抓斗卸船机-运煤船自动定位系统的制作方法
抓斗卸船机
‑
运煤船自动定位系统
技术领域
1.本实用新型涉及智慧码头技术领域,具体涉及一种抓斗卸船机
‑
运煤船自动定位系统。
背景技术:
2.随着智慧码头的建设,抓斗卸船机的自动化、无人化控制是提高抓斗卸船机工作效益,减轻司机劳动强度的必由之路,势在必行。抓斗卸船机工作时,是依据运煤船停靠的泊位及船舱口位置判断卸船机大、小车抓煤工位,然后依据船缘的高低确定抓斗运行轨迹,从而实现远程遥控、自动/手动卸煤。 但是运煤船舶一般都比较大,船舶靠岸后等一船煤抓完往往要停靠48小时甚至72小时,船舶会经历涨潮及落潮的过程,这样随着潮涨及潮落船缘的高低会随之变化;卸船机的自动化系统无法自动判断船缘的高低及抓斗运行轨迹,严重制约着卸船机自动化、无人化控制系统的发展。
技术实现要素:
3.为解决上述技术问题,本实用新型提供一种抓斗卸船机
‑
运煤船自动定位系统,实现卸船机自动化、无人化控制,提高工作效率,降低司机劳动强度。
4.本实用新型采取的技术方案为:
5.抓斗卸船机
‑
运煤船自动定位系统,包括:
6.云服务平台、卸船机监控终端、船头智能化定位装置、船尾智能化定位装置;
7.所述船头智能化定位装置、船尾智能化定位装置均连接卸船机监控终端,卸船机监控终端连接定位固定基站;
8.所述船头智能化定位装置、船尾智能化定位装置通过5g通讯模块连接云服务平台;云服务平台通过交换机h1
‑
08分别连接客户端t5820、中控台cx
‑
lhjbb03。
9.所述交换机h1
‑
08连接流媒体服务器dv5car
‑
51,流媒体服务器dv5car
‑
51连接拼接屏cb55035。
10.所述定位固定基站包括卫星定位固定基站m300、gps接收天线at300、数传电台1sz02;卫星定位固定基站m300分别连接gps接收天线at300、数传电台1sz02。
11.所述船头智能化定位装置、船尾智能化定位装置,每一个定位装置均包括:gps天线bt5630、gps模块cx
‑
e708,单片机stm32f101c8t6、显示屏、键盘、存储器、数传电台2sz02、数传电台3sz02;
12.单片机stm32f101c8t6分别连接gps模块cx
‑
e708、数传电台2sz02、数传电台3sz02,
13.gps模块cx
‑
e708连接gps天线bt5630;
14.单片机stm32f101c8t6分别连接显示屏、键盘、存储器。
15.所述卸船机监控终端包括5g通讯模块cpepro、plc控制器s7
‑
1500、触摸屏tcp7062ti、数传电台4sz02、小车运行变频器atv930、抓斗支持变频器atv930、抓斗开闭变
频器atv930;
16.plc控制器s7
‑
1500分别与5g通讯模块cpepro、触摸屏tcp7062ti、数传电台4sz02、小车运行变频器atv930、抓斗支持变频器atv930、抓斗开闭变频器atv930连接。数传电台4sz02与数传电台3sz02通讯连接。
17.船头、船尾智能化定位装置中,将单片机stm32f101c8t6、gps模块cx
‑
e708、数传电台2sz02、数传电台3sz02、存储器、显示器、键盘都安装在固定支架上,固定支架固定安装在加强型铝合金手提箱上盖部分内侧;数传电台2sz02、数传电台3sz02的棒状天线固定在上盖外缘;
18.gps天线bt5630固定在加强型铝合金手提箱的上盖中央,开关电源lrs
‑
150
‑
12固定在加强型铝合金手提箱底部部分,底部旁边用于放置电源线、说明书。
