垃圾搬送用的移动体以及垃圾收集系统的制作方法
垃圾搬送用的移动体以及垃圾收集系统
1.相关申请的交叉引用
2.本技术要求在2020年12月17日提交的日本专利申请第2020-209667号的优先权,其包括说明书、权利要求、附图和摘要的全部内容通过引用并入本文。
技术领域
3.本公开涉及在预定区域中进行垃圾的搬送的垃圾搬送用的移动体的构造以及进行垃圾的收集的垃圾收集系统。
背景技术:
4.公开了根据向垃圾箱的垃圾的投入量的每小时增量的推移数据预测垃圾箱的垃圾积蓄量达到预定量的到达时间,高效地收集垃圾的垃圾收集系统(例如参照特开2017-30920号公报)。
技术实现要素:
5.在专利文献1记载的系统中,垃圾收集车前往放置垃圾箱的场所来进行垃圾的收集作业,所以需要垃圾收集作业空间,存在在垃圾的收集作业中破坏周边景观的可能性。
6.因此,本公开的目的在于提供不破坏景观而能够收集垃圾的垃圾搬送用的移动体以及垃圾收集系统。
7.本公开的垃圾搬送用的移动体的特征在于,具备:垃圾箱,收容垃圾;传感器,检测所述垃圾箱的垃圾的积蓄量;以及行驶装置,在由所述传感器检测到的垃圾积蓄量达到预定量时进行行驶。
8.由此,无需在放置垃圾搬送用的移动体的场所进行垃圾的取出作业,能够抑制破坏周边的景观。
9.在本公开的垃圾搬送用的移动体中,也可以具备显示由所述传感器检测到的垃圾积蓄量的显示装置,所述显示装置根据由所述传感器检测到的垃圾的积蓄量而使显示状态变化。
10.由此,移动体的周围的人能够容易地掌握垃圾搬送用的移动体的垃圾积蓄量,能够抑制向垃圾箱过剩地投入垃圾。
11.本公开的垃圾搬送移动体的特征在于,具备:垃圾箱,收容垃圾;通信装置,接收来自外部的信息;以及行驶装置,根据所述通信装置接收到的信息,进行行驶。
12.由此,能够根据来自外部的信息使收容垃圾的垃圾箱移动,能够高效地进行垃圾的收集。
13.本公开提供的垃圾收集系统,包括:服务器,具备储存有预定区域的地形信息的地形数据库;以及移动体,具备收容垃圾的垃圾箱和检测所述垃圾箱的垃圾的积蓄量的传感器,与所述服务器进行通信而在所述预定区域中行驶,该垃圾收集系统的特征在于,所述移动体将由所述传感器检测到的垃圾积蓄量信息发送给所述服务器,所述服务器根据从所述
移动体接收到的所述垃圾积蓄量信息,向所述移动体输出行驶指令。
14.这样,根据垃圾积蓄量信息,使具备收容垃圾的垃圾箱的移动体行驶,所以能够在垃圾箱漫出之前,例如使移动体朝向垃圾收集站等行驶,能够抑制破坏预定区域的景观。另外,具备收容垃圾的垃圾箱的移动体自行而进行垃圾的搬送,所以无需在预定区域中从垃圾箱进行垃圾的取出,能够抑制破坏景观。
15.在本公开的垃圾收集系统中,也可以包括配置于所述预定区域中,与所述服务器进行通信而将垃圾排出信息输出给所述服务器的设施,所述服务器根据从所述设施接收到的所述垃圾排出信息,向所述移动体输出行驶指令。
16.这样,根据来自在预定区域中美食街等设施的垃圾排出信息,使移动体行驶,所以在设施的垃圾排出量变多的情况下,能够使垃圾箱为空的移动体移动到设施,增强垃圾的收集能力。由此,能够有效地收集垃圾来抑制破坏景观。
17.在本公开的垃圾收集系统中,也可以所述服务器具备将时间段、季节或者天气和所述预定区域的过去的垃圾排出量关联起来储存的垃圾排出量数据库,根据所述垃圾排出量数据库,向所述移动体输出行驶指令。
18.由此,能够根据时间段、季节或者天气,调整预定区域中的移动体的配置、运行,能够高效地进行垃圾的收集。
19.在本公开的垃圾收集系统中,也可以所述行驶指令是向预定位置的移动指令,所述移动体根据从所述服务器接收到的所述预定区域的地形数据和所述预定位置的位置信息,自主行驶至所述预定位置。
