智能化AGV搬运机器人的制作方法
智能化agv搬运机器人
技术领域
1.本发明涉及仓储物料领域,具体为智能化agv搬运机器人。
背景技术:
2.智能仓储是物流过程的一个环节,智能仓储的应用,保证了货物仓库管理各个环节数据输入的速度和准确性,确保企业及时准确地掌握库存的真实数据,合理保持和控制企业库存。通过科学的编码,还可方便地对库存货物的批次、保质期等进行管理,现有的只能仓储中会需要用到agv搬运小车,而现有的搬运小车大部分都无法自主的完成上货、搬运以及卸货的过程,为此我们提出了智能化agv搬运机器人。
技术实现要素:
3.针对现有技术的不足,本发明提供了智能化agv搬运机器人,解决了上述的问题。
4.为实现上述所述目的,本发明提供如下技术方案:智能化agv搬运机器人,包括agv小车,所述agv小车为现有结构,在此不做赘述,所述agv小车的前方设置有可以升降的升降块,所述升降块上安装有运输带二,所述agv小车的顶部壁面安装有与运输带二对应的传输带一,所述agv小车的上方壁面对应传输带一的后侧固定安装有挡板,所述挡板对应传输带一的一侧壁面上固定安装有感应设备,所述agv小车的顶部设置有固定装置,agv小车进行移动,当移动到需要搬运货物处的时候,通过升降块将货物铲起,然后货物顺着运输带二移动到升降块上,然后升降块向上升起,运输带二启动,将货物向后侧移动,直到移动到传输带一上,然后货物顺着传输带一继续向后侧移动,货物与感应设备接触之后,感应设备会受到感应,配合固定装置将货物进行固定,货物运输到之后,固定装置解除固定状态,然后传输带一启动,将货物向前方搬运,升降块升起,货物被传输带一驱动移动到升降块上,然后升降块下降,货物被运输带二再次驱动,移动到升降块外侧,完成卸货,这样的设置能够自主的进行仓储中的搬运、上货以及卸货过程,更加智能方便。
5.优选的,所述agv小车的顶部壁面上固定安装有两个对应的连接杆,连接杆为l形,两个所述连接杆对应升降块的一端固定安装有两个电动伸缩杆一,两个所述电动伸缩杆一的自由端与升降块的上方壁面固定连接在一起,且两个电动伸缩杆一分别位于运输带二的两侧。
6.优选的,所述升降块的顶部壁面上固定安装有两个对应的导向块,且导向块位于运输带二的两侧,两侧的导向块相互靠近的一侧壁面上开设有多组圆形槽,每个所述圆形槽的内部镶嵌有能够滚动的滚珠,当货物经过两个导向块之间的时候,货物的侧边势必会与导向块进行接触,产生摩擦,通过设置了能够滚动的滚珠,当货物经过与其接触的时候,可以减小与导向块的接触面积,减小摩擦,使得货物运输过程中更加顺畅。
7.优选的,所述固定装置包括固定块、连接伸缩杆一、挤压块以及两个活动块,两个所述活动块通过连接伸缩杆二与挤压块连接,且连接伸缩杆二的两端分别与挤压块和活动块铰接在一起,两侧的活动块相互背离的一侧壁面通过铰接有连接伸缩杆二,且其与固定
块的内壁铰接,所述固定块的顶部内壁与连接伸缩杆一固定连接在一起,连接伸缩杆一的下端与挤压块的顶部壁面铰接在一起,所述挤压块的下方壁面开设有多组凹槽,每个所述凹槽的内部均固定安装有橡胶块,当固定块向下移动的时候,挤压块的下壁面会与货物的顶部进行接触,挤压块受到挤压,挤压块向上移动,连接伸缩杆一收缩,带动两侧的活动块向靠近挤压块的一侧倾斜,将货物的侧边夹住,这样的设置可以在向下挤压固定货物的同时,可以对货物的侧边进行固定,减少了货物搬运过程中,货物脱落的过程。