19.本实用新型一种抓斗卸船机
‑
运煤船自动定位系统,技术效果如下:
20.可以将运煤船的准确位置及船缘高度实时送给卸船机自动化系统,使卸船机智能控制终端能够自动判断船缘高低,自动调整抓斗运行轨迹,从而实现卸船机自动化、无人化控制,提高工作效率,降低司机劳动强度。
附图说明
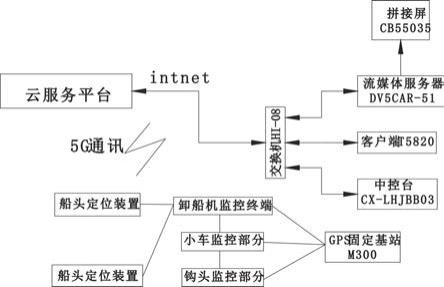
21.图1为本实用新型定位系统的原理示意图。
22.图2为本实用新型定位系统的定位固定基站原理示意图。
23.图3为本实用新型定位系统的船头、船尾智能化定位装置原理示意图。
24.图4为本实用新型定位系统的卸船机监控终端原理示意图。
25.图5为本实用新型定位系统的船头、船尾智能化定位装置的剖面结构示意图;
26.其中:a
‑
固定支架,b
‑
铝合金手提箱,c
‑
单片机\gps模块\数传电台固定空间;
27.d
‑
开关电源\电源线\工具固定空间;l
‑
中轴线,m
‑
船甲板。
28.图6为图5的俯视结构示意图。
具体实施方式
29.如图1所示,抓斗卸船机
‑
运煤船自动定位系统,包括云服务平台、卸船机监控终端、船头智能化定位装置、船尾智能化定位装置。所述船头智能化定位装置、船尾智能化定位装置均连接卸船机监控终端,卸船机监控终端连接定位固定基站。所述船头智能化定位装置、船尾智能化定位装置通过5g通讯模块连接云服务平台;云服务平台通过交换机h1
‑
08分别连接客户端t5820、中控台cx
‑
lhjbb03。卸船机监控终端连接小车监控部分、小车监控部分连接钩头监控部分。所述小车监控部分、钩头监控部分均与定位固定基站通讯连接。工作时,船头、船尾智能化定位装置将采集到的船头及船尾定位信息、船缘海拔高度信息等,通过数传电台传送卸船机监控终端,再通过5g通讯模块将船头及船尾定位信息、海拔高度信息等转发到云服务平台、供中控台cx
‑
lhjbb03的操作人员通过客户端t5820进行远程遥控及判断使用。
30.如图2所示,定位固定基站包括卫星定位固定基站m300、gps接收天线at300、数传电台1sz02;卫星定位固定基站m300分别连接gps接收天线at300、数传电台1sz02。gps接收天线at300负责接收卫星定位信号,并将卫星定位信号送给卫星定位固定基站m300,卫星定
位固定基站m300是负责差分计算处理,为船头、船尾智能化定位装置提供差分校准信号,以便船头、船尾智能化定位装置定位精度。数传电台1sz02负责将卫星定位固定基站m300差分信号传送给船头、船尾智能化定位装置的数传电台2sz02。
31.如图3所示,船头、船尾智能化定位装置包括gps定位天线bt5630、gps模块cx
‑
e708、数传电台2sz02+天线、单片机stm32f101c8t6、显示器、键盘、存储器,数传电台3sz02+天线、开关电源lrs
‑
150
‑
12。工作时, gps定位天线bt5630将接收到的船头或者船尾卫星定位信号及船缘海拔高度信号,传送给gps模块cx
‑
e708, gps模块cx
‑
e708经过差分计算后将当前船头或者船尾位置坐标、船缘海拔高度值,经过数传电台3sz02无线送给卸船机监控终端的数传电台4sz02,数传电台4sz02将数传电台3sz02送来的船头或者船尾卫星定位信号及船缘海拔高度信号送给plc控制器s7
‑
1500,再由plc控制器s7
‑
