平仓机远程遥控操控系统的制作方法
1.本实用新型涉及平仓机,尤其涉及一种平仓机远程操控系统。
背景技术:
2.平仓机主要从事船舱或货场堆高玉米、沙土等的设备。传统平仓机操控系统为人工驾驶操作,因玉米或沙土粉尘大,作业环境恶劣,不利作业人员身心健康,对于空间狭小的二层船舱,容易造成作业人员碰头、挤压伤害,危险系数极高。
技术实现要素:
3.本实用新型是为了解决上述技术问题,提供一种平仓机远程遥控操控系统,其可远程遥控平仓机作业,作业人员远离作业现场,利于作业人员身心健康,降低作业人员危险系数。
4.本实用新型的技术解决方案是:
5.平仓机远程遥控操控系统,包括平仓机、安装在平仓机上的方向控制杆、举升控制杆、油门拉线和刹车踏板,其特殊之处在于:在平仓机上位于方向控制杆右侧和后方安装第一电机和第二电机,在第一电机的输出轴上安装与方向控制杆插接的第一拨叉,在第二电机的输出轴上安装与方向控制杆插接的第二拨叉;在平仓机上位于举升控制杆右侧和后方安装第三电机和第四电机,在第三电机的输出轴上安装与举升控制杆插接的第三拨叉,在第四电机的输出轴上安装与方向控制杆插接的第四拨叉;在平仓机上位于油门拉线前方安装第五电机,在第五电机输出轴上安装第一绕线轮,所述油门拉线缠绕在第一绕线轮上;在平仓机上位于刹车踏板下方安装第六电机,在第六电机的输出轴端安装第二绕线轮,在刹车踏板上连接刹车拉线,所述刹车拉线缠绕在第二绕线轮上;在平仓机上安装信号接收器,第一电机、第二电机、第三电机、第四电机、第五电机和第六电机与信号接收器的信号输出端通过导线连接,该平仓机远程遥控操控系统还设有与信号接收器信号输入端无线连接的信号发射器。
6.进一步优选,所述信号接收器型号为ak
‑
12s
‑
220v2.0。
7.进一步优选,所述信号发射器型号为f23
‑
a++(s)tx。
8.本实用新型的有益效果是:
9.通过信号发射器向信号接收器发送无线信号指令,信号接收器启动第一电机、第二电机、第三电机、第四电机、第五电机和第六电机,进而控制平仓机的前进、后退、左转或右转,控制料铲的提升、下降、上扬或下抑,控制平仓机的油门,控制平仓机的刹车,最终实现远程遥控操控平仓机,作业人员远离作业现场,利于作业人员身心健康,降低了作业人员危险系数。
附图说明
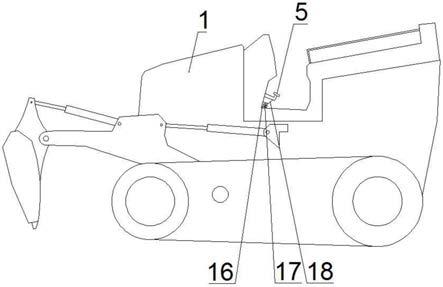
10.图1是本实用新型的结构示意图;
11.图2是图1的俯视图;
12.图3是本实用新型的电路方框图;
13.图中:1
‑
平仓机,2
‑
方向控制杆,3
‑
举升控制杆,4
‑
油门拉线,5
‑
刹车踏板, 6
‑
第一电机,7
‑
第二电机,8
‑
第一拨叉,9
‑
第二拨叉,10
‑
第三电机,11
‑
第四电机,12
‑
第三拨叉,13
‑
第四拨叉,14
‑
第五电机,15
‑
第一绕线轮,16
‑
第六电机, 17
‑
第二绕线轮,18
‑
刹车拉线,19
‑
信号接收器,20
‑
信号发射器。
具体实施方式
14.如他1
‑
图3所示,平仓机远程遥控操控系统,包括平仓机1、安装在平仓机 1上的方向控制杆2、举升控制杆3、油门拉线4和刹车踏板5,在平仓机1上位于方向控制杆2右侧和后方安装第一电机6和第二电机7,在第一电机6的输出轴上安装与方向控制杆2插接的第一拨叉8,在第二电机7的输出轴上安装与方向控制杆2插接的第二拨叉9;在平仓机1上位于举升控制杆3右侧和后方安装第三电机10和第四电机11,在第三电机10的输出轴上安装与举升控制杆3 插接的第三拨叉12,在第四电机11的输出轴上安装与方向控制杆2插接的第四拨叉13;在平仓机1上位于油门拉线4前方安装第五电机14,在第五电机14 输出轴上安装第一绕线轮15,所述油门拉线4缠绕在第一绕线轮15上;在平仓机1上位于刹车踏板5下方安装第六电机16,在第六电机16的输出轴端安装第二绕线轮17,在刹车踏板5上连接刹车拉线18,所述刹车拉线18缠绕在第二绕线轮17上;在平仓机1上安装信号接收器19,所述信号接收器19型号为 ak