20.移动体计算从当前位置至预定位置的移动路径而自主行驶,所以能够减小服务器的负荷。
21.在本公开的垃圾收集系统中,也可以所述行驶指令是向预定位置的移动路径,所述移动体依照从所述服务器接收到的所述移动路径,自主行驶至所述预定位置。
22.服务器计算移动路径并发送给移动体,在移动体中不进行移动路径的计算,所以能够使移动体成为简便的结构。
23.在本公开的垃圾收集系统中,也可以所述移动体具备显示由所述传感器检测到的垃圾积蓄量的显示装置,所述显示装置根据由所述传感器检测到的垃圾的积蓄量而使显示状态变化。
24.由此,移动体的周围的人能够容易地掌握移动体的垃圾积蓄量,能够抑制向垃圾箱过剩地投入垃圾。
25.本公开能够提供不破坏景观而能够收集垃圾的垃圾搬送用的移动体以及垃圾收集系统。
附图说明
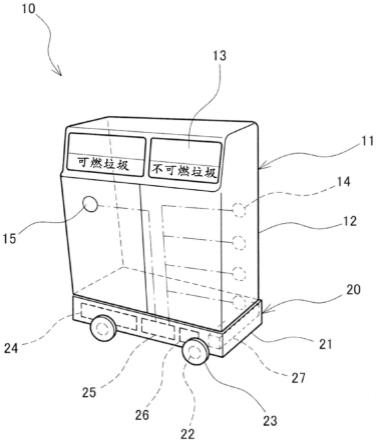
26.图1是示出实施方式中的垃圾搬送用的移动体的结构的立体图。
27.图2是示出实施方式的垃圾收集系统的结构的系统图。
28.图3是示出实施方式的垃圾收集系统的结构的功能框图。
29.图4是示出储存于垃圾排出量数据库的针对时间段的美食街的垃圾排出量的变化的图表。
30.图5是示出储存于垃圾排出量数据库的针对时间段的来自游乐设备的垃圾排出量的变化的图表。
31.图6是示出实施方式的垃圾收集系统的动作的说明图。
具体实施方式
32.以下,参照附图,说明实施方式的垃圾搬送用的移动体10。如图1所示,垃圾搬送用的移动体10具备收容垃圾的垃圾箱11、检测垃圾箱11的垃圾的积蓄量的传感器14、显示装置15、以及行驶装置20。
33.垃圾箱11设置有收容垃圾的本体12和投入垃圾的投入口13。垃圾箱11安装于行驶装置20上,与行驶装置20一起移动。另外,在垃圾箱11的本体12,安装有检测内部的垃圾的积蓄量的传感器14。传感器14是能够检测垃圾的容量或者重量的检测装置即可。在检测垃圾的容量的情况下,例如,也可以设为朝向内部照射红外线,根据有无其反射光,检测垃圾被积蓄至设置有传感器14的高度的装置。传感器14在高度方向上排列配置有多个。由此,构成为能够根据垃圾的收容高度检测垃圾积蓄量。在图1的例子中,最上面的传感器14安装于垃圾的积蓄量成为垃圾箱11的可收容容量的100%的高度,从上数第二个~第四个各传感器14分别安装于垃圾的积蓄量成为垃圾箱11的可收容容量的75%、50%、25%的高度。
34.另外,在本体12的正面,安装有根据垃圾箱11的垃圾的积蓄量而使显示状态变化的显示装置15。
35.行驶装置20是通过驱动用马达22驱动驱动轮23而自主行驶的电动行驶装置。行驶装置20包括外壳21、驱动用马达22、驱动轮23、电池24、行驶控制装置25、位置检测装置26以及通信装置27。电池24、行驶控制装置25、位置检测装置26以及通信装置27储存于外壳21中。
36.驱动用马达22是嵌入到驱动轮23中的轮毂马达。电池24对驱动用马达22供给驱动用电力。位置检测装置26根据gps单元,进行位置的检测,并且根据地形数据,计算从当前位置至目的地的移动路径,输出给行驶控制装置25。行驶控制装置25根据从位置检测装置26输入的位置信息和路径信息,调整驱动用马达22的转速、转矩和驱动轮23的方向,使行驶装置20自主行驶。行驶控制装置25由在内部包括进行信息处理的cpu等处理器和存储器的计算机构成。通信装置27与行驶控制装置25连接,在与外部之间进行信息的交换。此外,通信装置27既可以嵌入到行驶装置20中,也可以与行驶装置20独立地配置。
