具有自动称重功能的投料器翻料机构的制作方法
1.本实用新型涉及垃圾处理的技术领域,尤其涉及具有自动称重功能的投料器翻料机构。
背景技术:
2.地埋站在收容垃圾到一定程度后,需要转运车将地埋站内的垃圾压缩箱拉出,对垃圾进行整体处理。判断地埋站是否收容到足够量的垃圾的方法是对垃圾压缩箱内的垃圾体积以及重量进行加检测,二者有一超过预定值,即判定垃圾压缩箱收容到足够量的垃圾。由于垃圾压缩箱整体体积巨大,要对垃圾压缩箱进行称重,需要在基坑中安装地磅,成本高,而且影响地埋站升降平台的安装。
技术实现要素:
3.本实用新型的目的是为了解决背景技术中提及的问题,提供一种具有自动称重功能的投料器翻料机构,可以实现对垃圾的称重,无需在地埋站基坑中安装地磅,有效降低成本。
4.为实现上述技术目的,本实用新型采取的技术方案为:
5.具有自动称重功能的投料器翻料机构,包括投料器箱体,投料器箱体侧面安装有翻料机构,翻料机构包括翻料机构固定架、动力缸、主翻转臂、从翻转臂、连接臂、挂桶支臂以及挂钩,翻料机构固定架位于投料器箱体一侧,翻料机构固定架上端与投料器箱体上端齐平,动力缸的缸体铰接连接在翻料机构固定架上,动力轴向下伸出,主翻转臂上端与翻料机构固定架上端铰接配合,连接臂一端与动力缸的动力轴铰接连接,一端与从翻转臂的下端铰接,主翻转臂下端与连接臂的中部铰接,从翻转臂的上端与挂桶支臂的内端连接,挂桶支臂的外端与挂钩连接,挂钩能卡住垃圾桶侧面的凸轴,使垃圾桶定位在翻料机构上,从翻转臂的中部和主翻转臂的中部通过铰点转换臂铰接连接,其特征是:投料器箱体上安装有称重机构,称重机构包括后固定板、称重单元以及前固定板,后固定板位于投料器箱体内侧,与投料器箱体固定连接,前固定板位于投料器箱体外侧,与投料器箱体间隙配合,称重单元穿过投料器箱体,称重单元一端与后固定板固定连接,一端与前固定板固定连接,前固定板与翻料机构固定架固定连接,使得前固定板、翻料机构以及垃圾桶的重量均作用于称重单元上,称重单元与外界的数据存储单元信号连接,并能将称得的重量信息发送至数据存储单元。
6.为优化上述技术方案,采取的具体措施还包括:
7.上述的翻料机构固定架上安装有角度转动传感器,角度转动传感器正对着挂桶支臂,当动力缸带动主翻转臂、从翻转臂、连接臂和挂桶支臂一体运动时,角度转动传感器能感应到挂桶支臂的转动,角度转动传感器与称重单元信号连接,能控制称重单元运作。
8.上述的从翻转臂的下端安装有弹性垫,垃圾桶定位在翻料机构上时,弹性垫能正好抵在垃圾桶侧壁的下部,防止垃圾桶与翻料机构发生碰撞。
9.上述的弹性垫为纵截面为弧形的橡胶垫。
10.上述的主翻转臂、从翻转臂、连接臂和挂桶支臂为外表面涂覆有防腐蚀层的硬质钢材料制作。
11.上述的动力缸为液压缸。
12.上述的称重单元为压变式称重传感器。
13.本实用新型的具有自动称重功能的投料器翻料机构,将翻料机构直接安装在称重机构上,在预先得知翻料机构和垃圾桶空重的基础上,每次翻料机构向投料器箱体内投放垃圾时,称重机构对翻料机构以及盛满垃圾的垃圾桶进行称重,得到总重量,该总重量减去翻料机构和垃圾桶空重,即可获得每次翻料机构向投料器箱体内投放垃圾的重量,将所有投放次数的垃圾重量相加,即可获得投入投料器箱体内的垃圾总重量。工作人员在垃圾总重量超过预定值时,对地埋站进行操作,拉出位于投料器箱体下方的垃圾压缩箱,对垃圾进行集中处理。
14.本实用新型结构简单实用,不用在垃圾压缩箱下方安装地磅就可以称得垃圾压缩箱内垃圾重量,成本低廉。
附图说明
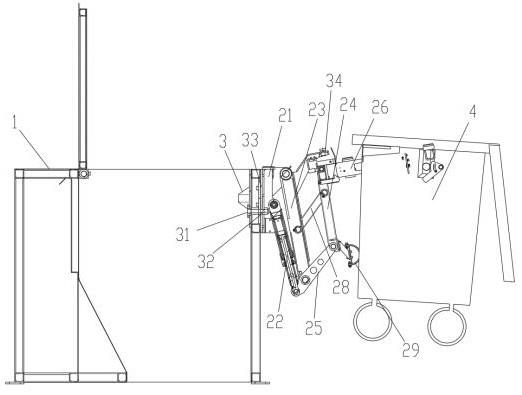
15.图1是本实用新型的结构示意图;
16.图2是图1的俯视图;
17.图3是图2的a
‑
a剖视图。
18.图中标记名称:投料器箱体1、翻料机构2、翻料机构固定架21、动力缸22、主翻转臂23、从翻转臂24、连接臂25、挂桶支臂26、挂钩27、铰点转换臂28、弹性垫29、称重机构3、后固定板31、称重单元32、前固定板33、角度转动传感器34、垃圾桶4。
