一种自动取食品装置的制作方法
1.本实用新型涉及一种配送食品技术,特别是从食品存放处提取食品的技术。
背景技术:
2.现有的包括公共食堂、快餐店、外卖的餐品配送的食品配送,其中公共食堂只能设置在就餐人数众多的单位内,如学校、大型企事业单位,就餐人数较少的单位,如只有几个或者十几个人的公司,只能由各人自主解决,解决的方式要么到办公点附近的快餐店,要么叫外卖,现今,由于写字楼越来越大,往往一栋写字楼里面有数量庞大的公司,虽然每个公司里面员工数量不多,但是,各个公司的员工加起来的总数是很多的,依赖外卖,依赖就餐的成本高,二来受外卖特性所决定,由于外卖品类众多,满足数量庞大的就餐人员的外卖需要大量的送餐人员而且送餐时间段分散,而送餐时间段往往是下班的高峰,电梯服务是满足不了这样的送餐要求的,因此,会大量出现送餐时间长而影响就餐人员的就餐,受外卖的技术所制约,传统的外卖送餐,采用的个人两轮电动车送餐,能服务的距离短,即使在公共食堂或者快餐店就餐,由于就餐人员密集,不可避免的会有疾病传播的风险。
技术实现要素:
3.本实用新型的发明目的在于提供一种在避免食物传送人员与食物需求人员接触的同时,方便大量的食物需求人员及时提取食物的自动取食物方法及装置。
4.本实用新型的自动取食品装置是这样实现的,包括提取箱、设置在提取箱内的用于放置移动箱子的定位工位、设置在提取箱内的位于定位工位旁的由控制装置控制的机械手,提取箱设置有保温层,定位工位所放置的移动箱子设置有数个用于装载包装食物的存放空间,存放空间面向机械手的前侧面是敞口,提取箱的侧面设置有提取包装食品的窗口。
5.使用时,将本实用新型预先放置在设定的食品提取地点处(如办公楼的大堂内),食品制作部门依据食品提取者选取的食品品类、数量以及相应的食品提取地点信息,生产食品并将食品打包成包装食品,将包装食品放置在移动箱子的存放空间里面,并依据食品品类及在移动箱子的存放空间的位置生成提取食品识别码,该信息发送到食品提取者的账户(如手机)上,或者与食品提取者预留的独有的识别信息(如刷脸信息)匹配,是该独有的识别信息成为提取食品识别码,然后,将装满包装食品的移动箱子送到食品提取地点处并放进提取箱内的定位工位上(若提取箱内有之前的移动箱子,则将之前的移动箱子取出,再放进新的移动箱子),这样,包装食品在移动箱子内的准确位置信息就能确定,机械手就能依据包装食品在移动箱子内的准确位置信息抓取包装食品,同时,将包装食品就位的信息发送到食品提取者的账户(如手机)上,食品提取者依据提取食品识别码信息到食品提取地点提取包装食品,提取包装食品时,将提取食品识别码发送到控制装置上(如通过扫码的方式发送提取食品识别码信息或者刷脸的方式发送提取食品识别码信息),控制装置依据提取食品识别码信息,控制机械手有序动作,从移动箱子相应的存放空间里面取出包装食品,然后送到提取包装食品的窗口上,以便食品提取者取走包装食品。
6.机械手包括设置在封闭的提取箱内的纵向导轨、沿纵向导轨前后移动的活动机架、带动活动机架纵向前后移动的纵向移动动力、设置在活动机架上的竖向导轨、沿竖向导轨上下移动上下移动活动架、带动上下移动活动架上下移动的上下移动动力、设置在上下移动活动架上的抓取机构。
7.这里,提取箱是封闭的提取箱,提取箱内设置有灭菌杀毒装置(如紫外光或者臭氧发生器),通过灭菌杀毒装置对封闭的提取箱内进行灭菌杀毒,以保证封闭的提取箱内的洁净,保证餐品的安全。
8.上下移动活动架上设置有紫外光的灭菌杀毒装置,这样,随着上下移动活动架上的移动,紫外光的灭菌杀毒装置就能对经过的移动箱子的存放空间内的包装食品进行紫外线灭菌。
9.在提取箱内设置有包括加热和制冷在内的温度调节装置。