37.安装于垃圾箱11的各传感器14与行驶装置20的行驶控制装置25连接,传感器14检测到的垃圾箱11的垃圾积蓄量信息被输入到行驶控制装置25。另外,安装于垃圾箱11的显示装置15与行驶控制装置25连接,依照行驶控制装置25的指令而使显示状态变化。
38.说明如以上所述构成的移动体10的动作。移动体10在排出垃圾的就餐提供设施的附近等停止。在停止中,就餐提供设施的利用者将垃圾从垃圾箱11的投入口13投入到本体12的内部。传感器14继续本体12的内部的垃圾的积蓄量的检测。
39.传感器14如果垃圾被积蓄至安装于垃圾箱11的本体12的传感器14的高度,则将垃圾检测信号输出给行驶控制装置25。在如图1所示设置有多个传感器14的情况下,在垃圾被积蓄至各传感器14的高度时,从各传感器14向行驶控制装置25输出垃圾检测信号。行驶控制装置25如果从安装于垃圾箱11的最上面的传感器14被输入垃圾检测信号,则判断为垃圾
箱11的垃圾的积蓄量达到预定量,开始行驶。此时,预定量也可以适当地设定,例如,在设定为100%的情况下,在从图1所示的最上面的传感器14被输入垃圾检测信号时,开始行驶。另外,在设定为75%的情况下,在从如图1所示的从上数第二个传感器14被输入垃圾检测信号时,开始行驶。
40.此时,垃圾搬送用的移动体10例如也可以朝向垃圾收集站50移动,在垃圾收集站50排出垃圾箱11的垃圾(参照图6)。在此,垃圾收集站50是将垃圾搬送用的移动体10的垃圾临时集聚,在预定的日程搭载到垃圾收集车51的设备。
41.另外,行驶控制装置25如果从最下面的传感器14被输入垃圾检测信号,则使显示装置15例如点亮为绿色。然后,每当从上面的传感器14被输入垃圾检测信号时,使显示装置15的点亮颜色例如如黄色、橙色、红色那样变化。
42.如以上说明,移动体10如果垃圾箱11的垃圾积蓄量达到预定量,则从放置移动体10的场所移动,所以无需在放置移动体10的场所进行垃圾的取出作业,能够抑制破坏景观。另外,显示装置15的显示颜色根据垃圾积蓄量而变化,所以移动体10的周围的人能够容易地掌握移动体10的垃圾积蓄量,能够抑制向垃圾箱11过剩地投入垃圾。
43.接下来,说明移动体10的其他动作。移动体10也可以在从移动体10的外部例如就餐提供设施被输入垃圾的排出量增大等信息的情况下,朝向该就餐提供设施开始行驶。由此,能够向垃圾的排出量增大的场所输送垃圾箱11为空的移动体10,高效地进行垃圾的收集。
44.接下来,参照图2至图6,说明使用垃圾搬送用的移动体110的垃圾收集系统100。如图2所示,垃圾收集系统100包括服务器30、移动体110以及设施40。移动体110经由通信线路35与服务器30进行通信,通过来自服务器30的行驶指令在预定区域中行驶。
45.图3是将移动体110的结构表示为功能块的图。如图3所示,移动体110具备行驶控制装置125、位置检测装置26、通信装置127、传感器14、显示装置15、电池24、驱动用马达22以及驱动轮23。位置检测装置26、多个传感器14、显示装置15、电池24、驱动用马达22、以及驱动轮23与在前面参照图1说明的移动体10的结构相同,所以附加同一符号省略说明。
46.通信装置127经由通信线路35与服务器30进行数据的交换。
47.行驶控制装置125根据从位置检测装置26输入的位置信息和路径信息,调整驱动用马达22的转速、转矩和驱动轮23的方向,使移动体110朝向目的地自主行驶。
