用于带输送机的测量设备及输送机系统的制作方法
1.本公开涉及用于带输送机的测量设备和输送机系统。
背景技术:
2.通常,输送机为在一定距离内自动且连续地输送材料和制品并且广泛地用于在工厂中输送零件或材料以及移动半成品的机械装置。
3.例如,这种输送机类型包括带输送机(简称为输送机)、辊输送机、台车输送机、轮输送机和橇输送机。它们之中,带输送机为连续输送装置,连续输送装置通过凭借滑轮使带循环来主要在水平或倾斜方向上运输放置在带上的物品,并且例如,带输送机用于在工厂中运输产品材料或物品,或在建筑工地运输土壤、骨料和混凝土。
4.随着输送机的使用时间流逝,由于设备的振动和磨损以及张力的变化,操作条件从初始设定值改变。随着操作条件的变化,则存在因由于振动而引起的固定螺栓的松动所导致的输送机之间的阶差的变化以及由于因带的磨损或拉伸力的连续作用所导致的带拉伸而引起的带的传输速度的变化。当这些操作条件改变时,因为在带上移动的制品的位置改变,所以可能无法进行正确的处理。
5.在本背景技术部分中所公开的以上信息仅用于增强对本发明的背景的理解,并且因此其可包含不形成在本国中对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
6.示例性实施方式实现为正确地测量输送机之间的阶差。
7.示例性实施方式也实现为方便地测量输送机的输送速度。
8.根据示例性实施方式的用于带输送机的测量设备包括多个辊、多个编码器和控制器,多个编码器测量多个辊的旋转量,控制器通过多个辊的每个周长和旋转量来计算带输送机的带的传输速度。
9.多个辊可分别联接到多个编码器的旋转轴。
10.还可包括显示单元,并且控制器可在显示单元上显示传输速度。
11.显示单元可包括划分为多个区的显示区域,并且控制器可在多个区中的每个中显示由多个编码器中的对应的编码器测量的带的传输速度。
12.还可包括检测因多个辊所导致的测量设备的斜度的斜度传感器,并且控制器可通过使用由斜度传感器检测到的斜度来计算多个辊之间的高度差。
13.斜度传感器可为陀螺仪传感器。
14.还可包括容纳斜度传感器和控制器的本体。
15.还可包括与本体联接的手柄以及固定本体和带输送机的固定构件。
16.固定构件可布置在根据带输送机的带的传输方向的前面处。
17.固定构件可布置在根据带输送机的带的传输方向的后面处。
18.带的传输速度可在计算多个辊之间的高度差之后计算。
19.多个辊的圆周表面上可布置有用于防止带打滑的摩擦构件。
20.根据示例性实施方式的输送机系统包括至少一个后带、至少一个前带、驱动电机和测量单元,至少一个后带布置在传输方向的后面处,至少一个前带与至少一个后带分离并且布置在传输方向的前面处,驱动电机分别驱动至少一个后带和至少一个前带,并且测量单元用于测量至少一个后带和至少一个前带的传输速度,其中,测量单元包括多个辊、多个编码器和控制器,多个辊分别对应于至少一个后带和至少一个前带,多个编码器用于测量多个辊的旋转量,控制器用于通过多个辊的每个周长和旋转量来计算至少一个后带和至少一个前带的传输速度。
21.多个辊可分别联接到多个编码器的旋转轴。
22.还可包括显示单元,并且控制器可在显示单元上显示传输速度。
23.显示单元可包括划分为多个区的显示区域,并且控制器可在多个区上显示由对应的编码器测量的至少一个后带和至少一个前带的传输速度。
24.还可包括检测斜度的斜度传感器,并且控制器可使用由斜度传感器检测到的斜度来计算多个辊之间的高度差。
25.还可包括容纳斜度传感器和控制器的本体以及用于固定本体和带输送机的固定构件。
26.带的传输速度可在计算多个辊之间的高度差之后计算。
27.多个辊的圆周表面上可布置有用于防止带打滑的摩擦构件。
28.根据示例性实施方式的用于带输送机的测量方法包括:布置与带输送机的带对应的多个辊;通过斜度传感器检测根据多个辊的高度差的斜度;使用斜度来计算高度差;通过多个编码器测量多个辊的旋转量;通过多个辊的每个周长和旋转量来计算带输送机的带的传输速度;以及显示高度差和传输速度。
29.根据示例性实施方式,存在改善在使用输送机的产品的生产现场的工人的工作效率的效果。
30.根据示例性实施方式,存在改善在输送机上运载的产品的品质的效果。
附图说明
31.图1是示出输送机之间的不同的传输速度的视图。
32.图2是示出输送机之间的阶差的视图。
33.图3和图4是示出根据示例性实施方式的测量设备布置在输送机上的情况的视图。