10.在提取箱内设置有加热恒温装置,以保持封闭的提取箱内的温度维持在一较高的温度,使早餐、午餐快餐等包装食品里面的食品温度保持在可口暖和的用餐温度范围内,同时,若保持封闭的提取箱内温度维持在60℃以上,就能有效地杀灭细菌以及避免细菌的滋生。
11.在封闭的提取箱内设置有冷藏制冷装置,冷藏制冷装置是单独具有冷藏制冷功能的冷藏制冷装置,或是既具有冷藏制冷功能的冷藏制冷装置,同时也是具有加热恒温功能的加热恒温装置。这样,当所配送的是生鲜食物时,就启动采用冷藏制冷装置,使封闭的提取箱成为保鲜冷藏室,以保持生鲜食物的新鲜。采用既具有冷藏制冷功能,也具有加热恒温功能冷藏制冷装置,就能在不同时段(如早餐用餐时段、午餐用餐时段、下午采购生鲜时段)使封闭的提取箱具有不同的温度氛围,使封闭的提取箱满足储藏不同性质食物的需要。
12.在封闭的提取箱四周墙壁设置有保温层,以减少封闭的提取箱内的热量或者冷能的散失,以进一步保证餐品的包装食物具有可口的用餐温度或者,生鲜包装食物的新鲜。
13.移动箱子分成数层,每层有数个存放空间。这样,每个存放空间的位置就能以坐标标定,以方便机械手依据坐标信息往存放空间存放包装食品或者从存放空间内取出包装食品。
14.在移动箱子的存放空间的顶部设置有弹片,以便通过弹片将包装食品压制在存放空间里面,防止其从存放空间里面滑出来,同时,又不妨碍机械手从两边夹持包装食品,以便将包装食品从存放空间里面取出。
15.在移动箱子底部四个角上设置有轮子,轮子的中部设置有与移动箱子敞口平行的导槽或者导轨,对应的在封闭的提取箱的定位工位设置有导轨或者导槽,以便顺滑准确地将移动箱子推入封闭的提取箱内。
16.设置有冷藏式食品收集容腔,冷藏式食品收集容腔设置有带有电动门的食品投放口及带有门的清理口。
17.使用时,当过了提取食品时间段后(如过了用餐时间),还存留有未被取走的包装食品时,通过机械手将这些包装食品传送至冷藏式食品收集容腔内,在封闭的冷藏式食品收集容腔内,保证包装食品不会变质,直至下一次送入移动箱子时,再将这些丢弃的包装食品从清理口清理出来,从而避免长时间存放在移动箱子内的包装食品变质,而污染封闭的提取箱内空间。
18.用于放置移动箱子的定位工位有两个,分别设置在机械手的两边。设置两定位工位,可有效地利用封闭的提取箱的空间,使其所存放的包装食品数量显著地增大,以便在有限的空间内为更多的食品提取者提供食品配送服务。
19.提取包装食品的窗口上设置有电动门。当食品提取者要提取窗口内的包装食品时,电动门才打开,包装食品被取走后,电动门关闭,从而保证提取箱处于封闭状态,避免受到外界的污染。
20.提取包装食品的窗口内的提取箱内设置有带有台面的封闭空间,封闭空间的面向提取箱的侧面设置有包装食品传递口。封闭空间内设置有灭菌消毒装置。机械手从移动箱子取出包装食品后,通过包装食品传递口将包装食品送入台面上,以便食品提取者通过提取包装食品的窗口提取包装食品。平时,通过灭菌消毒装置对封闭空间进行灭菌消毒。
21.提取箱的侧面设置有带有门的门口,门铰接在门口的底部,以便由下往上来回翻转,实现关门及开门。这样,开门后,往下翻转的门的上表面就成了导向斜面,以便移动箱子沿该导向斜面推进作为提取箱的封闭的箱子里面。
22.在提取箱内设置有移动箱子定位监测装置。通过定位监测装置的检测,保证移动箱子准确定位在提取箱里面,以便机械手依照存放空间的位置坐标数据,准确顺畅地从存放空间内提取包装食品。
