一种厨余垃圾处理箱的制作方法
1.本发明涉及厨余垃圾处理技术领域,尤其涉及一种厨余垃圾处理箱。
背景技术:
2.厨余垃圾含有大量有机物且易腐败发臭,因此,在垃圾的回收过程中,需要对厨余垃圾进行单独收集,以此来减少垃圾处理时垃圾中有机物的量,进而减少臭气和垃圾渗滤液的产生,也可以避免水分过多对垃圾焚烧处理造成的不利影响,降低了对设备的腐蚀。
3.同时,厨余垃圾具有较大的资源价值,高有机物含量的特点使其经过严格处理后可作为肥料、饲料,也可产生沼气用作燃料或发电,油脂部分则可用于制备生物燃料。
4.然而目前居民对垃圾分类的意识还不够强烈,在丢弃垃圾时,仍然将厨余垃圾其他垃圾一起丢弃,产生恶臭,造成环境污染。即使加强了垃圾分类意识的宣传,放置了各个类别的垃圾桶,人们为了自己在垃圾收集时更加方便,仍然会将厨余垃圾混合其他垃圾一起丢弃,为后续的垃圾处理带来了难处。
5.现有的垃圾处理装置只是会做简易的垃圾分类处理,无法精确辨识和追踪投放人,当居民将厨余垃圾混合其它垃圾丢弃或在厨余垃圾中掺杂了杂物时,无法给予居民反馈,就无法提高居民垃圾分类意识和垃圾分类的社会责任感。此外,即使居民有较强的垃圾分类意识,由于厨余垃圾更加粘稠且易腐败,居民通常会用塑料袋收集厨余垃圾,当厨余垃圾丢弃后,现有的垃圾处理装置会将塑料袋一起分类到厨余垃圾里,在后续的垃圾处理中,需要人工将塑料袋去除,浪费大量人力物力。
技术实现要素:
6.针对现有技术中的上述问题,本发明提供了一种厨余垃圾处理箱,解决了现有技术中的垃圾处理装置无法给予用户垃圾信息反馈,以及后续的垃圾处理中,需要人工将塑料袋去除的问题。
7.为了达到上述发明目的,本发明采用的技术方案如下:
8.提供一种厨余垃圾处理箱,其包括箱体和垃圾桶,箱体侧面上设置有带无线通信模块的触摸工控电脑和用于放置垃圾桶的投放口,箱体内设置有接料台,接料台一侧放置有回收桶,接料台下方安装有翻转机构,接料台远离回收桶一侧设置有清洗机构,投放口、接料台和清洗机构之间设置有垃圾桶搬运机构,接料台上方设置有与触摸工控电脑电性连接的图像采集器。
9.进一步地,垃圾桶搬运机构包括设置于接料台侧方的第一机械臂和设置于清洗机构上方的第二机械臂,第一机械臂通过第一导轨安装于箱体顶部,第二机械臂通过第二导轨安装于清洗机构两侧的升降架上,第一导轨两端分别延伸至投放口的上方和第二导轨的上方,第一导轨、第二导轨和升降架上均安装有与触摸工控电脑电性连接的驱动装置。当用户将垃圾桶放入投放口后,由第一机械臂抓取垃圾桶并送至接料台侧方并完成垃圾倾倒,垃圾倾倒结束后,再送至远离第二导轨处,由第二机械臂抓取垃圾桶送入清洗装置中清洗;
将垃圾倾倒和垃圾桶清洗的过程分为两段,使得倾倒部分和清洗部分不必在一条直线上,合理运用箱体内的空间,使箱体内的布局更加紧凑,减小箱体的体积。
10.进一步地,投放口下方设置有垃圾桶暂存柜,清洗机构两侧还设置有相平行的第三导轨,升降架安装于第三导轨上,第三导轨上安装有与触摸工控电脑电性连接的驱动装置,第三导轨远离清洗机构的一端延伸至垃圾桶暂存柜下方。可以在垃圾暂存柜中存储多个垃圾桶,在垃圾桶清洗的过程中,可以立刻通过垃圾桶搬运机构从垃圾桶暂存柜中取出干净的垃圾桶给予用户,减少用户的等待时间,;当垃圾桶清洗完成后,将湿漉的垃圾桶放入垃圾桶暂存柜中暂存并晾干,避免用户拿到湿漉的垃圾桶,同时,可以形成一个垃圾桶的暂存循环,给用户带来更好的使用体验。