34.图5是根据示例性实施方式的测量设备的框图。
35.图6和图7是示出根据示例性实施方式的测量设备的视图。
36.图8是示出根据示例性实施方式的使用测量设备的带输送机调节方法的流程图。
具体实施方式
37.在下文中,将参照示出了本发明的示例性实施方式的附图来对本发明进行更全面描述。本领域普通技术人员将意识到的是,所描述的实施方式可以各种不同的方式进行修改,而全部不背离本发明的精神或范围。
38.为了清楚地描述本发明,将省略与描述无关的部分。在整个说明书中,相似的附图
标记表示相似的元件。
39.此外,附图中所示的每个配置的尺寸和厚度为了更好地理解和易于描述而被任意地示出,但是本发明不限于此。在附图中,为了清楚起见,层、膜、面板、区等的厚度被夸大。在附图中,为了更好地理解和易于描述,一些层和区域的厚度被夸大。
40.将理解的是,当诸如层、膜、区或衬底的元件被称为在另一元件“上”时,该元件可直接在另一元件上,或者也可存在中间元件。相反,当元件被称为“直接”在另一元件“上”时,则不存在中间元件。另外,在本说明书中,措辞“上(on)”或“上方(above)”意味着定位在对象部上或下方,并且在本质上不意味着基于重力方向而定位在对象部的上侧上。
41.此外,除非另有明确相反的描述,否则措辞“包括(comprise)”以及诸如“包括(comprises)”或“包括(comprising)”的变体将被理解为暗指包含所述元件,但是不排除任何其它元件。
42.此外,在说明书中,词语“在平面视图中”意味着当从上方观察对象部时,并且词语“在剖面视图中”意味着当从侧面观察通过垂直地切割对象部而取得的剖面时。
43.图1是示出输送机之间的不同的传输速度的视图。
44.如图1中所示,输送机系统1可包括在传输方向a的后面处的输送机10和输送机14以及在传输方向a的前面处的输送机12和输送机16。
45.多个输送机10、12、14和16可分别包括多个辊102、122、142和162(分别对应于多个带104、124、144和164)。多个辊102、122、142和162可通过多个带104、124、144和164的移动而旋转。即,多个辊102、122、142和162不用于移动多个带104、124、144和164。在另一实施方式中,多个辊102、122、142和162可连接到驱动电机并且因驱动电机而旋转以使多个带104、124、144和164旋转。在这种情况下,多个辊102、122、142和162用于移动多个带104、124、144和164。
46.多个带104、124、144和164使对象20在传输方向a上移动。对象20布置在多个带104、124、144和164上。布置在传输方向a的前面处的带124和带164以及布置在传输方向a的后面处的带104和带144彼此间隔开预定间距。多个带104、124、144和164以预定传输速度驱动,以使对象20在传输方向a上移动。例如,带104的传输速度为v1(mm/s),带124的传输速度为v2(mm/s),带144的传输速度为v3(mm/s),并且带164的传输速度为v4(mm/s)。
47.多个带104、124、144和164的多个传输速度v1、v2、v3和v4可由驱动电机的旋转速度来确定,而驱动电机的旋转速度驱动为使多个带104、124、144和164中的每个移动。驱动电机的旋转速度可由输送机系统1的管理者确定。
48.然而,由于因多个带104、124、144和164的磨损或拉伸力的连续作用所导致的带的拉伸变化,即使驱动电机以相同的旋转速度驱动,多个带104、124、144和164的传输速度也会改变。即,即使驱动电机由管理者保持预定的旋转速度,多个带104、124、144和164中的每个的传输速度也可为不同的。然后,多个带104、124、144和164上方的对象20可旋转,或者多个带104、124、144和164上方的对象20的相对位置可改变。
49.图2是示出输送机之间的阶差的视图。
50.传输方向a的后面处的输送机10与传输方向a的前面处的输送机12之间可存在阶差h1。阶差h1可在安装输送机10和12时设计,或者可由管理者调节。
51.然而,如果因振动而固定输送机10和12的固定构件由于设备的振动或发生故障而
松动,则阶差h1可改变。因改变的阶差h1,多个带104、124、144和164上的对象20旋转,或者多个带104、124、144和164上的对象20的相对位置可改变。