23.本实用新型采用工厂化生产包装食品以及集中配送,食品提取者在食品提取地点自取的技术,这样,即使在不容易设置公共食堂的大型写字楼或者小企业众多的工业区,也能满足人数众多的食品提取者(如用餐者)的取用包装食品的需求,而且,食品提取者提取包装食品方便快捷,食品提取者提取早餐或快餐等包装食品后,可回到各自的办公地点用餐,从而避免了聚集性用餐所产生的疾病传播的问题。使用本发明技术后,可以采用工厂化生产,可选择用地成本低的地方设置食品制作部门,这样就能有效地降低投资成本,同时,也便于卫生控制,另外,由于可以集中的大批量配送,因此,能进行远距离投送,从而极大地扩大了所能服务的地域,能显著扩包装食品的食品品类,以满足食品提取者对不同食品品类的包装食品的要求。
24.本实用新型与已有技术相比,其有益效果是:具有在避免食物传送人员与食物需求人员接触的同时,方便大量的食物需求人员及时提取食物的优点。
25.附图说明:
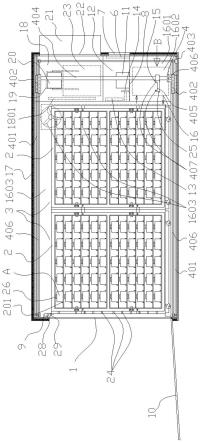
26.图1为本实用新型的结构示意图;
27.图2为一侧设置移动箱子的图1b向视图;
28.图3为两侧设置移动箱子的图1b向视图;
29.图4为抓取机构的结构示意图;
30.图5为抓取机构抓取其中一侧包装食品到窗口的原理图;
31.图6为抓取机构抓取另一侧包装食品到窗口的原理图;
32.图7为电路控制图;
33.图8为包装食品配送过程图。
34.具体实施方式:
35.现结合附图和实施例对本实用新型做进一步详细描述:
36.如图1、2所示,本实用新型包括封闭的提取箱1、设置在提取箱1内的用于放置移动
箱子2的定位工位3、设置在封闭的提取箱1内的位于定位工位3旁的机械手4、控制装置5,定位工位3所放置的移动箱子2设置有数个用于装载包装食品a的存放空间201,存放空间201面向机械手4的前侧面是敞口,机械手4包括设置在封闭的提取箱1内的纵向导轨401(纵向导轨401有两套,分别位于封闭的提取箱1的底部和顶部)、沿纵向导轨401前后移动的活动机架402(活动机架402有两个,分别沿提取箱1的底部的纵向导轨401、顶部的纵向导轨401前后移动)、带动活动机架402纵向前后移动的纵向移动动力403(纵向移动动力403包括电机驱动部分、由电机驱动部分驱动转动的丝杆、由丝杆带动的且固定在活动机架402上的螺母,或者纵向移动动力403包括电机驱动部分、由电机驱动部分驱动部分驱动的同步轮、由同步轮带动的同步带,同步带连接在活动机架402上,附图中显示的是后者)、设置在活动机架402上的竖向导轨404(竖向导轨404将底部的纵向导轨401、顶部的纵向导轨401固定连接在一起)、沿竖向导轨404上下移动上下移动活动架405、带动上下移动活动架405上下移动的上下移动动力406(上下移动动力406包括电机驱动部分、由电机驱动部分驱动转动的丝杆、由丝杆带动的且固定在上下移动活动架405上的螺母,或者上下移动动力406包括电机驱动部分、由电机驱动部分驱动部分驱动的同步轮、由同步轮带动的同步带,同步带连接在上下移动活动架405上,附图中显示的是后者)、设置在上下移动活动架405上的抓取机构407,封闭的提取箱1的其中一侧面设置有带有门9的门口10,封闭的提取箱1的门9上或者封闭的提取箱1的另一侧面上设置有带有窗门6的窗口7,窗口7内侧设置有台面8(本实施例采用的是后者),窗门6是人工打开的门,或者是由送出的包装食品a推开的常闭的活动门,或者是电动门,控制装置5控制机械手4和作为窗门6的电动门动作。
37.这里,门口10的门9铰接在门口的底部,以便由下往上来回翻转,实现关门及开门。
38.窗口7内侧台面8位于带有包装食品送入口11的封闭的空间12,封闭的空间12内设置有灭菌消毒装置13(如紫外灯)。这样,通过灭菌消毒装置13来保证封闭的空间12的洁净。工作时,抓取机构407将包装食品a从包装食品送入口11送入封闭的空间12,然后,作为窗门6的电动门打开,灭菌消毒装置13关闭,以便食品提取者提取包装食品a。
