系统大多采用面阵扫描(area
‑
scan)的方式,但随着产品尺寸的加大(例如lcd面板)、提高产能及精度等要求不断的提高,面扫相机的分辨率及取像速度无法满足这些要求。为解决这些问题,线扫相机(line
‑
scan)应运而生,成为高速、高精度及大尺寸幅面工件检测的首选方案。无论是检查图像的边角,还是评估表面劣化,线扫描相机都是表面质量检测的绝佳选择。不过,线扫检测系统虽然非常适于对连续材料的检测,但其必须利用运动速度才能取得图像,这与面扫检测系统只要单纯的曝光即可取得影像的原理完全不同。因此,对于线扫系统而言,获得的高质量的图像不仅与视觉视觉传感器件有关,而且需要均匀而稳定的运动速度。
3.在当前的自动化生产线上,传送带或滚子是最为常见的工件传送方式。这种传送方式采用开环控制、传动机构组装容易、结构简单、价格便宜,应用也最为广泛。但其突出的局限是在传动输送时,速度难以控制。尤其是两条或者多条传送带一起传送时,存在皮带打滑、松弛等现象。如果直接将传送带作为线扫相机的送料系统,存在速度波动的现象。由于线扫成像与工件传动速度密切相关,这些速度扰动将使得图像的尺寸忽短忽长,难以形成均匀一致的成像效果。如果送料机构完全由闭环伺服控制,不仅送料的运送范围远逊于传送带,成本价格也非常高昂。因此,如何实现一种稳定可靠的、适于线扫视觉系统的匀速自动送料装置,对于提高线扫视觉系统的成像质量和测量精度,进而提高整个系统的自动化程度非常重要。
技术实现要素:
4.本发明的目的在于克服现有技术之不足,提供一种线扫视觉系统匀速自动送料装置。
5.本发明解决其技术问题所采用的技术方案是:
6.一种线扫视觉系统匀速自动送料装置,包括沿传送方向依次连接的送料机构、过渡机构和推送机构;所述送料机构的前端和后端分别设有红外传感器以分别控制所述送料机构的开启和停止;所述过渡机构和推送机构上设有沿传送方向的靠接内壁,所述过渡机构包括辅助轮组件和驱动连接所述辅助轮组件的夹紧机构,所述夹紧机构驱动所述辅助轮组件沿垂直于传动方向靠近和远离所述靠接内壁,所述靠接内壁上对应所述辅助轮组件设有导轮,所述辅助轮组件包括电机、主动轮和两个分别位于主动轮两侧的从动轮,电机驱动连接所述主动轮;所述推送机构包括链条传动机构、导轨、推送块和升降驱动机构,所述推
送块在所述链条传动机构驱动下在所述导轨上滑动,推送块在升降驱动机构驱动下下降沿导轨推送工件;所述推送机构上还设有与靠接内壁相对设置的导引条,所述导引条与传送方向呈30度角,所述推送机构的末端设有波动矫正弹簧;当送料机构的前端的红外传感器感应到工件,启动送料机构送料,至送料机构的后端的红外传感器感应到工件离开,夹紧机构驱动辅助轮组件夹紧工件,并启动主动轮,过渡机构将工件传送至推送机构后,推送块下降并在链条传动机构传动下将工件推送至下一道检测工序。
7.在另一较佳实施例中,所述送料机构的两侧分别设有多个钢制弹簧片。
8.在另一较佳实施例中,所述送料机构为传送带。
9.在另一较佳实施例中,所述推送块为前端窄后端宽的楔形。
10.在另一较佳实施例中,还包括第三红外传感器,所述第三红外传感器设置在所述推送机构的末端以控制下一道检测工序的开启。
11.在另一较佳实施例中,所述夹紧机构为气缸。
12.在另一较佳实施例中,位于所述送料机构的后端的红外传感器的感应方向为与工件传送方向呈45度角度。
13.本发明的有益效果是,由于采用了。
14.以下结合附图及实施例对本发明作进一步详细说明;但本发明的一种线扫视觉系统匀速自动送料装置不局限于实施例。
附图说明
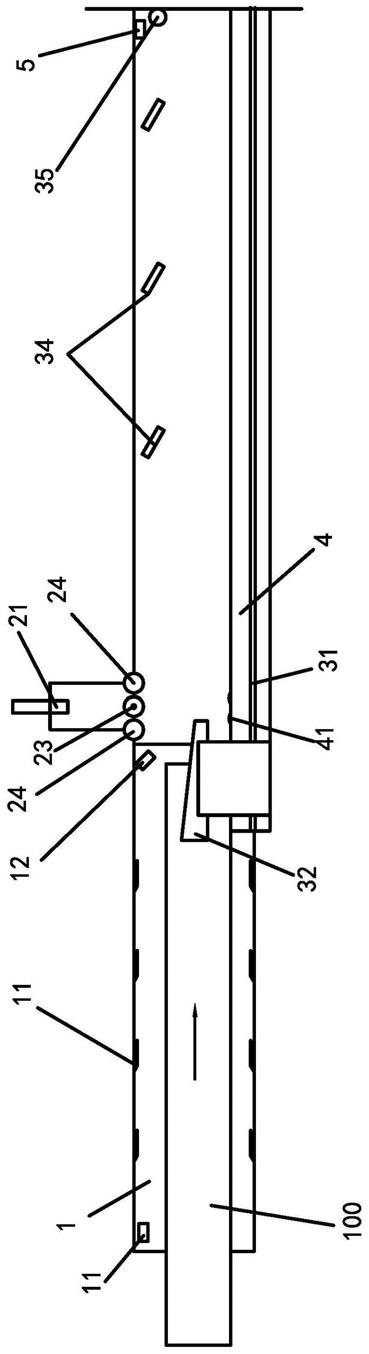
15.图1是本发明一较佳实施例的一种线扫视觉系统匀速自动送料装置的俯视图一,其中工件在传送带上传送。
16.图2是本发明一较佳实施例的一种线扫视觉系统匀速自动送料装置的俯视图二,其中工件传送至过渡机构,过渡机构夹紧工件。