52.如果多个带104、124、144和164上方的对象20旋转和/或其位置改变,则该过程可能无法精确地进行,并且产品品质可能劣化。因此,当布置为彼此联系的多个带104、124、144和164中的每个的传输速度和/或带104和带144与带124和带164之间的阶差改变时,其应调节为预定值。以下对精确并且方便地测量传输速度和阶差的变化的测量设备进行描述。
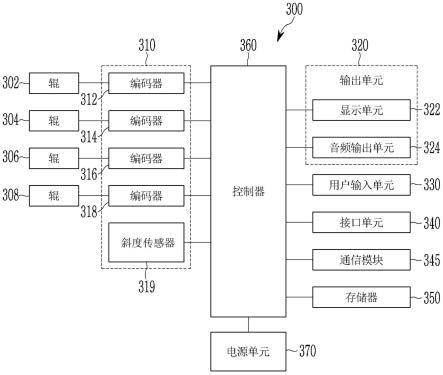
53.图3是根据示例性实施方式的测量设备300的框图。
54.测量设备300可包括传感器单元310、输出单元320、用户输入单元330、接口单元340、通信模块345、控制器360和电源单元370。由于图3中所示的构成元件对于实现测量设备300不是必不可少的,因此在本说明书中描述的测量设备300可具有比以上列出的构成元件更多或更少的构成元件。
55.详细地,传感器单元310可包括用于感测输送机系统1的至少一个传感器。例如,传感器单元310可包括至少一个编码器312、314、316和318以及斜度传感器319(例如,陀螺仪传感器)之中的至少一个以及电池电量表。与此同时,可通过对由这些传感器中的至少两个或更多个感测的信息进行组合来利用本公开的测量设备300。
56.多个编码器312、314、316和318中的每个连接到多个辊302、304、306和308之中对应的辊。多个编码器312、314、316和318为旋转编码器,并且可对连接有多个辊302、304、306和308的旋转轴的旋转量、旋转角度和旋转方向进行检测。现在参照图4和图5对多个辊302、304、306和308进行描述。
57.图4和图5是示出根据示例性实施方式的测量设备布置在输送机上的情况的视图。
58.如图4和图5中所示,多个辊302、304、306和308可分别布置在多个带104、124、144和164之中对应的带处。在图3至图5中,由于带的数量为4个,因此解释为存在4个辊和编码器,然而如果在传输方向a的前面/后面处分别布置有一个输送机,则由于带的数量为2个,因此可存在2个辊和编码器。测量设备300可具有与带的数量对应的辊和编码器的数量。然而,当然,通过使用具有4个辊和编码器的测量设备300来测量两个带的传输速度和阶差是可能的。
59.如图4中所示,摩擦构件3020和摩擦构件3040可分别布置为防止带104和带124在辊302和辊304的圆周表面处的打滑。尽管未在图4中示出,但是这样的摩擦构件(例如,图7的3060和图6的3080)也可布置在辊306和辊308的圆周表面处。
60.如果多个带104、124、144和164旋转,则对应的多个辊302、304、306和308旋转,并且多个编码器312、314、316和318可测量多个辊302、304、306和308的旋转量和旋转角度。
61.斜度传感器319可测量因多个辊302、304、306和308所导致的测量设备300的斜度。斜度传感器319包括重力传感器、陀螺仪传感器等。
62.接着,输出单元320用于生成与视觉、听觉或触觉相关的输出,并且可包括显示单元322和音频输出单元324。
63.显示单元322显示(输出)在测量设备300中处理的信息。例如,显示单元322可显示由测量设备300驱动的应用程序的执行屏幕信息、或者可显示根据执行屏幕信息的用户界面(user interface,ui)和图形用户界面(graphic user interface,gui)信息。根据测量
设备300的实施类型,可提供两个或更多个显示单元322。
64.显示单元322可包括液晶显示器(liquid crystal display,lcd)、薄膜晶体管液晶显示器(thin film transistor liquid crystal display,tft lcd)、有机发光二极管(organic light emitting diode,oled)和电子墨水显示器中的至少一种。
65.音频输出单元324可将存储在存储器350中的音频数据输出为声音,并且可以输出各种警报声音或多媒体再现声音的扬声器的形式来实现。
66.另外,输出单元320还可包括光学输出单元,而光学输出单元通过使用作为光源的光来输出通知事件的发生的信号。