8.优选的,所述固定块的底部壁面固定安装有两个对应的电动伸缩杆二,两个所述电动伸缩杆二的下端与agv小车的顶部壁面固定连接在一起,所述电动伸缩杆二与感应设备电性连接在一起,当货物接触到感应设备的时候电动伸缩杆二会自主向下进行缩回,让固定装置将货物固定,本方案中的电动伸缩杆一进行伸缩、运输带二以及传输带一的前后转动运输过程、卸货时电动伸缩杆二向上升起的操作均由外界控制器进行控制,控制器以及控制系统,均由现有的智能仓储以及智能机器人物流系统组成,为现有技术,在本技术中,不再对其进行详细的公开。
9.与现有技术相比,本发明提供了智能化agv搬运机器人,具备以下优点:1、该仓储搬运机器人,agv小车进行移动,当移动到需要搬运货物处的时候,通过升降块将货物铲起,然后货物顺着运输带二移动到升降块上,然后升降块向上升起,运输带二启动,将货物向后侧移动,直到移动到传输带一上,然后货物顺着传输带一继续向后侧移动,货物与感应设备接触之后,感应设备会受到感应,配合固定装置将货物进行固定,货物运输到之后,固定装置解除固定状态,然后传输带一启动,将货物向前方搬运,升降块升起,货物被传输带一驱动移动到升降块上,然后升降块下降,货物被运输带二再次驱动,移动到升降块外侧,完成卸货,这样的设置能够自主的进行仓储中的搬运、上货以及卸货过程,更加智能方便。
10.2、该仓储搬运机器人,当货物经过两个导向块之间的时候,货物的侧边势必会与导向块进行接触,产生摩擦,通过设置了能够滚动的滚珠,当货物经过与其接触的时候,可以减小与导向块的接触面积,减小摩擦,使得货物运输过程中更加顺畅。
11.3、该仓储搬运机器人,当固定块向下移动的时候,挤压块的下壁面会与货物的顶部进行接触,挤压块受到挤压,挤压块向上移动,连接伸缩杆一收缩,带动两侧的活动块向靠近挤压块的一侧倾斜,将货物的侧边夹住,这样的设置可以在向下挤压固定货物的同时,可以对货物的侧边进行固定,减少了货物搬运过程中,货物脱落的过程。
附图说明
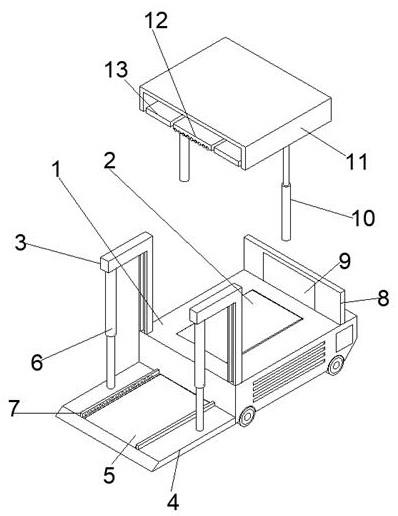
12.图1为本发明立体结构示意图;图2为本发明固定装置结构剖视示意图;图3为本发明导向块俯视剖视示意图。
13.图中:1、agv小车;2、传输带一;3、连接杆;4、升降块;5、运输带二;6、电动伸缩杆一;7、导向块;8、挡板;9、感应设备;10、电动伸缩杆二;11、固定块;12、挤压块;13、活动块;14、连接伸缩杆一;15、连接伸缩杆二;16、凹槽;17、橡胶块;18、圆形槽;19、滚珠。
具体实施方式
14.请参阅图1-3,智能化agv搬运机器人,包括agv小车1,agv小车1为现有结构,在此不做赘,agv小车1的前方设置有可以升降的升降块4,升降块4上安装有运输带二5,agv小车1的顶部壁面安装有与运输带二5对应的传输带一2,agv小车1的上方壁面对应传输带一2的后侧固定安装有挡板8,挡板8对应传输带一2的一侧壁面上固定安装有感应设备9,agv小车1的顶部设置有固定装置,agv小车1进行移动,当移动到需要搬运货物处的时候,通过升降块4将货物铲起,然后货物顺着运输带二5移动到升降块4上,然后升降块4向上升起,运输带二5启动,将货物向后侧移动,直到移动到传输带一2上,然后货物顺着传输带一2继续向后侧移动,货物与感应设备9接触之后,感应设备9会受到感应,配合固定装置将货物进行固定,货物运输到之后,固定装置解除固定状态,然后传输带一2启动,将货物向前方搬运,升降块4升起,货物被传输带一2驱动移动到升降块4上,然后升降块4下降,货物被运输带二5再次驱动,移动到升降块4外侧,完成卸货,这样的设置能够自主的进行仓储中的搬运、上货以及卸货过程,更加智能方便。