48.行驶控制装置125每当参照图1说明的多个传感器14输出垃圾检测信号时,根据输出垃圾检测信号的传感器14的位置,计算积蓄于垃圾箱11的垃圾的积蓄量,生成垃圾积蓄信息。例如,在从图1所示的最下面的传感器14被输入垃圾检测信号的情况下,行驶控制装置125判断为垃圾的积蓄量成为垃圾箱11的垃圾的可收容量的25%,生成25%的垃圾积蓄信息。同样地,行驶控制装置125在从下数第二个~最上面的传感器14被输入垃圾检测信号的情况下,分别生成50%、75%、100%的垃圾积蓄信息。行驶控制装置125将生成的垃圾积蓄信息输出给通信装置127。通信装置127将经由通信线路35从行驶控制装置125输入的垃圾积蓄信息发送给服务器30。
49.设施40是设置于预定区域中而排出垃圾的设备、建筑物等,经由通信线路35与服务器30进行数据的交换。在此,预定区域没有特别限定,例如,既可以是町(行政区划)的一个划区,也可以是公园等,还可以是图6所示的主题公园80。主题公园80是以文化、国家、故
事、电影、时代等特定的主题为基础整体演出的观光设施。在主题公园80中,配置有美食街41、42、游乐设备43~46等设施40。
50.返回到图2,服务器30是在内部包括进行信息处理的cpu等处理器和存储器的计算机。对服务器30连接包括地形数据库32、建筑物数据库33、垃圾排出量数据库34的数据库部31。
51.地形数据库32储存有预定区域中的道路37、设施40等的配置、人行道或者移动体10可行驶的场所的地形信息的数据。
52.建筑物数据库33储存有预定区域的建筑物的楼层配置、电梯、自动扶梯等升降设备的配置、各楼层的日常用具、隔板等的配置等、该建筑物的内部数据。建筑物数据库33例如也可以是组合该建筑物的bim(building information modeling(建筑信息模型))的数据和扫描该建筑物内部的状态而得到的扫描数据的数据库。
53.垃圾排出量数据库34是将预定区域的各设施40中的时间段、季节或者天气和过去的垃圾排出量关联起来储存的数据库。图4、图5示出向图6所示的主题公园80应用垃圾收集系统100的情况下的储存于垃圾排出量数据库34的数据的例子。
54.图4是示出针对时间段的来自美食街41、42的垃圾排出量的变化的图表。实线a表示晴天的变化,虚线b表示雨天的垃圾排出量的变化。如实线a所示,来自美食街41、42的垃圾的排出量在中午前后的午餐的时间和傍晚的晚餐的时间变多,在上午中的早的时间段或者午餐与晚餐之间的时间段变少。另外,如虚线b所示,向主题公园80的到场者少的雨天相比于实线a所示的晴天,垃圾的排出量整体上变少。
55.图5是示出针对时间段的来自游乐设备43~46的垃圾的排出量的变化的图表。图5的实线c表示晴天,单点划线d表示雨天。如图5的实线c所示,在游乐设备43~46中,在举办活动的时间段,垃圾的排出量变少,在入场者吃零食或者喝饮料的活动与活动之间的时间段,垃圾的排出量变多。另外,与美食街41、42同样地,如单点划线d所示,在雨天,垃圾的排出量变少。
56.接下来,参照图6,说明如以上所述构成的垃圾收集系统100的动作。在以下的说明中,说明将垃圾收集系统100应用于主题公园80的情况。如先前说明,在主题公园80中,设置有作为设施40的美食街41、42、游乐设备43~46。另外,多个移动体110在主题公园80中行驶。在分别区分多个移动体110的情况下,说明为移动体m1~移动体m5,在不区分的情况下,说明为移动体110。移动体m1~m5分别经由通信线路35与服务器30进行通信,在设置于主题公园80的道路37上行驶。此外,移动体m1~m5如果可行驶,则也可以在广场38上、草坪上行驶。在主题公园80中,设置有垃圾箱11为空的移动体10停车的配车站49。
57.另外,在主题公园80的边缘处,设置有垃圾收集站50。垃圾收集站50是收容移动体m1~m5收集的垃圾,直至垃圾收集车51从主题公园80的外部到来为止临时地集聚垃圾的设备。
