一种用于垃圾回收点的易腐类垃圾回收装置的制作方法
1.本发明涉及垃圾处理技术领域,特别涉及一种用于垃圾回收点的易腐类垃圾回收装置。
背景技术:
2.易腐垃圾也可称湿垃圾,一般是指餐饮经营者、单位食堂等生产过程中产生的餐厨废弃物,以及家庭生活中产生的易腐性垃圾,主要包括剩菜剩饭、菜梗菜叶、肉食内脏、果壳瓜皮等等,易腐垃圾由于含水量较大,因而其易腐烂变质,成为妨碍正常生产及生活的污染源,造成环境公害。
3.公开号为cn211914033u、名称为“一种厨房垃圾粉碎机”的中国发明专利公开了对易腐垃圾进行循环破碎的结构,通过对易腐垃圾的破碎处理,实现回收,然而这种传统技术仍存在部分技术弊端:
4.1、易腐垃圾含有大量水分,会快速腐蚀锈化相应的破碎部件,导致破碎部件的尖刺端磨损变钝,或是刀具磨损变钝,在长时间使用后并不能保证实际破碎的效率及效果,且容易造成经济性损失;
5.2、通过破碎的方式处理易腐垃圾,其碎屑相互堆积,间接增加了垃圾集群之间的空余空间,进而使得垃圾集群的整体体积变大,且难以进一步的收集回收,对于实用性而言并不理想;
6.为此,提出一种用于垃圾回收点的易腐类垃圾回收装置。
技术实现要素:
7.有鉴于此,本发明实施例希望提供一种用于垃圾回收点的易腐类垃圾回收装置,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择;
8.本发明实施例的技术方案是这样实现的:一种用于垃圾回收点的易腐类垃圾回收装置,包括垃圾箱及负责带动倾泻所述垃圾箱的倾泻架组件,所述垃圾箱的外部设有回收机构,所述回收机构包括机架、滑架、压块、壳体和液压缸;
9.所述液压缸的外表面安装于所述机架的上部,所述滑架的外表面与所述机架的外表面滑动连接,所述压块的外表面安装于滑架的内侧壁,所述壳体的内侧壁顶部与底部均为通槽结构,所述壳体的内侧壁与所述压块的外表面相适配,所述液压缸的活塞杆与所述滑架的顶部固定连接;
10.所述机架的外表面安装有plc控制器。
11.作为本技术方案的进一步优选的:所述滑架的内侧壁安装有配重块。
12.作为本技术方案的进一步优选的:所述机架的外表面安装有滑轨,所述滑架的内侧壁与所述滑轨的外表面滑动连接。
13.作为本技术方案的进一步优选的:所述回收机构还包括抱闸电机和挡板;
14.所述抱闸电机的输出轴与所述挡板的外表面固定连接,所述抱闸电机的外表面安
装于所述机架的外表面,所述挡板的顶部与所述壳体的底部相适配。
15.作为本技术方案的进一步优选的:所述倾泻架组件包括伺服电机、齿轮、半齿圈,不少于三个的摇臂,弧形架和立架;
16.所述伺服电机的外表面安装于所述立架的外表面,所述半齿圈的外表面与所述立架的内侧壁滑动连接,所述伺服电机的输出轴与所述齿轮的内侧壁固定连接,所述齿轮的轮齿与所述半齿圈的轮齿啮合,所述摇臂的外表面一端与所述半齿圈的外表面连接,所述摇臂的外表面另一端与所述弧形架的外表面连接,所述弧形架的内侧壁与所述垃圾箱的外表面固定连接。
17.作为本技术方案的进一步优选的:所述弧形架的外表面设有导料架,所述导料架的内侧壁为倾斜漏斗形,所述导料架的内侧壁倾斜面在水平面投影下,与所述壳体的内侧壁投影相互重合。
18.与现有技术相比,本发明的有益效果是:本发明通过回收机构及倾泻架组件之间的机械联动及相互配合,在实际使用的过程中能够实现对易腐垃圾进行卸料、压制成型、二次卸料的自动化处理流程,能够直接将易腐蚀垃圾的水分挤出,并将其压制成为硬性饼形或块形垃圾且不易松散,不仅解决了传统技术中对相关结构的锈化弊端,同时还辅助满足了后续的搬运、处理工序的便捷性需求,有效提高了实用性及经济性需求。
附图说明
19.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