67.接着,用户输入单元330用于从用户接收信息,并且如果该信息是通过用户输入单元330输入的,则控制器360可控制测量设备300的操作,以对应于输入的信息。用户输入单元330可包括机械输入方式(或机械键(例如,布置在测量设备300的前面、后面或侧面上的按钮)、测量设备300的边框或顶端、凸圆开关、缓动轮、缓动开关等)和触摸型输入方式。作为实例,触摸型输入方式由通过软件处理而显示在触摸屏上的虚拟键、软键或可视键构成,或者可由布置在触摸屏以外的部分上的触摸键制成。另一方面,虚拟键或可视键可在具有各种形式的同时显示在触摸屏上,例如,其可由图形、文本、图标、视频或它们的组合形成。
68.接口单元340用作与连接到测量设备300的各种类型的外部装置的通道。接口单元340可包括外部充电器端口、有线/无线数据端口和存储卡端口中的至少一种。在测量设备300中,响应于连接到接口单元340的外部装置,可执行与连接的外部装置相关的适当控制。
69.通信模块345主要用于短距离通信,并且可通过使用蓝牙(bluetooth
tm
)、射频识别(radio frequency identification,rfid)、红外数据协会(infrared data association,irda)、超宽带(ultra wide band,uwb)、zigbee、近场通信(near field communication,nfc)、无线保真(wireless-fidelity,wi-fi)、wi-fi直连和无线通用串行总线(universal serial bus,usb)技术之中的至少一种来支持短距离通信。通信模块345可支持测量设备300与具有无线通信功能的装置之间的无线通信、或者测量设备300与通过无线局域网来布置外部服务器的网络之间的无线通信。无线局域网可为无线个人区域网。
70.此处,具有无线通信功能的装置可为能够与根据本发明的测量设备300交换(或互锁)数据的移动终端(例如,智能电话、平板电脑、膝上型电脑(笔记本电脑)等)。通信模块345可在测量设备300周围感测(或识别)能够与测量设备300通信的具有无线通信功能的装置。此外,当经感测的具有无线通信功能的装置为认证为与根据示例性实施方式的测量设备300通信的装置时,控制器360可通过通信模块345将由测量设备300处理的数据的至少一部分传输到具有无线通信功能的装置。相应地,具有无线通信功能的装置的用户可通过具有无线通信功能的装置来使用由测量设备300处理的数据。
71.存储器350存储支持测量设备300的各种功能的数据。存储器350可存储在测量设备300中驱动的固件、应用程序、用于测量设备300的操作的数据和命令。这些应用程序中的至少一些可从发货时开始存在于测量设备300上,以用于测量设备300的基本功能。另外,这些应用程序中的至少一些可通过接口单元340下载。与此同时,应用程序可存储在存储器350中,安装在测量设备300上,并且由控制器360驱动以执行测量设备300的操作(或功能)。
72.除了与应用程序相关的操作以外,控制器360通常还控制测量设备300的整体操作。通过对通过以上讨论的构成元件而输入或输出的信号、数据、信息等进行处理或者通过
驱动存储在存储器350中的应用程序,控制器360可将适当的信息或功能提供给用户,或者为用户处理适当的信息或功能。
73.另外,控制器360可控制与图3一起检查的构成元件中的至少一些,以驱动存储在存储器350中的应用程序。此外,为了驱动应用程序,控制器360可通过将包括在测量设备300中的构成元件中的至少两个或更多个彼此组合来操作。
74.控制器360可通过使用斜度传感器319安装的位置、多个辊302、304、306和308安装的位置以及由斜度传感器319测量的斜度来分别计算多个辊302、304、306和308之间的高度差。例如,控制器360可计算多个辊302、304、306和308之中的两个辊之间的高度差。
75.控制器360可通过使用从多个编码器312、314、316和318测量的旋转量来计算多个带104、124、144和164的传输速度。例如,控制器360可通过多个辊302、304、306和308的周长和旋转量来计算多个带104、124、144和164的传输距离,以计算多个带104、124、144和164的传输速度。
76.电源单元370在控制器360的控制下接收外部电力或内部电力,以将电力供给到包括在测量设备300中的每个构成元件。这个电源单元370包括电池,并且电池可为内置电池或可更换电池。
77.构成元件中的至少一些可彼此协作地操作,以实现根据以下描述的各种示例性实施方式的测量设备300的操作、控制或控制方法。另外,可通过驱动存储在存储器350中的至少一个应用程序来在测量设备300上实现测量设备300的操作、控制或控制方法。
