轨道抓取装置的制作方法
本发明属于铁路轨道领域,特别涉及一种轨道抓取装置。
背景技术:
1、钢轨是铁路轨道的重要组成部分,主要用于引导机车车辆的车轮前进,在长时间使用之后,钢轨会产生一定程度的损伤,直接扔掉比较浪费,需要进行回收再利用,以节省原材料的使用,在钢轨回收作业时,需要使用长轨车将地面上的钢轨从端头处抬起并移动至收轨装置的导槽内,整个过程需要完成钢轨的拾取、起吊、移动等基本动作,是铁路上钢轨回收作业的重要步骤。
2、现有的钢轨回收作业,采用长轨车收轨装置配合人工地面作业的方式,或者采用平衡吊等电动、液动吊具,通过提拉钢丝绳起吊地面上的钢轨,具体操作过程中,采用长轨车收轨装置进行回收作业时,由于长轨车不具备拾取、起吊、移动钢轨的抓轨装置,需要人工利用撬棍和千斤顶撬动钢轨使其移动至收轨导槽上方,或者采用平衡吊等电动、液动等吊具,虽然具有拾取、起吊、移动钢轨的抓轨装置,但是很难实现精准对位,钢轨进入收轨导槽的过程还是要依靠人工推、撬,实现整个钢轨回收作业。
3、但是,由于现有的收轨装置需要人工配合作业或移动钢轨,操作人员靠近钢轨作业存在较大的安全隐患。
技术实现思路
1、针对现有技术的不足,本发明提供了一种轨道抓取装置,能够实现单人远距离操作其完成地面钢轨的拾取、起吊、移动,规避操作人员作业的安全隐患。
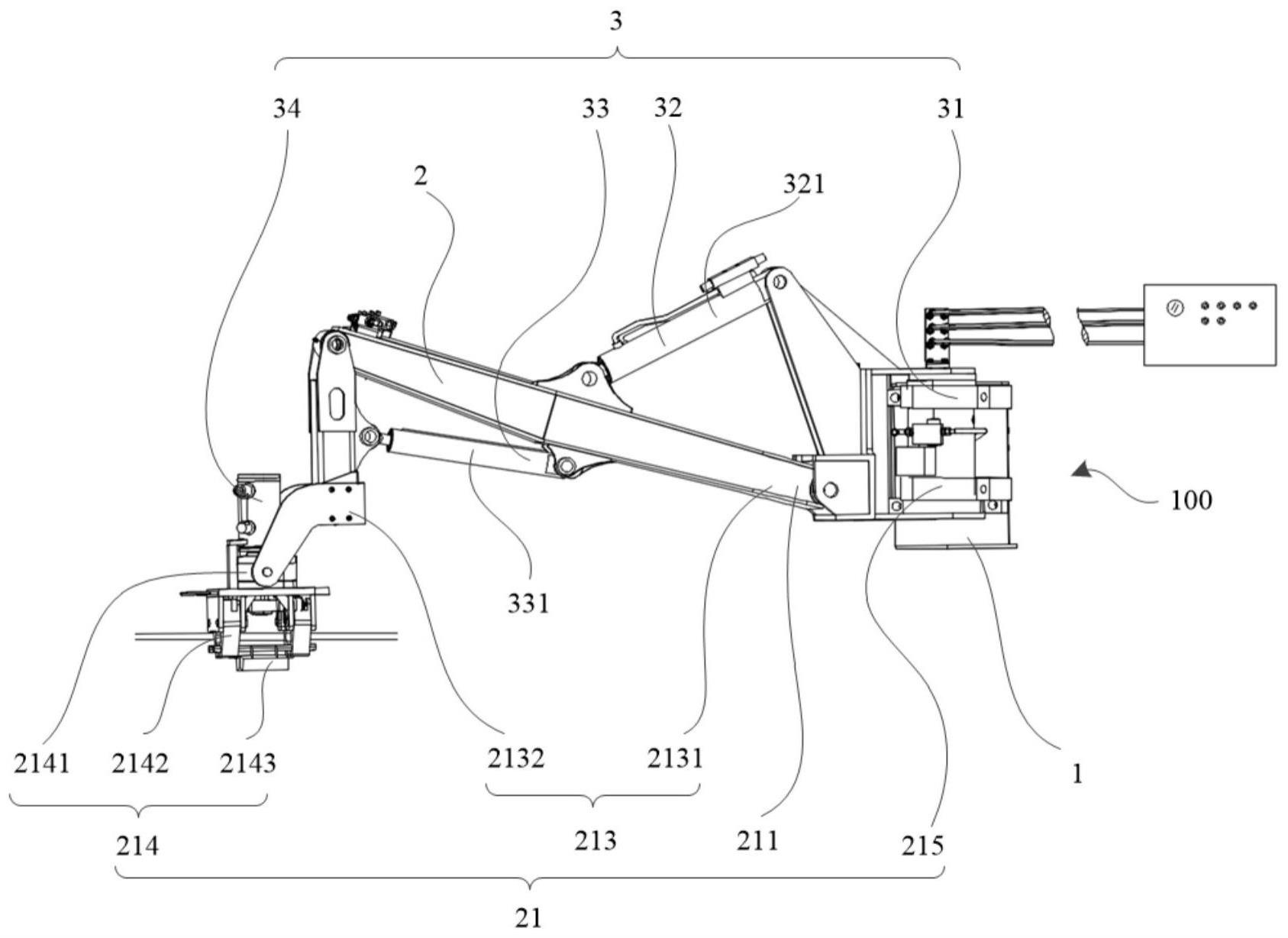
2、本发明提供一种轨道抓取装置,包括基座、机械臂组件和驱动组件,基座和长轨车相对固定,机械臂组件包括两个机械臂单元,各机械臂单元包括依次连接的多个关节臂和连接于最末的关节臂的抓取单元,两个机械臂单元对应的抓取单元用于分别夹持同一轨道的不同轨道段,各关节臂被配置为可相对其它关节臂转动,驱动组件连接于机械臂组件,用于驱动关节臂转动,以使抓取单元相对基座移动至不同位置。
3、可选的,驱动组件包括第一驱动单元,且机械臂单元通过竖直转轴和基座可转动连接,第一驱动单元连接于机械臂单元和基座之间,用于驱动机械臂单元绕竖直转轴转动。
4、可选的,机械臂单元中的多个关节臂包括第一关节臂和第二关节臂,第一关节臂的第一端通过第一水平转轴可转动的设置于基座上,第二关节臂的第一端和第一关节臂的第二端通过第二水平转轴铰接,抓取单元设置于第二关节臂的第二端。
5、可选的,驱动组件包括第二驱动单元和第三驱动单元,第二驱动单元连接于第一关节臂和基座之间,用于驱动第一关节臂相对基座绕第一水平转轴转动,第三驱动单元连接于第一关节臂和第二关节臂之间,用于驱动第二关节臂相对第一关节臂绕第二水平转轴转动。
6、可选的,第一驱动单元、第二驱动单元和第三驱动单元的至少一者为液压驱动单元。