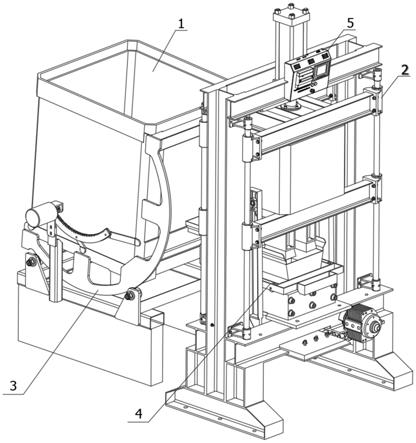
20.图1为本发明的立体结构示意图;
21.图2为本发明的倾泻架组件立体结构示意图;
22.图3为本发明的图2的a区放大视角立体结构示意图;
23.图4为本发明的回收机构立体结构示意图;
24.图5为本发明的导料架立体结构示意图;
25.图6为本发明的plc控制器的程序图。
26.附图标记:1、垃圾箱;2、回收机构;201、机架;2011、滑轨;202、滑架;2021、配重块;203、压块;204、壳体;205、液压缸;206、抱闸电机;207、挡板;3、倾泻架组件;301、伺服电机;302、齿轮;303、半齿圈;304、摇臂;305、弧形架;306、立架;4、导料架;5、plc控制器。
具体实施方式
27.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
28.需要注意的是,术语“第一”、“第二”、“对称”、“阵列”等仅用于区分描述与位置描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“对称”等特征的可以明示或者隐含地包括一个或者更多个该特征;同
样,对于未以“两个”、“三只”等文字形式对某些特征进行数量限制时,应注意到该特征同样属于明示或者隐含地包括一个或者更多个特征数量;
29.同时对于方位描述,如术语“外表面”、“外部”、“上表面”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,因此不能理解为限制本发明的具体保护范围;
30.在本发明中,除非另有明确的规定和限定,“安装”、“连接”、“固定”等术语应做广义理解;例如,可以是固定连接,也可以是可拆卸连接,或一体成型;可以是机械连接,可以是直接相连,可以是焊接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据说明书附图结合具体情况理解上述术语在本发明中的具体含义。
31.实施例
32.请参阅图1-6,本发明提供一种技术方案:一种用于垃圾回收点的易腐类垃圾回收装置,包括垃圾箱1及负责带动倾泻垃圾箱1的倾泻架组件3,垃圾箱1的外部设有回收机构2,回收机构2包括机架201、滑架202、压块203、壳体204和液压缸205;
33.液压缸205的外表面安装于机架201的上部,滑架202的外表面与机架201的外表面滑动连接,压块203的外表面安装于滑架202的内侧壁,壳体204的内侧壁顶部与底部均为通槽结构,壳体204的内侧壁与压块203的外表面相适配,液压缸205的活塞杆与滑架202的顶部固定连接;
34.液压缸205推动滑架202相对于机架201向下滑动,压块203对壳体204的内侧壁内的垃圾进行压制。
35.机架201的外表面安装有plc控制器5;
36.plc控制器5负责控制所有电器元件。
37.本实施例中,具体的:滑架202的内侧壁安装有配重块2021;
38.配重块2021负责辅助增加对垃圾的压强,辅助完成压制需求。
39.本实施例中,具体的:机架201的外表面安装有滑轨2011,滑架202的内侧壁与滑轨2011的外表面滑动连接;
40.滑架202通过滑轨2011实现与机架201的外表面进行滑动连接,保障机构间的运行平稳性及使用效果。
41.本实施例中,具体的:回收机构2还包括抱闸电机206和挡板207;
42.抱闸电机206的输出轴与挡板207的外表面固定连接,抱闸电机206的外表面安装于机架201的外表面,挡板207的顶部与壳体204的底部相适配;
43.抱闸电机206驱动挡板207负责实现对壳体204底部的开启或关闭,进而实现对垃圾进行压制过程中,对壳体204底部形成机械式自锁,辅助完成压制作业;压制完成后,启动抱闸电机206则可以对已经成为饼装或块状的垃圾进行卸料。