11.进一步地,垃圾桶暂存柜设置有多个暂存单元格,暂存单元格底部均设置为格栅板。方便晾干湿漉的垃圾桶,使得积水可以直接从暂存单元格下方排出。
12.进一步地,暂存单元格侧壁上安装有紫外线杀菌灯。通过紫外线杀菌灯对垃圾桶进行消毒杀菌,保护用户的身体健康,给用户带来更加安全的使用体验。
13.进一步地,暂存单元格一侧设置有线管安装室。通过线管安装室将箱体内设备的电、气、水线管集中安装,使得箱体内设备的结构更加紧凑,也避免了接线混乱,提高了装置的安全性。
14.进一步地,垃圾桶底部安装有fird感应卡,投放口底部安装有与触摸工控电脑电性连接的射频读卡器和重力传感器。当用户将垃圾桶放入投放口后,通过射频读卡器读取fird感应卡的信息,判断是否为本装置专用垃圾桶,避免装置内的设备随意启动并抓取投放物送入箱体内,对箱体内的设备带来不必要的损害,提高了装置的安全性;重力传感器可以对垃圾桶进行称重并将重量信息传输至触摸工控电脑,再由触摸工控电脑录入用户信息中,使得设备的后台人员掌握用户的使用情况更加方便。
15.进一步地,回收桶上方安装有伸缩盖板,伸缩盖板上安装有与触摸工控电脑电性连接的驱动装置。当厨余垃圾倒入回收桶中后,通过伸缩盖板上的驱动装置控制伸缩盖板将回收桶封盖,放止回收桶内的臭味溢出,污染环境。
16.进一步地,回收桶底部和顶部分别安装有重力传感器和距离传感器。通过重力传感器和距离传感器实时把控回收桶内厨余垃圾的重量信息和高度信息,避免回收桶中的厨余垃圾过载,当达到装载阈值时,可及时通知工作人员进行更换回收桶。
17.进一步地,箱体上安装有与触摸工控电脑电性连接的id读卡器和指示灯。用户除了可以通过触摸工控电脑进行身份信息登录以外,还可以通过id读卡器进行刷卡;当用户出现错误操作时,可通过指示灯给予用户提示,此外,用户垃圾分类是否合格也可以通过指示灯给予用户反馈,更加方便了用户的使用。
18.本发明的有益效果为:
19.1用户将垃圾桶放入投放口后,箱体内的垃圾桶搬运机构会自动将垃圾桶搬运至接料台处,并将厨余垃圾倒入接料台;接料台上方的图像采集器对接料台上的厨余垃圾进行图像采集,随后会将接料台上的厨余垃圾倒入回收桶中进行收集,避免资源浪费;此外,厨余垃圾倾倒完后,垃圾桶还会被送入清洗机构中进行清洗,防止厨余垃圾粘黏桶壁滋生病菌,保护用户的健康,给用户带来更好的使用体验。
20.2通过用户在触摸工控电脑上登录的身份信息,可以锁定垃圾桶的投放人,进而将
投放的垃圾信息与投放人进行匹配,便于进行垃圾分类处理的追踪,并将垃圾分类是否合格的信息反馈给用户,加强用户的垃圾分类意识。
21.3用户使用专用的垃圾桶收集厨余垃圾,减少了塑料袋的使用,进一步加强了用户垃圾分类的意识,同时在后续处理厨余垃圾的过程中,节约了大量的人力物力。
附图说明
22.图1为该厨余垃圾处理箱正面图。
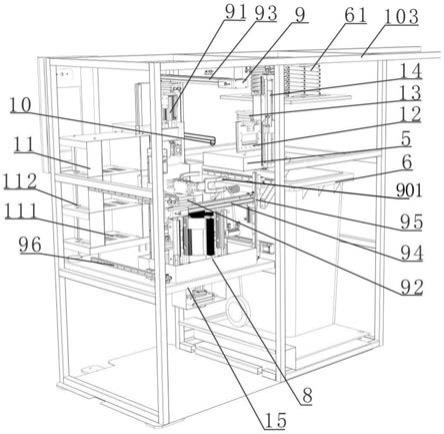
23.图2为该厨余垃圾处理箱箱体内结构图。
24.图3为该厨余垃圾处理箱内部结构侧视图。
25.图4为该厨余垃圾处理箱内部结构俯视图。
26.图5为翻转机构正视图。
27.图6为水平伸缩气缸局部放大图。
28.图7为第一滑槽局部放大图。
29.图8为清洗机构正视图。
30.图9为清洗机构俯视图。
31.图10为机械撑内部结构图。
32.图11为限位孔处局部视图。