17.图3是本发明一较佳实施例的一种线扫视觉系统匀速自动送料装置的俯视图三,其中过渡机构复位,推送机构的推送块下降进行推送工件。
18.图4是本发明一较佳实施例的一种线扫视觉系统匀速自动送料装置的俯视图四,其中推送机构推送工件进下一道检测工序。
19.图5是本发明一较佳实施例的一种线扫视觉系统匀速自动送料装置的弹簧片的结构示意图。
20.图6是本发明一较佳实施例的一种线扫视觉系统匀速自动送料装置的波动矫正弹簧的结构示意图。
具体实施方式
21.实施例,参见图1至图4所示,本发明的一种线扫视觉系统匀速自动送料装置包括沿传送方向依次连接的送料机构、过渡机构和推送机构,本实施例中,所述送料机构为传送带1,所述传送带1的两侧分别设有多个钢制弹簧片11,弹簧片11的结构如图5所示。所述传送带1的前端和后端分别设有红外传感器12和13以分别控制所述传送带1的开启和停止,其中,位于所述送料机构的后端的红外传感器13的感应方向为与工件传送方向呈45度角度。所述过渡机构和推送机构上设有沿传送方向的靠接内壁4,所述过渡机构包括辅助轮组件
和驱动连接所述辅助轮组件的夹紧机构,所述夹紧机构为气缸21,所述气缸21驱动所述辅助轮组件沿垂直于传动方向靠近和远离所述靠接内壁4,所述靠接内壁4上对应所述辅助轮组件设有导轮41,所述辅助轮组件包括电机、主动轮23和两个分别位于主动轮两侧的从动轮24,电机驱动连接所述主动轮23;所述推送机构包括链条传动机构(图中未示出)、导轨31、推送块32和升降驱动机构,所述升降驱动机构为气缸结构,所述推送块32在所述链条传动机构驱动下在所述导轨31上滑动,推送块32在升降驱动机构驱动下下降沿导轨31推送工件100;所述推送机构上还设有与靠接内壁相对设置的导引条34,所述导引条34与传送方向呈30度角,所述推送机构的末端设有波动矫正弹簧35,如图6所示。
22.本实施例中,所述推送块32为前端窄后端宽的楔形。
23.本实施例还包括第三红外传感器5,所述第三红外传感器5设置在所述推送机构的末端以控制下一道检测工序的开启。
24.以下更详细的说明本实施例:
25.本发明采用半开半闭的两级传动方案,分为为开环的传送阶段和闭环的推送阶段两个行程。在送料的传送阶段,采用开环的传送带输送,便于和现有的传送带机构整合,系统移植方便,在送料的推送阶段,采用闭环伺服电机控制,保证工件输送速度匀速稳定。在两种传送方式之间,采用携带主动轮和辅助轮的夹持机构过渡,保证两种运动的柔顺过渡。
26.为保证送料工件与闭环传动机构紧密结合,使工件从传送带1柔顺过渡到伺服推料机构,采用气动机构夹靠工件,依靠辅助橡胶轮(主动轮、从动轮和导轮)带动工件到推送机构处。其中,气动机构由垂直于工件运动方向的气缸构成,辅助轮都采用硬质橡胶材质,主动轮动作由电机控制。
27.两个从动轮24布置在主动轮23的两侧1cm处,主动轮23高于从动轮24约1mm,当plc发出气缸夹靠动作指令后,气动机构将携带主动轮和从动轮夹紧工件,使其与推动导轨水平。由于主动轮和从动轮都是橡胶材质,具有一定的弹性,所以当夹紧动作完成时,二者都可以贴紧工件,而主动轮比从动轮稍高,可使主动轮贴合更加紧密。在夹靠动作发生的同时,主动轮电机开始旋转运动,利用摩擦带动工件脱离传送带,进入伺服推动机构候选处。主动轮的作用是导引工件由皮带机构柔顺运动到伺服推料机构待推动处,而辅助轮是保证主动轮带动工件运动时不会发生侧倾,保持工件与推送机构水平。
28.送料机构传动由于存在多种方式的过渡,在送料、推料等过程中可能存在倾斜,为此,本实施例设有导引及校正机构将其摆正。
29.1)在开环传送带1侧分别加入两组钢制弹簧片11作为导引装置,避免工件脱离传送带1,传送带1运送工件到脱离传送带1静止后,由过渡机构的气缸21推动将其靠内侧夹紧,使其保持与推送机构内侧呈水平位置。