1500送给触摸屏tcp7062ti,然后由触摸屏tcp7062ti根据当前船头位置坐标、船缘海拔高度值,计算出抓斗的运行曲线,然后根据曲线自动调整小车运行变频器atv930的输出频率(行走速度)及抓斗支持变频器atv930、抓斗开闭变频器atv930的打开和闭合时间,从而达到远程遥控、自动抓煤、无人化控制之目的。
32.如图5、图6所示,船头、船尾智能化定位装置中,将单片机stm32f101c8t6、gps电路接收板cx
‑
e708、数传电台sz02、存储器、显示器、键盘都安装在固定支架a上,固定支架a又固定在加强型铝合金手提箱b的上盖部分内侧;2台数传电台棒状天线固定在上盖外缘,gps接收天线bt5630固定在加强型铝合金手提箱b的上盖中央,开关电源lrs
‑
150
‑
12固定在加强型铝合金手提箱b的底部部分,底部旁边用于放置电源线、说明书、工具等。
33.如图4所示,卸船机监控终端包括5g通讯模块cpepro、plc控制器s7
‑
1500、触摸屏tcp7062ti、数传电台4sz02、小车运行变频器atv930、抓斗支持变频器atv930、抓斗开闭变频器atv930等。5g通讯模块cpepro主要负责将plc控制器s7
‑
1500送来的信息送往云服务平台gis监控管理系统,数传电台4sz02主要负责接收来自数传电台3sz02送来的船头、船尾坐标及海拔高度信息;plc控制器s7
‑
1500主要负责处理来自船头、船尾智能化定位装置数传电台3sz02送来的船头、船尾坐标及船缘海拔高度信息及控制。
34.使用时,将制作好的不锈钢支架分别焊接在运煤船前后甲板中心轴线中央,工作时将船头、船尾直接将装有定位装置的铝合金手提箱b各自放在不锈钢支架上,然后将电源线插头与船舶上ac220v照明电源插座对接即可开机工作。运煤船船舱内的煤被抓斗卸船机卸完后,工作人员拔掉电源,将电源线放在铝合金手提箱b内,关闭箱盖闭锁后就可以提走准备放在下一条船的船头或者船尾上,执行新的定位检测任务。
35.当船舶靠岸以后,现场工作人员将装有智能化定位装置的铝合金手提箱b分别放在船舶前后甲板上的不锈钢支架上,gps卫星定位天线bt5630朝上,不锈钢支架分别焊接在运煤船前后甲板中心轴线中央;接通照明电源ac220v开机工作。
36.工作时,gps模块cx
‑
e708通过gps卫星定位天线bt5630不断接受卫星定位信号,同时通过数传电台2sz02不断接收来自gps固定基站m300的数传电台1sz02送来的差分信号,以便提高定位精度。gps模块cx
‑
e708将经过差分校准的船舶中心轴线的坐标信息、海拔高度信息送给单片机stm32f101c8t6,单片机stm32f101c8t6再通过数传电台3sz02将信息送给数传电台4sz02,由plc控制器s7
‑
1500将信息送给触摸屏tcp7062ti,由触摸屏tcp7062ti进行分析处理。当触摸屏tcp7062ti发现船舶中心轴线当前的坐标信息与原来设定抓斗运
行轨迹的坐标值发生了偏移、海拔高度值也与原来设定的抓斗运行轨迹的海拔高度值有所变化,触摸屏tcp7062ti就必须依据最新坐标值及最新海拔高度切换抓斗运行轨迹,从而保证抓斗在空中运行的安全性。当新的抓斗运行轨迹确定下来以后,触摸屏tcp7062ti会根据曲线命令plc控制器s7
‑
1500去自动调整小车运行变频器atv930的输出频率(行走速度)及抓斗支持变频器atv930、抓斗开闭变频器atv930的打开和闭合时间,从而准确完成抓煤、卸煤任务。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1