78.图6和图7是示出根据示例性实施方式的测量设备300的视图。
79.参照图6和图7,测量设备300可包括容纳诸如斜度传感器319、存储器350、控制器360和电源单元370的电气部件的本体301、固定到本体301的四个编码器312、314、316和318、联接到多个编码器312、314、316和318的旋转轴的四个辊302、304、306和308、联接到本体301的手柄380、联接到本体301并且固定本体301和多个输送机10、12、14和16的固定构件390以及布置在本体301的一个表面上的显示单元322。由于图6和图7中所示的构成元件对于实现测量设备300不是必不可少的,因此在本说明书中描述的测量设备300可具有比以上列出的构成元件更多或更少的构成元件。
80.如图6所示,固定构件390可联接到在传输方向a的前面处的输送机12和输送机16。在另一实施例中,如图7中所示,固定构件390可联接到在传输方向a的后面处的输送机10和输送机14。
81.接着,参照图8对根据示例性实施方式的带输送机调节方法进行描述。
82.图8是示出根据示例性实施方式的使用测量设备300的带输送机调节方法的流程图。
83.用户(或管理员)第一次将固定构件390安装在输送机上(s100)。在第一次安装(s100)中,测量设备300可测量多个带104、124、144和164之间的高度差。由于输送机的高度可在测量高度差之后调节,因此固定构件390可松动地联接到输送机。
84.测量设备300测量多个带104、124、144和164之间的高度差(s110)。斜度传感器319可测量因多个辊302、304、306和308所导致的测量设备300的斜度,并且控制器360可通过使用斜度传感器319的安装位置、多个辊302、304、306和308的安装位置关系和由斜度传感器319测量的斜度来分别计算多个辊302、304、306和308之间的高度差。
85.用户调节多个带104、124、144和164之间的高度差(s120)。用户可使用多个辊302、304、306和308之间的高度差来计算多个带104、124、144和164之间的高度差,并且调节最低的带的高度。
86.当带104和带124之间的测量的高度差调节为与预定的阶差(例如,图2中的h1)一致时,用户第二次将固定构件390安装到输送机上(s130)。在第二次安装(s130)中,测量设备300可测量多个带104、124、144和164的速度。固定构件390可刚性地附接到输送机,以使得多个带104、124、144和164与多个辊302、304、306和308可紧密接触。
87.接着,测量设备300测量多个带104、124、144和164的传输速度(s140)。控制器360可通过使用从多个编码器312、314、316和318测量的旋转量来测量多个带104、124、144和164的传输速度。
88.控制器360可在显示单元322上显示计算出的传输速度。在这种情况下,显示单元322的显示区域可划分为与每个编码器对应的多个区,并且控制器360可在每个区中显示多个带104、124、144和164的传输速度。例如,在包括四个编码器的测量设备300的情况下,显示区域划分为四个区,并且显示多个带104、124、144和164的传输速度的每个区对应于每个编码器安装的位置。
89.如果多个带104、124、144和164的传输速度与初始预定值不同,则用户可调节驱动输送机的多个带104、124、144和164的驱动电机的旋转速度(s150),以将多个带104、124、144和164的传输速度调节为初始预定值。
90.在上文中,已描述了测量设备300从输送机系统1可是可移除的,但是测量设备300可通过输送机系统1和固定构件390联接并且可被固定。
91.依据根据示例性实施方式的带输送机的测量设备和带输送机调节方法,可方便地测量输送机之间的阶差和输送机的传输速度。
92.其结果,改善在使用输送机的产品的生产现场的工人的工作效率是可能的,从而改善了由输送机输送的产品的品质。
93.虽然已结合当前被认为是实际的示例性实施方式描述了本发明,但是将理解的是,本发明不限于所公开的实施方式。相反,本发明概念旨在覆盖包括在所附权利要求书的精神和范围内的各种修改和等同布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1