39.在封闭的空间12设置有包装食品推送装置14,通过包装食品推送装置14将包装食品a往窗口7推送,以便食品提取者提取包装食品a。
40.封闭的提取箱1内设置有紫外光的灭菌杀毒装置15,紫外光的灭菌杀毒装置15设置在上下移动活动架405上,当然,除上下移动活动架405外的封闭的提取箱1内的其他位置,也可以装设紫外光的灭菌杀毒装置15或者其他的灭菌杀毒装置(如臭氧发生装置)。
41.在封闭的提取箱1内设置有加热恒温装置16,加热恒温装置16是气体加热恒温装置,通过设置在电器室1601内的气体加热装置1602往封闭的提取箱1提供高温气体(如箭头所示),通过封闭的提取箱1顶部的气体回流装置回流回来气体加热装置1602进行加热(如箭头所示),提升封闭的提取箱1内的温度,从而保证封闭的提取箱1内的包装食品a的食品温度维持高温状态。
42.在封闭的提取箱1内设置有冷藏制冷装置,冷藏制冷装置是单独具有冷藏制冷功能的冷藏制冷装置,或是既具有冷藏制冷功能的冷藏制冷装置,同时也是具有加热恒温功能的加热恒温装置16(本实施例采用的是后者),这样,在封闭的提取箱1内就设置了既能加热,也能制冷的温度调节装置了。
43.加热恒温装置16的热能通过加热热风导入带有风扇的导风管1603,经导风管1603
进一步加热后再由风扇吹出到封闭的提取箱1内,导风管1603的进口处设置臭氧发生器,这样,就能保证加热热风的温度达到60℃以上,以满足加热和保温早餐、快餐的包装食品a的食品加热和保温要求。
44.封闭的提取箱1设置有保温层17。
45.设置有冷藏式食品收集容腔18(设置制冷装置1801),冷藏式食品收集容腔18设置有带有电动的门19的食品投放口20及带有门页21的清理口22。冷藏式食品收集容腔18放置有食品收集容器23。
46.如图所示,用于放置移动箱子2的定位工位3有两个,分别设置在机械手4的两边。
47.如图1所示,移动箱子2里面的存放空间201分成数层,每层排布有数个存放空间201,数个存放空间201呈纵横分布,这样,就很方便地对各个存放空间201进行坐标标定,从而方便了机械手4的准确抓取。
48.对应每层存放空间201的移动箱子2的侧壁上设置有标识24,上下移动活动架405上设置有用于检测标识24的定位检测器25。通过工作时,先通过定位检测器25检测标识24,以确定每层存放空间的纵向的坐标以及起始的坐标,从而使机械手4的准确移动到相应的存放空间201处来抓取包装食品a。
49.如图1所示,在移动箱子2的存放空间201的顶部设置有弹片26。弹片26的作用是将包装食品a压紧定位在存放空间201内。弹片26的形状呈外凸弧形,这样,包装食品a在机械手4的取送作用力的作用下,就能顺利地进出存放空间。
50.如图1、2、3所示,在移动箱子2底部四个角上设置有轮子202,轮子202的中部设置有与移动箱子2的存放空间201的侧面敞口平行的导槽203(或者导轨,导轨的导入端设置有方便导入导槽的导入结构,如导入端呈圆弧形),对应的在封闭的提取箱1的底部设置有导轨27(或者导槽,若是导轨,导轨的导入端设置有方便导入导槽的导入结构,如导入端呈圆弧形)。移动箱子2左边或者右边的两个轮子202运行方向是固定的且与移动箱子2存放空间201的侧面敞口平行,移动箱子2右边或者左边的两个轮子202是万向轮。这样,移动箱子2的导槽203(或者导轨)既容易沿导轨27(或者导槽)导入进封闭的提取箱1内,同时,也能通过万向轮进行转向,以方便移动箱子2移动并调整移动方向。
51.如图4所示,抓取机构407包括导向台4071、设置在导向台4071两侧的由动力机构4072(如由电动传动动力带动的齿轮、与齿轮啮合的齿条)带动的沿轨道前后移动的活动杆4073(如与齿条固定连接的抽屉导轨)、设置活动杆4073端部(可以是其中的一端,也可以是两端)的动力钩4074、设置在活动杆4073中部的动力推杆4075。