15.进一步的,agv小车1的顶部壁面上固定安装有两个对应的连接杆3,连接杆3为l形,两个连接杆3对应升降块4的一端固定安装有两个电动伸缩杆一6,两个电动伸缩杆一6的自由端与升降块4的上方壁面固定连接在一起,且两个电动伸缩杆一6分别位于运输带二5的两侧。
16.进一步的,升降块4的顶部壁面上固定安装有两个对应的导向块7,且导向块7位于运输带二5的两侧,两侧的导向块7相互靠近的一侧壁面上开设有多组圆形槽18,每个圆形槽18的内部镶嵌有能够滚动的滚珠19,当货物经过两个导向块7之间的时候,货物的侧边势必会与导向块7进行接触,产生摩擦,通过设置了能够滚动的滚珠19,当货物经过与其接触的时候,可以减小与导向块7的接触面积,减小摩擦,使得货物运输过程中更加顺畅。
17.进一步的,固定装置包括固定块11、连接伸缩杆一14、挤压块12以及两个活动块13,两个活动块13通过连接伸缩杆二15与挤压块12连接,且连接伸缩杆二15的两端分别与挤压块12和活动块13铰接在一起,两侧的活动块13相互背离的一侧壁面通过铰接有连接伸缩杆二15,且其与固定块11的内壁铰接,固定块11的顶部内壁与连接伸缩杆一14固定连接在一起,连接伸缩杆一14的下端与挤压块12的顶部壁面铰接在一起,挤压块12的下方壁面开设有多组凹槽16,每个凹槽16的内部均固定安装有橡胶块17,当固定块11向下移动的时候,挤压块12的下壁面会与货物的顶部进行接触,挤压块12受到挤压,挤压块12向上移动,连接伸缩杆一14收缩,带动两侧的活动块13向靠近挤压块12的一侧倾斜,将货物的侧边夹住,这样的设置可以在向下挤压固定货物的同时,可以对货物的侧边进行固定,减少了货物搬运过程中,货物脱落的过程。
18.进一步的,固定块11的底部壁面固定安装有两个对应的电动伸缩杆二10,两个电动伸缩杆二10的下端与agv小车1的顶部壁面固定连接在一起,电动伸缩杆二10与感应设备9电性连接在一起,当货物接触到感应设备9的时候电动伸缩杆二10会自主向下进行缩回,让固定装置将货物固定,本方案中的电动伸缩杆一6进行伸缩、运输带二5以及传输带一2的前后转动运输过程、卸货时电动伸缩杆二10向上升起的操作均由外界控制器进行控制,控制器以及控制系统,均由现有的智能仓储以及智能机器人物流系统组成,为现有技术,在本技术中,不再对其进行详细的公开。
19.工作原理:agv小车1进行移动,当移动到需要搬运货物处的时候,通过升降块4将货物铲起,然后货物顺着运输带二5移动到升降块4上,然后升降块4向上升起,运输带二5启动,将货物向后侧移动,直到移动到传输带一2上,然后货物顺着传输带一2继续向后侧移动,货物与感应设备9接触之后,感应设备9会受到感应,配合固定装置将货物进行固定,货物运输到之后,固定装置解除固定状态,然后传输带一2启动,将货物向前方搬运,升降块4升起,货物被传输带一2驱动移动到升降块4上,然后升降块4下降,货物被运输带二5再次驱动,移动到升降块4外侧,完成卸货,这样的设置能够自主的进行仓储中的搬运、上货以及卸货过程,更加智能方便。
20.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1