33.其中,1、箱体;101、id读卡器;102、指示灯;103、支撑桁架;2、垃圾桶;3、触摸工控电脑;4、投放口;5、接料台;6、回收桶;61、伸缩盖板;7、翻转机构;71、支架;72、第一滑槽;73、第一滑块;74、竖直伸缩气缸;75、支撑台;76、水平伸缩气缸;77、第二滑槽;78、第二滑块;8、清洗机构;81、内壁毛刷;82、外壁毛刷;83、机械撑;831、外壳;832、中心轴;833、限位孔;84、连杆;85、第一伸缩机构;86、第二转动装置;87、第二伸缩机构;88、喷水嘴;89、挡水板;9、垃圾桶搬运机构;901、机械爪;91、第一机械臂;92、第二机械臂;93、第一导轨;94、第二导轨;95、升降架;96、第三导轨;10、图像采集器;11、垃圾桶暂存柜;111、暂存单元格;112、线管安装室;12、刮板;13、第一转动装置;14、升降台;15、安装板。
具体实施方式
34.本发明实施例通过提供一种厨余垃圾处理箱,解决了现有技术中的垃圾处理装置无法给予用户垃圾信息反馈,以及后续的垃圾处理中,需要人工将塑料袋去除的问题。
35.为了更好地理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
36.该厨余垃圾处理箱包括箱体1和垃圾桶2,箱体1侧面上设置有带无线通信模块的触摸工控电脑3和用于放置垃圾桶2的投放口4,箱体1内设置有接料台5,接料台5一侧放置有回收桶6,接料台5下方安装有翻转机构7,接料台5远离回收桶6一侧设置有清洗机构8,投放口4、接料台5和清洗机构8之间设置有垃圾桶搬运机构9,接料台5上方设置有与触摸工控电脑3电性连接的图像采集器10。
37.在本次实施例中,在触摸工控电脑3的下方安装有与触摸工控电脑3电性连接的id读卡器101和指示灯102,用户除了可以通过触摸工控电脑3扫码登录自己的身份信息外,还可以通过刷身份id卡的方式登录,当用户身份信息登录成功后,指示灯102会显示绿灯并打
开投放口4处的箱门,反之,指示灯102会显示红灯,并在触摸工控电脑3上显示身份信息登录失败。
38.当用户身份信息登录成功后,用户将垃圾桶2放入投放口4内。垃圾桶2底部安装有fird感应卡,投放口4底部安装有与触摸工控电脑3电性连接的射频读卡器和重力传感器,为方便用户放置垃圾桶2,在投放口4的底部设置有圆形标识,射频读卡器安装于圆形标识的中心。
39.垃圾桶搬运机构9包括设置于接料台5侧方的第一机械臂91和设置于清洗机构8上方的第二机械臂92,第一机械臂91通过第一导轨93安装于箱体1顶部,第二机械臂92通过第二导轨94安装于清洗机构8两侧的升降架95上,第一导轨93两端分别延伸至投放口4的上方和第二导轨94的上方,第一导轨93、第二导轨94和升降架95上均安装有与触摸工控电脑3电性连接的驱动装置。
40.在本次实施例中,第一机械臂91为三自由度机械臂,包括以机械爪对称线为轴线的转动自由度、以竖直线为轴线的转动自由度以及沿竖直方向的移动自由度;第二机械臂92为单自由度机械臂,包括以竖直线为轴线的转动自由度。在第一机械臂91和第二机械臂92均通过前端连接的机械爪901从垃圾桶2两侧抱式抓取,每个机械爪901包括两个相对的弧形爪,两个弧形爪连接于伸缩气缸的两个输出端上,通过伸缩气缸的伸缩来实现两个弧形爪的夹紧或松开。每个弧形爪的中间设置有u型镂空部,在第一机械臂91与第二机械臂92对垃圾桶2进行交接的过程中,u型镂空部的设置可以提供给另一机械爪抓取的空间,便于在垃圾桶2有限的桶身上实现两个机械爪901同时抓取,以保证交接垃圾桶2的可靠性。