具体实施方式
19.以下结合附图对本实用新型的实施例作进一步详细描述。
20.本实施例的具有自动称重功能的投料器翻料机构,包括投料器箱体1,投料器箱体1侧面安装有翻料机构2,翻料机构2包括翻料机构固定架21、动力缸22、主翻转臂23、从翻转臂24、连接臂25、挂桶支臂26以及挂钩27,翻料机构固定架21位于投料器箱体1一侧,翻料机构固定架21上端与投料器箱体1上端齐平,动力缸22的缸体铰接连接在翻料机构固定架21上,动力轴向下伸出,主翻转臂23上端与翻料机构固定架21上端铰接配合,连接臂25一端与动力缸22的动力轴铰接连接,一端与从翻转臂24的下端铰接,主翻转臂23下端与连接臂25的中部铰接,从翻转臂24的上端与挂桶支臂26的内端连接,挂桶支臂26的外端与挂钩26连接,挂钩26能卡住垃圾桶4侧面的凸轴,使垃圾桶定位在翻料机构2上,从翻转臂24的中部和主翻转臂23的中部通过铰点转换臂28铰接连接,其特征是:投料器箱体1上安装有称重机构3,称重机构3包括后固定板31、称重单元32以及前固定板33,后固定板31位于投料器箱体1内侧,与投料器箱体1固定连接,前固定板33位于投料器箱体1外侧,与投料器箱体1间隙配合,称重单元32穿过投料器箱体1,称重单元32一端与后固定板31固定连接,一端与前固定板33固定连接,前固定板33与翻料机构固定架21固定连接,使得前固定板33、翻料机构2以及垃圾桶4的重量均作用于称重单元32上,称重单元32与外界的数据存储单元信号连接,并
能将称得的重量信息发送至数据存储单元。
21.实施例中,翻料机构固定架21上安装有角度转动传感器34,角度转动传感器34正对着挂桶支臂26,当动力缸22带动主翻转臂23、从翻转臂24、连接臂25和挂桶支臂26一体运动时,角度转动传感器34能感应到挂桶支臂26的转动,角度转动传感器34与称重单元32信号连接,能控制称重单元32运作。
22.实施例中,从翻转臂24的下端安装有弹性垫29,垃圾桶4定位在翻料机构2上时,弹性垫29能正好抵在垃圾桶4侧壁的下部,防止垃圾桶4与翻料机构2发生碰撞。
23.实施例中,弹性垫29为纵截面为弧形的橡胶垫。
24.实施例中,主翻转臂23、从翻转臂24、连接臂25和挂桶支臂26为外表面涂覆有防腐蚀层的硬质钢材料制作。
25.实施例中,动力缸22为液压缸。
26.实施例中,称重单元32为压变式称重传感器。
27.本实用新型的使用方法如下:在通过翻料机构2翻转垃圾桶前,将称重单元32和角度转动传感器34均和外部的plc连接,在plc中设定好翻料机构2重量和垃圾桶空重,将垃圾桶4固定安装到挂钩27上,然后启动动力缸22运作,动力缸22的液压轴向下伸出,使连接臂25绕主翻转臂23下端为轴转动,从翻转臂24、挂桶支臂26和挂钩27上移,将垃圾桶4提升至半空,此时,角度转动传感器34感应到挂桶支臂26位置发生变化,发送信号至plc,plc控制动力缸22暂停运作0.5秒,称重单元32称重,得到的重量信息发送至plc,plc将该重量减去翻料机构2重量和垃圾桶空重,即得到垃圾桶4中的垃圾重量,然后动力缸22继续运作,当从翻转臂24转动到整体接近主翻转臂23时,铰点转换臂28夹在主翻转臂23和从翻转臂24之间卡死,导致从翻转臂24无法相对于主翻转臂23转动,主翻转臂23与从翻转臂24、连接臂25、挂桶支臂26形成固定连接的状态,动力缸22的液压轴持续伸出,使主翻转臂23以主翻转臂23上端为轴,绕翻料机构固定架21上端转动,实现了垃圾桶4的翻转动作,最终垃圾桶4翻转到投料器箱体1的上方,且开口朝下,将垃圾倾倒入投料器箱体1下方的垃圾压缩箱中。将垃圾桶卸下时,持续保持动力缸22回缩液压轴,待垃圾桶反转至与地面接触,将垃圾桶从挂钩27上取下即可。每投放一次垃圾,plc都能获得一次垃圾桶4中的垃圾重量信息,将这些重量相加,当重量超过预定值时,plc发出信息,工作人员更换垃圾压缩箱。
28.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1