58.早上,在主题公园80开场前,移动体m1配置于美食街41的旁边,移动体m2配置于其他美食街42的旁边,移动体m3配置于游乐设备46的旁边。另外,移动体m4、m5配置于配车站49。在主题公园80开场之前,各移动体m1~m5的垃圾箱11全部为空。
59.在主题公园80开场后,到场者进入到主题公园80中,如参照图4、图5说明,向配置于美食街41、42、游乐设备46的周边的移动体m1~m3的垃圾箱11投入垃圾。然后,在各移动
体m1~m3中,每当在垃圾箱11中在高度方向上排列安装的多个传感器14输出垃圾检测信号时,行驶控制装置125生成垃圾积蓄信息。
60.在从主题公园80的开场起经过时间时,如图4所示来自美食街41的垃圾排出量变多。移动体m1的行驶控制装置125最初输出25%的垃圾积蓄信息,接下来输出50%的垃圾积蓄信息,接下来输出75%的垃圾积蓄信息。此时,行驶控制装置125与先前说明的移动体10同样地,使显示装置15的点亮颜色例如如绿色、黄色、橙色那样变化。
61.通信装置127经由通信线路35将行驶控制装置125生成的垃圾积蓄信息输出给服务器30。服务器30从配置于美食街41的旁边的移动体m1,最初接收25%的垃圾积蓄信息,接下来接收50%的垃圾积蓄信息,接下来接收75%的垃圾积蓄信息。
62.服务器30在从移动体m1接收到75%的垃圾积蓄信息时,判断为移动体m1的垃圾箱11很快会达到可收容量的100%,向配置于配车站49的移动体m5发送移动到美食街41的旁边的移动指令。此时,移动体m5的垃圾箱11为空。在移动指令中,包括作为预定位置的目的地的位置信息。
63.移动体m5的通信装置27如果接收到从服务器30接收到的主题公园80的地形数据和作为目的地的美食街41的位置信息,则输出到位置检测装置26。位置检测装置26根据从通信装置27输入的接收到的主题公园80的地形数据和美食街41的位置信息,计算从当前地的配车站49至美食街41的移动路径,输出给行驶控制装置25。行驶控制装置25根据从位置检测装置26输入的路径信息,控制驱动用马达22,使移动体m5如图6所示的箭头91朝向美食街41自主行驶。此时,移动体m5既可以在道路37上行驶,也可以在道路以外的草坪等可行驶的区域中行驶。
64.移动体m5如果抵达美食街41,则向服务器30输出到达信号。服务器30如果从移动体m5接收到到达信号,则向移动体m1输出朝向垃圾收集站50移动的移动指令。在该移动指令中,包括作为目的地的垃圾收集站50的位置信息。移动体m1与移动体m5同样地,根据从服务器30接收到的地形数据和垃圾收集站50的位置信息,计算直至垃圾收集站50的移动路径,如在图6中所示的箭头92,朝向垃圾收集站50自主行驶。
65.移动体m1在垃圾收集站50中排出垃圾箱11中的垃圾。之后,移动体m1既可以根据来自服务器30的移动指令,例如自主行驶至配车站49并停止,也可以移动到游乐设备44的附近。此外,移动体m1在垃圾收集站50排出的垃圾在预定的时间被垃圾收集车51回收而被搬送到垃圾处理设施(未图示)。
66.如以上说明,垃圾收集系统100根据服务器30从移动体110接收到的垃圾积蓄量信息,使具备收容垃圾的垃圾箱11的移动体110行驶,所以能够在垃圾箱11漫出之前,使移动体110朝向垃圾收集站50行驶,能够抑制破坏主题公园80的景观。另外,具备收容垃圾的垃圾箱11的移动体110自行而进行垃圾的搬送,所以无需在主题公园80中从垃圾箱11进行垃圾的取出,能够抑制破坏景观。