41.当射频读卡器读取到垃圾桶2上的信息后,第一机械臂91会抓取垃圾桶2并将其带到接料台5处,旋转垃圾桶2将垃圾桶2中的厨余垃圾散开在接料台5上,由接料台5上方的图像采集器10对散开的厨余垃圾进行图像采集,垃圾桶2由第一机械臂91送至第二导轨94处,由第二机械臂92抓取垃圾桶2并送入清洗机构8中进行清洗。接料台5为顶面和靠近回收桶6的侧面均敞开的盒体,且侧面的开口作为厨余垃圾的倒料口。
42.箱体1内设置有方便用于安装的支撑桁架103,翻转机构7包括设置于接料台5两侧的支架71,支撑桁架103靠近回收桶1的侧面设置有支撑台75,支撑台75与支撑桁架103固定连接,支架71的下端与支撑台75侧面固定连接,支架71的上端与接料台5的侧面滑动铰接。滑动铰接的方式具体为在接料台5上固定有横向设置的第一滑槽72,第一滑槽72中滑动连接有第一滑块73,第一滑块73通过转轴与支架71转动连接。支架71相较于支撑桁架103倾斜一定角度,使得接料台5的倒料口能够更加接近回收桶6。接料台5上的滑动铰接处位于靠近回收桶6的一端,在远离回收桶6的一端通过竖直伸缩气缸74的伸长和缩短来推动接料台5翻转,从而将接料台3中的垃圾倒入回收桶2内,竖直伸缩气缸74安装于支撑台75上且输出端与接料台5底面连接。
43.此外,接料台5下方还设置有水平伸缩气缸76,水平伸缩气缸76上设置有第二滑槽77,第二滑槽77内设置有第二滑块78,水平伸缩气缸76输出端与第二滑块78的侧面固定连接,接料台5与第二滑块78的顶面固定连接,当伸缩水平伸缩气缸76输出端时,即可带动接料台移动。水平伸缩气缸76与竖直伸缩气缸74的输出端铰接。在竖直伸缩气缸74将接料台5向上顶起的过程中,可同时通过水平伸缩气缸76的伸缩来控制接料台5向回收桶6的方向移动,使得接料台5的倒料口更加接近回收桶6的中心,避免接料台5将厨余垃圾倒到回收桶6
外。
44.接料台5上方设置有与垃圾桶2内壁尺寸匹配的刮板12,刮板12上方安装有第一转动装置13,第一转动装置13通过升降台14安装于支撑桁架103上。为了保证刮板12能够刮落垃圾桶2内壁粘连的厨余垃圾,刮板12需要一定的强度,且需要保证刮板12在刮料时不会伤害厨余垃圾桶内壁,刮板12优选为一块硬质橡胶板,第一转动装置13选用msqb型旋转气缸,升降台14优选为scj125x100-50型伸缩气缸。
45.清洗机构8通过安装板15安装于支撑桁架103,清洗机构8包括内壁毛刷81、外壁毛刷82和机械撑83。内壁毛刷81通过连杆84安装于机械撑83上,机械撑83包括外壳831和位于外壳831内的中心轴832,外壳831与安装板15转动连接,外壳831上设置有限位孔833,内壁毛刷81通过连杆84穿过限位孔833与中心轴832连接,连杆84穿过限位孔833,中心轴832一端穿过安装板安装有第一伸缩机构85,第一伸缩机构85远离机械撑83一端安装于第二转动装置86上,在安装板15下方设置有固定架,第二转动装置86安装于固定架上。第二转动装置86选用msqb型旋转气缸,第一伸缩机构85和第二伸缩机构87均优选为mal25型伸缩气缸。