44.本实施例中,具体的:倾泻架组件3包括伺服电机301、齿轮302、半齿圈303,不少于三个的摇臂304,弧形架305和立架306;
45.伺服电机301的外表面安装于立架306的外表面,半齿圈303的外表面与立架306的内侧壁滑动连接,伺服电机301的输出轴与齿轮302的内侧壁固定连接,齿轮302的轮齿与半
齿圈303的轮齿啮合,摇臂304的外表面一端与半齿圈303的外表面连接,摇臂304的外表面另一端与弧形架305的外表面连接,弧形架305的内侧壁与垃圾箱1的外表面固定连接;
46.倾泻架组件3负责带动倾泻垃圾箱1进行第一次卸料,其中由伺服电机301驱动齿轮302带动半齿圈303进行旋转,半齿圈303带动每组摇臂304对弧形架305进行角度调节,进而带动垃圾箱1倾斜,完成对垃圾的倾泻。
47.本实施例中,具体的:弧形架305的外表面设有导料架4,导料架4的内侧壁为倾斜漏斗形,导料架4的内侧壁倾斜面在水平面投影下,与壳体204的内侧壁投影相互重合;
48.垃圾箱1倾斜将垃圾卸料于导料架4内时,导料架4负责将垃圾导入壳体204的内侧壁。
49.本实施例中,具体的:本装置的整体电器元件由市电进行供电。
50.本实施例中,请参阅图6,本发明的plc控制器的程序图:图中x0为启动按钮,x1为急停按钮,m0为继电器,y1为伺服电机301,y2为液压缸205,y3为抱闸电机206;
51.使用时,按下x0,x1启动m0,m0互锁启动y1,y1对自身进行自锁,同时t0开始进行15秒计时;即第二行逻辑树为伺服电机301驱动倾泻架组件3整体对导料架4进行第一次卸料,垃圾进入壳体204内部;
52.随后,t0结束计时,断开y1,并启动y2,y2自身自锁,并启动t1进行15秒计时;即第三行逻辑树为第一次卸料结束,伺服电机301带动倾泻架组件3整体复位,同时液压缸205推动滑架202相对于机架201向下滑动,压块203对壳体204的内侧壁内的垃圾进行压制;
53.随后,t1计时结束,断开y2,并启动y3,y3自身自锁,并启动t2进行计时;即第四行逻辑树为液压缸205进行复位,同时抱闸电机206驱动挡板207负责实现对壳体204底部开启,对已经成为饼装或块状的垃圾进行第二次卸料;
54.当t2的计时结束后,t2互锁断开y3并启动第二行逻辑树的t2互锁触点,再次激活启动y1,第二行逻辑树再次启动,并以此达到循环往复效果;即第二次卸料结束时,继续对垃圾箱1内剩余的垃圾进行第一次卸料、压制与第二次卸料,达到自动化处理的效果。
55.工作原理或者结构原理:垃圾由人为丢掷于垃圾箱1内进行储存;当需要对其进行回收处理时,工作人员通过启动plc控制器5完成以下回收操作:
56.首先,倾泻架组件3负责带动倾泻垃圾箱1进行第一次卸料,其中由伺服电机301驱动齿轮302带动半齿圈303进行旋转,半齿圈303带动每组摇臂304对弧形架305进行角度调节,进而带动垃圾箱1倾斜,完成对垃圾的倾泻;
57.随后,液压缸205推动滑架202相对于机架201向下滑动,压块203对壳体204的内侧壁内的垃圾进行压制;
58.压制期间,高压强负责挤出易腐垃圾内的水分,并将其由壳体204与挡板207之间的缝隙内挤出,将易腐垃圾的特性转换为干垃圾;
59.随后,抱闸电机206驱动挡板207负责实现对壳体204底部开启,对已经成为饼装或块状的垃圾进行第二次卸料,工作人员可以手动搬运成为饼装或块状的垃圾进行相应处理;
60.随后,第二次卸料结束时,继续对垃圾箱1内剩余的垃圾进行第一次卸料、压制与第二次卸料,达到自动化处理的效果。
61.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1