7、可选的,机械臂单元还包括第一转动座,第一转动座通过竖直转轴和基座可转动连接,且第一关节臂的第一端通过第一水平转轴铰接于第一转动座,第二驱动单元包括第一动作筒,第一动作筒的两端分别连接于第一转动座和第一关节臂,以用于通过第一动作筒的伸缩驱动第一关节臂绕第一水平转轴转动。
8、可选的,第三驱动单元包括第二动作筒,第二动作筒的两端分别连接于第一关节臂和第二关节臂,以用于通过第二动作筒的伸缩驱动第二关节臂绕第二水平转轴转动。
9、可选的,抓取单元包括第二转动座和设置于第二转动座上的第四驱动单元,第二转动座和机械臂单元中最末的关节臂可转动连接,第四驱动单元连接于夹持钳,用于驱动夹持钳的开合。
10、可选的,抓取单元还包括设置于第四驱动单元上的至少两个夹持钳和两个夹持块,夹持钳包括相对设置的两个钳臂,两个钳臂可相对开合以夹持轨道,至少两个夹持钳并列设置,且至少两个夹持钳的夹持方向相同,以使至少两个夹持钳分别夹持于轨道的不同段上,两个夹持块分别和各夹持钳的相对两侧钳臂连接,以用于夹持在轨道的轨腰侧方,且至少两个夹持钳的同侧钳臂均和同一夹持块连接。
11、可选的,各钳臂的内缘均设有向另一夹持臂凸出的抵接部,夹持钳合拢时,抵接部用于夹持在轨道的轨头下缘。
12、本发明提供一种轨道抓取装置,包括基座、机械臂组件和驱动组件,基座和长轨车相对固定,机械臂组件包括两个机械臂单元,各机械臂单元包括依次连接的多个关节臂和连接于最末的关节臂的抓取单元,两个机械臂单元对应的抓取单元用于分别夹持同一轨道的不同轨道段,各关节臂被配置为可相对其它关节臂转动,驱动组件连接于机械臂组件,用于驱动关节臂转动,以使抓取单元相对基座移动至不同位置,这样轨道抓取装置,能够实现单人远距离操作其完成地面钢轨的拾取、起吊、移动,规避操作人员作业的安全隐患。
技术特征:
1.一种轨道抓取装置,其特征在于,包括基座、机械臂组件和驱动组件,所述基座和长轨车相对固定,所述机械臂组件包括两个机械臂单元,各所述机械臂单元包括依次连接的多个关节臂和连接于最末的所述关节臂的抓取单元,两个所述机械臂单元对应的所述抓取单元用于分别夹持同一所述轨道的不同轨道段;各所述关节臂被配置为可相对其它关节臂转动,所述驱动组件连接于所述机械臂组件,用于驱动所述关节臂转动,以使所述抓取单元相对所述基座移动至不同位置。
2.根据权利要求1所述的轨道抓取装置,其特征在于,所述驱动组件包括第一驱动单元,且所述机械臂单元通过竖直转轴和所述基座可转动连接,所述第一驱动单元连接于所述机械臂单元和所述基座之间,用于驱动所述机械臂单元绕所述竖直转轴转动。
3.根据权利要求2所述的轨道抓取装置,其特征在于,所述机械臂单元中的多个所述关节臂包括第一关节臂和第二关节臂,所述第一关节臂的第一端通过第一水平转轴可转动的设置于所述基座上,所述第二关节臂的第一端和所述第一关节臂的第二端通过第二水平转轴铰接;所述抓取单元设置于所述第二关节臂的第二端。