52.在提取箱1内设置有定位移动箱子2的监测装置28和将移动箱子锁定的锁定机构29。
53.如图7所示,控制装置5的电信号输入端与定位检测器25的电信号输出端、监测装置28的电信号输出端相连,机械手4的电信号输入端、作为窗门6的电动门的电信号输入端、灭菌消毒装置13的电信号输入端、食品推送装置14的电信号输入端、紫外光的灭菌杀毒装置15的电信号输入端、加热恒温装置16的电信号输入端、电动的门19的电信号输入端、冷装置1801的电信号输入端与控制装置5的电信号输出端相连。
54.如图5所示,取送其中一侧的移动箱子2的包装食品a到台面8时,机械手4的抓取机构407移动到其中一侧的移动箱子2的相应的存放空间201的前方,动力机构4072驱动活动
杆4073往其中一端前伸,使活动杆4073其中一端的动力钩4074前伸到其中一侧的移动箱子2的相应存放空间201里面的包装食品a后端,活动杆4073的动力钩4074翻出并挡在包装食品a后面,动力机构4072驱动活动杆4073复位,将包装食品a从导向台4071其中一端推入导向台4071内,机械手4的抓取机构407移动到台面8侧面,动力机构4072驱动活动杆4073移动,使动力推杆4075移动到导向台4071内的包装食品a的前面,动力推杆4075翻出并挡在包装食品a前面,动力机构4072驱动活动杆4073前伸,使动力推杆4075将包装食品a从导向台4071其中一端推出并从包装食品送入口11推入台面8内,然后,食品推送装置14将包装食品a推到窗口7,以便食品提取者取包装食品a。
55.如图6所示,取送另一侧的移动箱子2的包装食品a到台面8时,机械手4的抓取机构407移动到另一侧的移动箱子2的相应的存放空间201的前方,动力机构4072驱动活动杆4073往导向台4071另一端前伸,使活动杆4073另一端的动力钩4074前伸到另一侧的移动箱子2的相应存放空间201里面的包装食品a后端,活动杆4073另一端的动力钩4074翻出并挡在包装食品a后面,动力机构4072驱动活动杆4073复位,将包装食品a从导向台4071另一端推入导向台4071内,机械手4的抓取机构407移动到台面8侧面,动力机构4072驱动活动杆4073移动,使动力推杆4075移动到导向台4071内的包装食品a的后端,动力推杆4075翻出并挡在包装食品a后面,动力机构4072驱动活动杆4073伸入台面8,使动力推杆4075将包装食品a从导向台4071其中一端推出并从包装食品送入口11推入台面8内,然后,食品推送装置14将包装食品a推到窗口7,以便食品提取者提取包装食品a。
56.如图8所示,所配送的是餐品时,首先是移动终端点餐过程,即先预先确定餐品,然后将餐品品类发至点餐平台d网页上,用餐者(食品提取者)在移动终端e上浏览点餐平台d网页并确定餐品,同时,依据点餐平台d网页预设的多个取餐点(食品提取地点)确定取餐点,点餐平台d将餐品信息及相应的取餐点信息发送到餐品制作部门f(食品制作部门)(如a取餐点共有a类餐品10个、b类餐品5个、c类餐品1个、d类餐品16个);
