全自动砖块堆垛打包机的制作方法
1.本实用新型涉及砖块堆垛打包技术领域,特别是涉及全自动砖块堆垛打包机。
背景技术:
2.砖厂在生产完砖块之后需要对砖块进行堆垛打包,由于通过人工操作工作量较大且效率较低,因此在批量化生产中一般需要使用机械设备辅助完成砖块的转移和堆垛。
3.目前,对砖块进行堆垛打包的设备通常只是辅助完成某一工序,其中的一些过程,如打包等过程还是通过人工来完成,其效率较低。
技术实现要素:
4.本实用新型的目的在于解决上述问题,提供一种全自动砖块堆垛打包机,用于实现砖块堆垛打包的全过程自动化,提升砖块堆垛和打包效率。
5.本实用新型的目的通过以下技术方案来实现:
6.全自动砖块堆垛打包机,包括第一传输模块,第一传输模块右端安装有第一升降机械手,所述第一升降机械手下方设有平移机构,所述第一升降机械手右端设有第二传输模块,所述第二传输模块的上方设有砖块转移模块,所述砖块转移模块的行程方向与第二传输模块的传输方向垂直,所述第二传输模块的右端设有第二升降机械手,所述第二升降机械手具有左右移动自由度,所述砖块转移模块的前方设有砖块暂存区,砖块暂存区的前方设有堆垛机械手,堆垛机械手的下方设有升降机构,所述升降机构上安装有堆垛托盘,升降机构的右端设有第三传输模块,第三传输模块上设有砖垛支撑架,所述砖垛支撑架可沿第三传输模块左右滑动,所述第三传输模块的右端设有打包模块。
7.上述的全自动砖块堆垛打包机,砖块生产完之后即可放入托板并载入到第一传输模块进入自动堆垛打包流程,第一升降机械手用于将放有砖块的托板转移至上方的第二传输模块,然后经第二传输模块传输至砖块转移模块下方时,由砖块转移模块将托板上的砖块转移至砖块暂存区,然后托板继续向右传输,第二传输模块右端的第二升降机械手将托板进行回收利用,砖块暂存区的砖块由堆垛机械手转移至堆垛托盘进行堆垛,堆垛完后的砖垛通过砖垛转移支撑架从第三传输模块传输至打包模块进行打包,从而完成对砖块的全自动传输、转移、堆垛和打包,实现了砖块堆垛打包的自动化,提高了生产效率。
8.进一步的,所述堆垛机械手具有前后移动和上下移动的自由度,所述堆垛托盘具有转动自由度,其作用在于:通过堆垛转盘的转动来实现堆垛过程中每层砖块的90
°
换向,降低堆垛机械手的结构复杂度和控制难度,使设备工作更加稳定。
9.进一步的,所述第一传输模块、第二传输模块、第三传输模块、第一升降机械手、第二升降机械手、升降机构的传动机构均采用链传动方式,其作用在于:满足砖块传输和转移过程中承重和远距离传动的需求,同时适应砖块生产的多尘环境。
10.进一步的,所述堆垛托盘上均匀安装有若干支撑板,所述砖垛支撑架上均匀安装有若干叉齿,所述支撑板和叉齿呈错位设置,当砖垛支撑架靠近堆垛托盘时,叉齿可插入支
撑板之间的间隙,其作用在于:降低砖垛转移过程的难度,提升砖垛转移效率。
11.进一步的,所述第三传输模块的右端设有待转移区,其作用在于:方便叉车转移打包好的砖垛。
12.结合以上技术方案,与现有技术相比,本实用新型所提供的全自动砖块堆垛打包机,其有益效果是:
13.本实用新型所提供的全自动砖块堆垛打包机,能够全自动地实现砖块的传输、转移、堆垛和打包过程,全面提升了砖块堆垛打包效率,减少了人工参与,提升了自动化程度,能够满足大批量高效率的生产需求。
附图说明
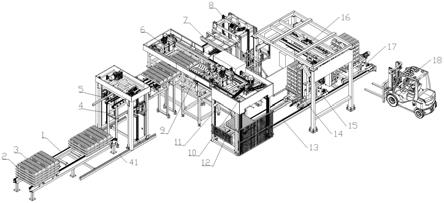
14.图1为本实用新型所述的全自动砖块堆垛打包机的结构示意图。
15.图2为本实用新型所述的第一传输模块的局部放大示意图。
16.图3为本实用新型所述的堆垛托盘和砖垛支撑架的结构示意图。
17.其中,1
‑
第一传输模块,2
‑
托板,3
‑
砖块,4
‑
第一升降机械手,41
‑
平移机构,5
‑
第二传输模块,6
‑
