一种垃圾智能识别分类存储装置
1.本实用新型涉及一种新型垃圾智能识别分类存储装置
背景技术:
2.近年来,随着我国经济的不断发展,人均生产的垃圾量不断增大,再加上我国的人口基数庞大,使得垃圾污染逐渐成为我国的一个严峻问题,而垃圾分类是解决垃圾污染的一个重要手段。因此,对于一个国家而言,垃圾分类显得尤为重要,但目前我国城市中大部分的分类垃圾桶仅仅是贴有标识,还需要人为辨别垃圾再进行投放,但我国的垃圾分类的教育和宣传还不足,这导致许多城市中垃圾分类率特别低。所以需要一种能播放垃圾分类宣传片且能智能识别垃圾并进行分类储存的装置。目前市面上的智能垃圾分类装置大都有着占地面积大、工作效率低且功能单一的缺点。由此,市场上越来越需要一款高效、便捷且更加智能化的垃圾分类装置。
技术实现要素:
3.为了克服现有技术存在的缺陷,本实用新型提供了一种高效、体积小的垃圾智能识别分类存储装置。
4.本实用新型解决其技术问题所采用的技术方案是:
5.一种垃圾智能识别分类存储装置,包括主支撑架、垃圾收集装置、垃圾识别装置、垃圾分类装置、满载检测装置和四个垃圾储存容器,所述四个垃圾储存容器分别为可回收垃圾储存容器、厨余垃圾储存容器、有害垃圾储存容器和其他垃圾储存容器;
6.所述垃圾收集装置包括滑道、垃圾暂存容器、用于下放垃圾的活动载物台和用于活动载物台旋转的旋转机构,所述滑道倾斜安装在主支撑架上,所述垃圾暂存容器的上端口位于滑道下端处,活动载物台设置在垃圾暂存容器的下端口处,并且与垃圾暂存容器形成用于盛装垃圾的空间,所述旋转机构包括次舵机和次舵机支撑架,所述次舵机通过次舵机支撑架安装在垃圾暂存容器的侧面上,同时所述次舵机通过舵盘与活动载物台偏心连接,通过偏心连接实现垃圾暂存容器下端口的开闭;
7.所述垃圾识别装置包括固定件和用于识别垃圾的摄像头,摄像头采用openmv摄像头,并且设置在初始状态下的垃圾暂存容器上端口上方,所述固定件安装在主支撑架上,所述openmv摄像头安装在固定件上;
8.所述垃圾分类装置包括主舵机支撑架、主舵机、光轴和光轴套件,所述光轴竖向设置在主支撑架的中部,并且其下端通过轴承可转动地安装在主支撑架底部,其上端通过联轴器与主舵机连接,所述主舵机安装在主舵机支撑架上,所述主舵机支撑架通过螺栓安装在主支撑架上;所述垃圾暂存容器通过光轴套件安装在光轴上,四个垃圾储存容器位于垃圾暂存容器的下方并且围绕光轴布置;
9.所述满载检测装置包括主控板、显示屏和四个用于检测垃圾储存容器中的垃圾是否满载的红外测距传感器,四个红外测距传感器与四个垃圾储存容器一一对应,并且位于
相应垃圾储存容器的上方,同时分别通过连接件安装在主支撑架的四个角的竖杆上,所述主控板和显示屏安装在主支撑架的顶部,所述次舵机、openmv摄像头、主舵机、显示屏和四个红外测距传感器均与主控板连接。
10.进一步,所述主支撑架包括铝型材和角码,所述铝型材和铝型材之间通过角码并且使用螺栓相连接。
11.本实用新型的有益效果主要表现在:本垃圾智能识别分类存储装置在满足现有相关领域垃圾分类装置的基础上,具有高效、体积小和占地面积小的优势;装置搭载有垃圾识别装置,使得垃圾分类更加的准确,有效提高垃圾分类的效率;装置还外加有显示屏可进行垃圾分类宣传片的播放并与满载检测装置结合可进行垃圾满载预警,使其更加智能化;促进城市的垃圾分类进程,促进智能化绿色化城市的发展。
附图说明
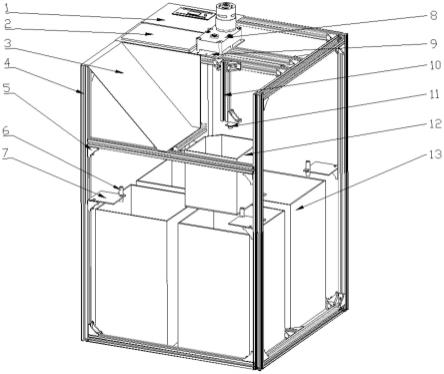
12.图1是本实用新型的结构示意图。
13.图2是本实用新型在去掉四个垃圾储存容器后的示意图。
14.图3是旋转机构与载物台配合的示意图。
具体实施方式
15.下面结合附图对本实用新型作进一步描述。
16.参照图1~图3,一种垃圾智能识别分类存储装置,包括主支撑架、垃圾收集装置、垃圾识别装置、垃圾分类装置、满载检测装置和四个垃圾储存容器13,所述四个垃圾储存容器13分别为可回收垃圾储存容器、厨余垃圾储存容器、有害垃圾储存容器和其他垃圾储存容器;所述主支撑架包括铝型材4和角码5,所述铝型材4和铝型材4之间通过角码5并且使用螺栓相配合连接。