46.当需要清洗厨余垃圾桶外壁时,通过第一伸缩机构85控制中心轴832向上移动,连杆84受到限位孔833限制会相对于中心轴832转动,进而使得内壁毛刷81外伸抵紧垃圾桶2内壁,将垃圾桶2固定在机械撑83上,此时启动第二转动装置86控制机械撑83旋转,即可通过外壁毛刷82刷洗垃圾桶2外壁。底板15上安装有第二伸缩机构87,外壁毛刷82安装于第二伸缩机构87的输出端上,且机械撑83两侧均安装有第二伸缩机构87和外壁毛刷82,当需要清洗垃圾桶2内壁时,启动第二伸缩机构87控制两侧的外壁毛刷82从两侧压紧垃圾桶2,再启动第二转动装置86转动机械撑83使得内壁毛刷81刷洗垃圾桶2内壁。
47.内壁毛刷81和外壁毛刷82上均设置有用于固定垃圾桶2的凸顶,凸顶可以增大内壁毛刷81和外壁毛刷82与垃圾桶2之间的摩擦力,起到辅助固定的作用,减小了刷毛需要承受的作用力,增加了外壁毛刷82和内壁毛刷81的使用寿命。
48.安装板15上设置有出水口朝向清洗机构8的喷水嘴88,为了防止清洗机构8在清洗垃圾桶2时污水四溅,安装板15上设置有挡水板89,且挡水板89沿清洗机构2边缘合围设置;此外安装板15上设置有出水孔,出水孔位于挡水板89合围的范围内,当清洗机构8清洗垃圾桶2时,污水受到挡水板89的阻挡会积留在挡水板89的范围内,通过出水孔及时将挡水板89内的污水排出,防止挡水板89范围内的安装板15上有污水积留。
49.投放口4下方设置有垃圾桶暂存柜11,垃圾桶暂存柜11安装于安装板15上。清洗机构8两侧还设置有相平行的第三导轨96,升降架95安装于第三导轨96上,第三导轨96上安装有与触摸工控电脑3电性连接的驱动装置,第三导轨96远离清洗机构8的一端延伸至垃圾桶暂存柜11下方。当启动第三导轨96上的驱动装置后,可控制第二机械臂92将清洗完成的垃圾桶2带到垃圾桶暂存柜处11,并通过第二机械臂92将垃圾桶2存入垃圾桶暂存柜11中,再从垃圾桶暂存柜11中取出一个干净且无水渍的垃圾桶2交给第一机械臂91,由第一机械臂91将垃圾桶2放入投放口4返还给用户。
50.垃圾桶暂存柜11设置有多个暂存单元格111,暂存单元格111底部均设置为格栅板,方便晾干湿漉的垃圾桶2,使得积水可以直接从暂存单元格111下方排出。暂存单元格111侧壁上安装有紫外线杀菌灯,通过紫外线杀菌灯对垃圾桶2进行消毒杀菌,保护用户的身体健康,给用户带来更加安全的使用体验。暂存单元格111一侧设置有线管安装室112,通
过线管安装室112将箱体1内设备的电、气、水线管集中安装,使得箱体1内设备的结构更加紧凑,也避免了接线混乱,提高了装置的安全性。
51.回收桶6上方安装有伸缩盖板61,伸缩盖板61上安装有与触摸工控电脑3电性连接的驱动装置。当厨余垃圾倒入回收桶6中后,通过伸缩盖板61将回收桶6封盖,放止回收桶6内的臭味溢出污染环境。回收桶6底部和顶部分别安装有重力传感器和距离传感器。通过重力传感器和距离传感器实时把控回收桶6内厨余垃圾的重量信息和高度信息,避免回收桶6中的厨余垃圾过载,当达到装载阈值时,可及时通知工作人员进行更换回收桶6。
52.本发明的工作流程为:
53.用户通过扫描触摸工控电脑3显示屏上的二维码或刷卡的方式登录用户的身份信息,当用户身份信息登录成功后,指示灯102会显示绿灯并打开投放口4处的箱门,反之,指示灯102会显示红灯,并在触摸工控电脑3上显示身份信息登录失败。用户将垃圾桶2放入投放口4处,投放口4底部的射频读卡器读取垃圾桶2上fird感应卡的身份信息,将身份信息传送至触摸工控电脑3上,若放入物为设备专用的垃圾桶2,则指示灯102为绿灯并启动垃圾桶搬运机构9,反之指示灯102为红灯并在触摸工控电脑3上提示用户取走放入物;同时重力传感器对垃圾桶2进行称重,并通过触摸工控电脑3将重量信息传送至后台并存储进用户的身份信息中。
54.当确认为设备专用的垃圾桶2后,通过第一导轨93上的驱动机构控制第一机械臂91移动至投放口4处,并控制第一机械臂91抓取垃圾桶2。再通过第一导轨93上的驱动机构控制第一机械臂91移动至接料台5处,并控制第一机械臂91旋转垃圾桶2将厨余垃圾散开在接料台5上,第一次倾倒完成后,转动垃圾桶2使得垃圾桶2竖直且开口向上,通过升降台14控制刮板12向下伸进垃圾桶2中,启动第一转动装置13,通过刮板12挂落垃圾桶2内壁粘连的处于垃圾,再次控制第一机械臂91旋转垃圾桶2将垃圾桶2中的厨余垃圾倒入接料台5中。图像采集器10对散开的厨余垃圾进行图像采集,并将采集到的图像信息通过触摸工控电脑3传送至后台进行图像对比。
55.控制竖直伸缩气缸74和水平伸缩气缸76的输出端伸出,将接料台5上的处于垃圾倒入回收桶6中,启动伸缩盖板61将回收桶6封盖。再通过第一导轨93上的驱动机构控制第一机械臂91移动至第一导轨93与第二导轨94交接处,将垃圾桶2交给第二机械臂92。
56.通过第二导轨94上的驱动机构将第二机械臂92送至清洗机构8处,通过升降架95控制第二导轨94下降,并将垃圾桶2带入清洗机构8中,再通过升降架95控制第二机械手92上升远离清洗机构8。启动第一伸缩机构85控制中心轴832上升使得内壁毛刷81外伸,将垃圾桶2固定于机械撑83上,启动第二转动装置86旋转机械撑83,同时开启喷水嘴88向清洗机构8喷水,使得外壁毛刷82洗刷垃圾桶2的外壁,外壁清洗完成后,关闭喷水嘴88和第二转动装置86。启动第一伸缩机构85控制内壁毛刷81回缩,同时启动第二伸缩机构87控制外壁毛刷82压紧垃圾桶2,启动第二转动装置86旋转机械撑83并打开喷水嘴88,使得内壁毛刷81洗刷垃圾桶2内壁,内壁清洗完成后,关闭喷水嘴88和第二转动装置86。通过升降架95控制第二机械臂92下降并进入清洗机构8中,通过第二机械臂92抓取垃圾桶2,再次控制升降架95上升将清洗完成的厨余垃圾桶带出清洗机构8,完成全部清洗流程。清洗完成后,启动第三导轨96上的驱动机构控制第二机械臂92将垃圾桶2存入垃圾桶暂存柜11中。
57.当第二机械臂92将垃圾桶2放入清洗机构8中后,可立刻启动第三导轨96上的驱动
机构,控制第二机械臂92从垃圾桶暂存柜11中取出一个干净且无水渍的垃圾桶2,并返回交给第一机械臂91,由第一机械臂91抓取垃圾桶2并放入投放口4内,使得用户不必等待垃圾桶2的清洗时间,提高用户的使用体验。
58.本领域内的技术人员应明白,尽管已经描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性的概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围内的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求机器等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1