67.接下来,说明垃圾收集系统100的其他动作。图6所示的美食街42根据销售的饮食物的量,将来自美食街42的垃圾的排出量作为垃圾排出信息,输出给服务器30。另外,游乐设备46根据游乐设备46的入场者数,将来自游乐设备46的垃圾排出量作为垃圾排出信息,发送给服务器30。服务器30比较从美食街42输入的垃圾排出信息和储存于垃圾排出量数据库34的针对时间段的来自美食街42的垃圾排出量的数据(参照图4),在美食街42的垃圾排
出量多于过去的实绩数据的情况下,如果从配置于美食街42的旁边的移动体m2接收到的垃圾积蓄信息成为比在前面的例子中说明的75%少的50%,则使在配车站49待机的移动体m4如图6所示的箭头93,移动到美食街42。另外,在从游乐设备46输入的垃圾排出信息多于图5所示的过去的来自游乐设备46的垃圾排出量的情况下,使移动体m4移动至游乐设备46的旁边。
68.这样,服务器30根据从美食街42等设施40接收到的垃圾排出信息和垃圾排出量数据库34,使移动体110行驶,所以即使在垃圾的排出量比通常多的情况下,也能够抑制在垃圾箱11中不能收容完垃圾,能够抑制破坏主题公园80的景观。
69.另外,服务器30能够根据时间段、季节或者天气,调整主题公园80中的移动体110的配置、运行。由此,能够高效地进行垃圾的收集。
70.在图6所示的美食街42的附近举办大型的活动,且存在通常的几倍量的饮食物的销售的情况下,美食街42将在1~2小时以内排出大量的垃圾这样的垃圾排出量信息发送给服务器30。服务器30在从美食街42接收到这样的垃圾排出信息的情况下,判断为仅用配置于美食街42的旁边的移动体m2不能收集完垃圾,将使在配车站49待机的移动体m4移动到美食街42的旁边的移动指令发送给移动体m4。移动体m4如果接收到该移动指令,则朝向美食街42开始自主行驶,在美食街42的旁边停车。由此,能够抑制垃圾箱11的容量不足而无法收集垃圾。
71.这样,服务器30根据从美食街42等设施40接收到的垃圾排出信息,使移动体110行驶,所以即使在垃圾的排出量急速变多的情况下,也能够抑制在移动体110的垃圾箱11中不能收容完垃圾,能够抑制破坏主题公园80的景观。另外,能够使垃圾箱11为空的移动体110移动到美食街42等设施40,增强垃圾的收集能力。由此,能够有效地收集垃圾来抑制破坏景观。
72.在以上说明的、垃圾收集系统100中,说明为服务器30将包括目的地的位置信息的移动指令和主题公园80的地形数据作为行驶指令发送给移动体110,移动体110计算移动路径并自主行驶至目的地,但不限于此。例如,也可以服务器30计算从移动体110的当前位置至目的地的移动路径,将计算出的移动路径发送给移动体110而使移动体110自主行驶。由此,能够使移动体110成为简便的结构。
73.在以上的说明中,说明为移动体m1~m5在建筑物的室外行驶,但也可以与服务器30进行通信,参照储存于服务器30的建筑物数据库33的建筑物的数据,在美食街41、42、游乐设备43~46的建筑物的内部行驶。
74.另外,在以上的说明中,说明为服务器30的数据库部31包括地形数据库32、建筑物数据库33、垃圾排出量数据库34,但不限于此。例如,也可以仅具备地形数据库32,服务器30根据从移动体110接收到的垃圾积蓄量信息,使移动体110行驶。另外,也可以数据库部31仅具备地形数据库32和垃圾排出量数据库34这2个数据库,服务器30根据从美食街42等设施40接收到的垃圾排出信息和垃圾排出量数据库34使移动体110行驶。
75.另外,在将实施方式的垃圾收集系统100应用于主题公园80的情况下,既可以使移动体10、110的外形成为在主题公园80的游乐中登场的角色的形状,也可以使显示装置15成为角色的眼睛的形状等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1