‑
12s
‑
220v2.0,所述信号接收器19型号为第一电机6、第二电机7、第三电机10、第四电机11、第五电机14和第六电机16与信号接收器19的信号输出端通过导线连接,该平仓机1远程遥控操控系统还设有与信号接收器19信号输入端无线连接的信号发射器20,所述信号发射器20型号为f23
‑
a++(s)tx。
15.操作时,首先启动平仓机1,并通过吊车将平仓机1吊放在船舱内,然后通过信号发射器20向第一电机6和第二电机7发送信号,驱动方向控制杆2控制平仓机1的前进、后退、左转或右转,通过信号发射器20向第三电机10和第四电机11发送信号,驱动举升控制杆3控制料铲的提升、下降、上扬或下抑,通过信号发射器20向第五电机14发送信号,驱动油门拉线4控制平仓机1的油门,通过信号发射器20向第六电机16发送信号,驱动刹车踏板5控制平仓机1的刹车,通过远程遥控操控平仓机1,最终完成船舱内的玉米堆高作业。
16.以上仅为本实用新型的具体实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.平仓机远程遥控操控系统,包括平仓机、安装在平仓机上的方向控制杆、举升控制杆、油门拉线和刹车踏板,其特征在于:在平仓机上位于方向控制杆右侧和后方安装第一电机和第二电机,在第一电机的输出轴上安装与方向控制杆插接的第一拨叉,在第二电机的输出轴上安装与方向控制杆插接的第二拨叉;在平仓机上位于举升控制杆右侧和后方安装第三电机和第四电机,在第三电机的输出轴上安装与举升控制杆插接的第三拨叉,在第四电机的输出轴上安装与方向控制杆插接的第四拨叉;在平仓机上位于油门拉线前方安装第五电机,在第五电机输出轴上安装第一绕线轮,所述油门拉线缠绕在第一绕线轮上;在平仓机上位于刹车踏板下方安装第六电机,在第六电机的输出轴端安装第二绕线轮,在刹车踏板上连接刹车拉线,所述刹车拉线缠绕在第二绕线轮上;在平仓机上安装信号接收器,第一电机、第二电机、第三电机、第四电机、第五电机和第六电机与信号接收器的信号输出端通过导线连接,该平仓机远程遥控操控系统还设有与信号接收器信号输入端无线连接的信号发射器。2.根据权利要求1所述的平仓机远程遥控操控系统,其特征在于:所述信号接收器型号为ak
‑
12s
‑
220v2.0。3.根据权利要求1所述的平仓机远程遥控操控系统,其特征在于:所述信号发射器型号为f23
‑
a++(s)tx。
技术总结
平仓机远程遥控操控系统,包括平仓机,在平仓机上安装第一电机和第二电机,第一电机和第二电机的的输出轴上安装与方向控制杆插接的第一拨叉和第二拨叉;在平仓机上安装第三电机和第四电机,第三电机和第四电机的输出轴上安装与举升控制杆插接的第三拨叉和第四拨叉;在平仓机上安装第五电机,第五电机输出轴上安装与油门拉线连接的第一绕线轮;在平仓机上安装第六电机,第六电机的输出轴端通过刹车拉线安装与刹车踏板连接的第二绕线轮;在平仓机上安装信号接收器,该平仓机远程遥控操控系统还设有与信号接收器信号输入端无线连接的信号发射器。其可远程遥控平仓机作业,作业人员远离作业现场,利于作业人员身心健康,降低作业人员危险系数。人员危险系数。人员危险系数。
技术研发人员:郭洪亮 李东 罗宇 杜君臣
受保护的技术使用者:锦州港股份有限公司
技术研发日:2021.02.05
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1