砖块转移模块,8
‑
第二升降机械手,9
‑
砖块暂存区,10
‑
堆垛机械手,11
‑
升降机构,12
‑
堆垛托盘,121
‑
支撑板,13
‑
第三传输模块,14
‑
砖垛支撑架,141
‑
叉齿,15
‑
砖垛,16
‑
打包模块,17
‑
待转移区,18
‑
叉车。
具体实施方式
18.为详细说明本实用新型的技术特征和所实现的目的和效果,以下结合附图做进一步的描述:
19.如图1~3所示,全自动砖块堆垛打包机,包括第一传输模块1,第一传输模块1右端安装有第一升降机械手4,所述第一升降机械手4下方设有平移机构41,所述第一升降机械手4右端设有第二传输模块5,所述第二传输模块5的上方设有砖块转移模块6,所述砖块转移模块6的行程方向与第二传输模块5的传输方向垂直,所述第二传输模块5的右端设有第二升降机械手8,所述第二升降机械手8具有左右移动自由度,所述砖块转移模块6的前方设有砖块暂存区9,砖块暂存区9的前方设有堆垛机械手10,堆垛机械手10的下方设有升降机构11,所述升降机构11上安装有堆垛托盘12,升降机构11的右端设有第三传输模块13,第三传输模块13上设有砖垛支撑架14,所述砖垛支撑架14可沿第三传输模块13左右滑动,所述第三传输模块13的右端设有打包模块16。
20.优选的,所述堆垛机械手10具有前后移动和上下移动的自由度,所述堆垛托盘12具有转动自由度。
21.优选的,所述第一传输模块1、第二传输模块5、第三传输模块13、第一升降机械手4、第二升降机械手8、升降机构11的传动机构均采用链传动方式。
22.优选的,所述堆垛托盘12上均匀安装有若干支撑板121,所述砖垛支撑架14上均匀安装有若干叉齿141,所述支撑板121和叉齿141呈错位设置,当砖垛支撑架14靠近堆垛托盘12时,叉齿141可插入支撑板121之间的间隙。
23.优选的,所述第三传输模块13的右端设有待转移区17。
24.上述实施例所提供的全自动砖块堆垛打包机,其具体实施过程如下:
25.砖块3生产完之后,整齐地放入托板2,然后载入第一传输模块1,由第一传输模块1传输至第一升降机械手4左方,第一升降机械手4通过平移机构41向左平移抓取托板2并将托板2及其上方的砖块3向上传输,到达第二传输模块5的高度后,第一升降机械手4向右平移后再下降一段距离将托板2放入第二传输模块5上,由第二传输模块5继续将托板传输至砖块转移模块6下方,然后由砖块转移模块6将砖块3转移至砖块暂存区9,托板2则继续向右传输,直至第二升降机械手8向左运动抓取托板2后向右运动再向下运动将托板2回收以便周转。
26.升降机构11将堆垛托盘12升至堆垛机械手10的堆垛区域,堆垛机械手10将砖块暂存区9的砖块堆垛至堆垛托盘上,每完成一层砖块的堆垛,堆垛托盘12旋转90
°
,同时升降机构11下降一层砖块的高度,在堆垛过程中,堆垛机械手10在砖垛15的第二层以上预留叉车孔。
27.完成堆垛后,升降机构11下降,使堆垛托盘12到达交接位置,砖垛支撑架14沿第三传输模块13向左运动至叉齿141完全插入支撑板121之间的间隙,然后升降机构11下降,使支撑板121脱离砖垛15底部,使砖垛15完全有砖垛支撑架14支撑,然后砖垛支撑架14沿第三传输模块13向右运动至打包模块16的打包工位,由打包模块16将砖垛进行缠绕打包,完成打包后,砖垛支撑架14将打包好的砖垛15传输至待转移区17,叉车18从待转移区17将打包好的砖垛15叉走。
28.本实用新型并不限于上述实施方式,对于本领域的普通技术人员来说,在不脱离本实用新型的构思的前提下,还可以做出各种变形、改进和替代,这些都属于本实用新型的保护范围,本实用新型的保护范围以所附权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1