30.2)校正装置主要用于在闭环伺服过程中,避免推送机构将工件100推偏。考虑到推送机构在匀速推送工件时,由于内侧是靠紧靠接内壁4的,发生偏离轨道时一定会向外侧偏离,故本实施例分别在推送进程中多处加入若干铁质导引条34作为校正装置,且与工件的运动方向呈30度角摆放。导引条34摆放的数量与伺服轨道的长度及工件端面大小和长度有关,可根据需要随时添加。
31.3)在进入视觉系统前,也就是推送机构的末端位置,加入一个弹簧校正机构,即波动矫正弹,35,保证工件最终的方向与线扫方向垂直,并匀速进入线扫系统。
32.本实施例的推送机构前端的推送块的材料采用黑色橡胶,形状为楔形。橡胶材质是为了减弱在推送过程中推送机构前端与工件存在震颤和冲击,使推送机构前端与工件保持紧密贴合,黑色是为了保证推送机构进入线扫视觉系统后,易于利用图像处理方法抠出推送机构,楔形的形状(前端较短,后端较宽)是便于与本套装置的送料校正机构配合,逐步将工件导引到线扫视觉检测之中。
33.本实施例中,涉及两种传动方式及不同工位的控制,选择数字红外传感器作为传动切换及工件位置感知的器件。选择plc控制器作为规划机构动作的核心器件,所有传感器的信号处理、气缸的动作、电机的伺服控制均由plc控制完成,整套系统不需要其他的嵌入式控制器或pc工控机,仅需要plc即可。
34.1)传感器的布置
35.为便于本套装置在指定的工位变换动作和切换传动,需要在合理的位置布置传感器,并于plc的控制指令结合,实现动作的协调一致。根据送料机构传动方式的设计,传感器布局如下:
36.在运料传送带1初始位置放置红外传感器11,用于判断是否进料,放置方式为传感器垂直于工件运送方向。在运料传送带1末端位置放置红外传感器12,用于判断是否传送完毕进料。放置方式为传感器与工件运送方向呈45度角度。
37.在推送机构末端处放置红外传感器5,用于判断推送是否完毕,启动线扫视觉检测系统。放置方式为传感器垂直于工件运送方向。
38.以下说明送料动作系统各功能部件协调控制策略:
39.a.数字红外传感器11在运料传送带初始位置判断是否工件来料,plc根据数字信号高低电平判断是否有工件进入,当判断有工件进入时,plc给传送皮带发送运动指令,输送工件运动。
40.b.工件100在导引机构的导引下,由传送带1输送到传送带末端位置处的红外传感器12处时,判断来料是否传送完毕。当确定来料传送完毕后,plc停止传送带的运动,打开气动紧靠及柔顺过渡机构的气缸夹靠工件。
41.c.过渡机构夹靠住工件后,plc驱动气动机构中的主动轮23的电机带动工件脱离传送带,由从动轮导引至伺服机构待推送处,到达目标地点后,主动轮电机停转,过渡机构复位。
42.d.当工件处于推送机构待推送处后,plc控制推送伺服电机带动推送块32与工件接触,在校正机构的导引下,保持匀速沿推送平面一直推送,当推送机构末端红外传感器5检测到已推送至视觉检测位置,启动光源和相机等视觉系统设备,推送机构复位至初始状态,准备下一次推送。
43.本发明具有如下显著特点:
44.1.将一种半开半闭的两级传动方案用于线扫视觉系统的自动送料,克服了传统皮带传送速度不稳定的缺陷,为可靠的线扫描成像提供了硬件基础。
45.2.在送料过程中,设计了导引、夹持、校正等辅助部件,保证运料输送平稳。
46.3.推送块的形状和材料满足了推送工件稳定推送与线扫视觉检测的实际需求。
47.4.在两级传动中间加入过渡机构,使工件可以从送料机构柔顺过渡到推料机构。
48.5.利用数字红外传感器作为传动切换及工件位置感知的器件,选择plc作为规划
机构动作的核心器件,所有的信号感知、气缸动作、电机伺服控制均在plc的协调控制下完成,无需额外的控制装置,控制简单可靠。
49.上述实施例仅用来进一步说明本发明的一种线扫视觉系统匀速自动送料装置,但本发明并不局限于实施例,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均落入本发明技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1