17.所述垃圾收集装置包括滑道3、垃圾暂存容器12、用于下放垃圾的活动载物台和用于活动载物台旋转的旋转机构,所述滑道倾斜安装在主支撑架上,所述垃圾暂存容器的上端口位于滑道下端处,活动载物台设置在垃圾暂存容器的下端口处,并且与垃圾暂存容器形成用于盛装垃圾的空间,所述旋转机构包括次舵机16和次舵机支撑架17,所述次舵机通过次舵机支撑架安装在垃圾暂存容器的外侧面上,同时所述次舵机通过舵盘使用螺栓与活动载物台19偏心配合连接,通过偏心连接实现垃圾暂存容器下端口的开闭,从而实现垃圾下放到相应的垃圾存储容器内;所述滑道3通过螺栓安装在主支撑架上,所述次舵机支撑架17通过螺栓安装在垃圾暂存容器一侧。所述次舵机16通过螺栓再与次舵机支撑架17相配合,当次舵机16转动时可带动活动载物台19进行旋转。
18.所述垃圾识别装置包括固定件10、用于识别垃圾的摄像头和角码5。摄像头采用openmv摄像头11,该摄像头内置有现有的垃圾识别程序,并且设置在初始状态下的垃圾暂存容器上端口上方,初始状态是指垃圾暂存容器还没有旋转,位于滑道下方时,所述固定件10通过角码5使用螺栓安装在主支撑架上,所述openmv摄像头11安装在固定件10上。
19.所述垃圾分类装置包括主舵机支撑架9、主舵机8、光轴14、轴承15和光轴套件18。所述光轴14竖向设置在主支撑架的中部,并且其下端通过轴承15可转动地安装在主支撑架底部,所述主舵机8通过联轴器与光轴14的上端配合连接,所述主舵机支撑架9通过螺栓安
装在主支撑架上,所述主舵机8再通过螺钉安装在主舵机支撑架9上;所述轴承15通过螺栓安装在主支撑架底部;所述光轴14再与轴承15相配合,所述光轴套件18与光轴14相配合,所述垃圾暂存容器12通过螺栓安装在光轴套件18上,光轴套件18安装在光轴14上,四个垃圾储存容器13位于垃圾暂存容器的下方并且围绕光轴布置;当主舵机8转动时可带动垃圾暂存容器12、活动载物台19和旋转机构进行一起旋转,然后将垃圾倒入相应的垃圾储存容器13中。
20.所述满载检测装置包括主控板1、显示屏2、四个用于检测垃圾储存容器13中的垃圾是否满载的红外测距传感器6和四个连接件7。四个红外测距传感器与四个垃圾储存容器13一一相对应,并且位于相应垃圾储存容器的上方,同时分别通过连接件安装在主支撑架的四个角的竖杆上,红外测距传感器通过测量其与垃圾储存容器内的垃圾的距离,相对测量出垃圾的高度,来判断垃圾是否满载,所述主控板1和显示屏2安装在主支撑架顶部,所述次舵机16、openmv摄像头11、主舵机8、显示屏2和四个红外测距传感器6均与主控板1连接。所述连接件7通过角码5安装在主支撑架上,所述红外测距传感器6再与连接件7相配合。
21.本实用新型的具体使用方法如下:
22.投入垃圾,其将顺着滑道3滑入垃圾暂存容器12与活动载物台19围成的空间内,垃圾识别装置再对垃圾进行识别,openmv摄像头11将信息反馈至显示屏2中显示出所识别垃圾的类别,接着主控板1控制垃圾分类装置将垃圾暂存容器12和活动载物台19旋转至对应类别的垃圾储存容器13正上方,再控制旋转机构的次舵机16,让活动载物台向外旋转90
°
,使得垃圾暂存容器失去对垃圾的支撑,最终垃圾依靠自身重力掉入对应的垃圾储存容器13中。当相应的红外测距传感器检测垃圾储存容器13中的垃圾达到容量的75%时,则判定该垃圾储存容器13为满载,并在此时显示屏2会显示出对应类别的垃圾进行满载预警。当无垃圾投入时,显示屏2会循环播放垃圾分类宣传片。
23.最后,需要注意的是,以上列举的仅是本实用新型的具体实施例。显然,本实用新型不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本实用新型公开的内容中直接导出或联想到的所有变形,均应认为是本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1