4.根据权利要求3所述的轨道抓取装置,其特征在于,所述驱动组件包括第二驱动单元和第三驱动单元,所述第二驱动单元连接于所述第一关节臂和所述基座之间,用于驱动所述第一关节臂相对所述基座绕所述第一水平转轴转动,所述第三驱动单元连接于所述第一关节臂和所述第二关节臂之间,用于驱动所述第二关节臂相对所述第一关节臂绕所述第二水平转轴转动。
5.根据权利要求4所述的轨道抓取装置,其特征在于,所述第一驱动单元、所述第二驱动单元和所述第三驱动单元的至少一者为液压驱动单元。
6.根据权利要求4或5所述的轨道抓取装置,其特征在于,所述机械臂单元还包括第一转动座,所述第一转动座通过所述竖直转轴和所述基座可转动连接,且所述第一关节臂的第一端通过所述第一水平转轴铰接于所述第一转动座;
7.根据权利要求4或5所述的轨道抓取装置,其特征在于,所述第三驱动单元包括第二动作筒,所述第二动作筒的两端分别连接于所述第一关节臂和所述第二关节臂,以用于通过所述第二动作筒的伸缩驱动所述第二关节臂绕所述第二水平转轴转动。
8.根据权利要求1-4任一项所述的轨道抓取装置,其特征在于,所述抓取单元包括第二转动座和设置于所述第二转动座上的第四驱动单元,所述第二转动座和所述机械臂单元中最末的所述关节臂可转动连接,所述第四驱动单元连接于夹持钳,用于驱动所述夹持钳的开合。
9.根据权利要求8所述的轨道抓取装置,其特征在于,所述抓取单元还包括设置于所述第四驱动单元上的至少两个夹持钳和两个夹持块,所述夹持钳包括相对设置的两个钳臂,两个所述钳臂可相对开合以夹持所述轨道,所述至少两个夹持钳并列设置,且所述至少两个夹持钳的夹持方向相同,以使所述至少两个夹持钳分别夹持于所述轨道的不同段上,两个所述夹持块分别和各所述夹持钳的相对两侧钳臂连接,以用于夹持在所述轨道的轨腰侧方,且所述至少两个夹持钳的同侧钳臂均和同一所述夹持块连接。
10.根据权利要求9所述的轨道抓取装置,其特征在于,各所述钳臂的内缘均设有向另一所述夹持臂凸出的抵接部;
技术总结
本发明提供一种轨道抓取装置,包括基座、机械臂组件和驱动组件,所述基座和长轨车相对固定,所述机械臂组件包括两个机械臂单元,各所述机械臂单元包括依次连接的多个关节臂和连接于最末的所述关节臂的抓取单元,两个所述机械臂单元对应的所述抓取单元用于分别夹持同一所述轨道的不同轨道段;各所述关节臂被配置为可相对其它关节臂转动,所述驱动组件连接于所述机械臂组件,用于驱动所述关节臂转动,以使所述抓取单元相对所述基座移动至不同位置。本发明能够规避操作人员作业的安全隐患。
技术研发人员:陈志民,王思聪,高峻,于成洋
受保护的技术使用者:中车沈阳机车车辆有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!