57.然后是餐品制作过程,即餐品制作部门f依据点餐平台d所发送的点餐信息,在餐品生产线上生产餐品,餐品制作完毕并按照标准打包,成为包装食品a(如快餐盒分别装载米饭和菜品,然后上下将两快餐盒叠放并固定),在包装食品a的包装的设定位置上标记餐品品类编码信息g(如在包装的前端面或者顶面贴上二维码标识),投放经食品存放工位h的扫码机i扫码获取箱子标识j(移动箱子2上的专属信息码)(如b1)的移动箱子2到食品存放工位h内,然后由输送带k将包装食品a传送到食品存放工位h内,编码识别装置l通过识别餐品品类编码信息g获取餐品品类信息,食品存放工位h机械手m在存放控制装置的控制下随机将打包好的包装食品a送进移动箱子2的存放空间201里面(如移动箱子2共4层,每层共4格存放空间201,由下往上共编为第1、2、3、4层,每层从左到右编为第1、2、3、4格的存放空间201,放置包装食品a 时,从最下面的最左边开始投放,先放进第1层的第1格的存放空间201,然后是第一层的第2格的存放空间201,第1层放满后,就放进第2层的第1格的存放空间201
……
,如此类推,直至4层的所有4格的存放空间201都放满包装食品a为止,如传输带依序先后传送a品类餐品的包装食品a 共5个、b品类餐品的包装食品a共5个、c品类餐品的包装食品a共5个、a品类餐品的包装食品a共5个、c 品类餐品的包装食品a共1个、d品类餐品的包装食品a共16个,这样,b1移动箱子2里第1层由左到右放置4个a品类餐品的包装食品a,第2层由左到右放置1个a品类餐品的包装食品a和3个b品类餐品的包装食品a,第3层由左到右
放置2个b品类餐品的包装食品a和2个a品类餐品的包装食品a,第4层由左到右放置3个a品类餐品的包装食品a和1个c品类餐品的包装食品a,这样,第1层的第1格上的a品类餐品的包装食品a的位置是b1移动箱子2的11位置,如此类推,就能确定所有的在b1移动箱子2上的包装食品a的位置),然后将包装食品a及该包装食品a在移动箱子2的存放空间201里面的位置信息、取餐点位置信息以及移动箱子2的箱子标识组合成一个信息(如b1移动箱子2的第1层的第1格的存放空间201上的a品类餐品的包装食品a的餐品电子信息是a1b111a,其中a是取餐点信息,a后面的1是第一个移动箱子2,b1是移动箱子2的箱子标识,11是包装食品a在b1移动箱子2里面的位置,a是餐品品类,b2移动箱子2的第1层的第1格的存放空间201上的包装食品a的餐品品类d的餐品电子信息是a2b211d),同一移动箱子2里面的所有包装食品a电子信息打包成电子信息包并相应将该移动箱子2的箱子标识j确定为电子信息包的标识码(如b1,当然,也可以依据该箱子标识j生成电子信息包的标识码),并将电子信息包的标识码及相应的电子信息包发送到点餐平台d上;
58.然后是餐品运送过程,即移动箱子2装车前,先用装车处的扫码机n扫描移动箱子2上的箱子标识j,并发送到点餐平台d上,然后装上汽车p(如a取餐点共有第1和第2的箱子标识分别是b1和b2的移动箱子2,由于第1比第2先放置好包装食品a,装车时,先装第1的箱子标识是b1的移动箱子2,然后再装第2的箱子标识是b2的移动箱子2),依据装车前的扫箱子标识j对照相应的电子信息包所获得的取餐点地址信息(如取餐点a),导航到取餐点,取餐点的扫码机q扫描移动箱子2上的箱子标识j并确定该移动箱子2是属于该取餐点的移动箱子2后,将属于该取餐点的移动箱子2依序送入取餐点的封闭的提取箱1内并依序定位(由于装车时,先放第1的箱子标识是b1的移动箱子2,然后再放第2的箱子标识是b2的移动箱子2,因此,提取时,先提取第2的箱子标识是b2的移动箱子2,然后再提取第1的箱子标识是b1的移动箱子2,定位后,移动箱子2里面的包装食品a的位置就确定并定位),并将餐品到达取餐点的信息发送到点餐平台d,同时,点餐平台d将送入取餐点的封闭的提取箱1内的移动箱子2的电子信息包传送到取餐点的封闭的提取箱1内的控制装置5上,点餐平台d将餐品到达取餐点的信息发送到移动终端e,并对应移动终端e所点的餐品生成包含餐品信息、包装餐品a在封闭的提取箱1内的位置信息的取餐信息(如b1的移动箱子2的第1层第1存放空间的a品类餐品的包装食品a生成的取餐信息码是a1b111a00001,其中a是取餐点信息,a后面的1是第一个移动箱子2,b1是移动箱子2的箱子标识,11是包装食品a在b1移动箱子2里面的位置,a是a品类餐品的包装食品a,00001是依据点餐的时间循序确定点餐人的编码),并使提取码(可以随机生成的二维码或者取餐者提供的独有的标识)匹配该取餐信息,使提取箱1的控制装置5获取该取餐信息及相应的提取码(如通过网络将该信息发送到控制装置5);
59.餐品提取过程是提取码拥有者(如果是随机生成的二维码,则可通过点餐平台d发送到提取码拥有者预留的账户(点餐时的用餐者)上,当然,提取码也可以是刷脸信息)依据提取码到取餐点,由提取箱1的扫码机r扫码后获得餐品信息(包括包装食品a在封闭的提取箱1内的信息),通过控制装置5控制提取箱1的机械手4动作,依据餐品信息上的包装食品a的位置信息,确定包装食品a所在的移动箱子2的存放空间201的位置,控制机械手4到移动箱子2的相应存放空间201里面取出包装食品a并送到台面8上,同时,作为窗门6的电动门打开,以便取餐者从窗口7取用台面8上的包装食品a(如图1所示)。
60.本发明自动取食品方法是这样实现的,将装载有包装食品a的移动箱子2放进提取
箱1里面并准确定位,移动箱子2设置有数个装载有包装食品a的存放空间201,存放空间201面向提取箱1里面的机械手4的前侧面是敞口,同时,使提取箱1的控制装置5获取移动箱子2的存放空间201的位置信息、相应的存放在存放空间201内的包装食品a的品类信息和提取包装食品a的提取码信息,获得提取码的食品提取者向提取箱1的检测装置(如扫码机或者刷脸装置)出示提取码后,提取箱1的控制装置5通过机械手4从移动箱子2的相应的存放空间201内取出包装食品a,并让食品提取者提取。
61.提取码是依据所提取的包装食品a的食品品类、包装食品a的食品提取地点、获取提取码信息的账号所生成的标识(如二维码),也可以是食品提取者所提供的独有的标识(如通过刷脸的脸部特性标识)。
62.为了提升提取包装食品a的效率,机械手4提取包装食品a后,将包装食品a送入提取箱1上的带有提取包装食品a的窗口7的台面8上,然后,复位到起始位置,以便进行下一个包装食品a的提取。
63.所提取的包装食品a的食品包括熟食食品(如早餐、午餐、晚餐)、生鲜食品,当所配送的包装食品a的食品由熟食食品转换为生鲜食品时,停止加热恒温装置,先清理提取箱1里面的残留的熟食食品的包装食品a到冷藏式食品收集容腔18内,然后对提取箱1里面进行灭菌杀毒,然后,启动采用冷藏制冷装置,使封闭的提取箱1成为保鲜冷藏室,以保持生鲜食物的新鲜;当所配送的包装食品a的食品由生鲜食品转换为熟食食品时,停止冷藏制冷装置,先清理提取箱1里面的残留生鲜食品的包装食品a到冷藏式食品收集容腔18内,然后对提取箱1里面进行灭菌杀毒,然后启动加热恒温装置16,以保持封闭的提取箱1内的温度维持在一较高的温度。
64.对应每层存放空间201的移动箱子2的侧壁上设置有标识24(即移动箱子上的机械手的位置校准信息),移动箱子2装入提取箱1里面并定位后,机械手4上的定位检测器25先检测标识24,以确定每层存放空间201的纵向的坐标以及起始的坐标,使机械手4依据位置信息准确移动到相应的存放空间处来抓取包装食品a。
65.所述移动箱子2上带有箱子标识(专属信息码),提取箱1识别正确的情况下才能将移动箱子2装入提取箱1。即往提取箱1内投放移动箱子2时,提取箱1内的监测装置28扫码移动箱子2的箱子标识来确定所投放的移动箱子2是否是该取餐点的提取箱1所要接纳的移动箱子2以及该所接纳的移动箱子2是否依照循序进入提取箱1内,从而保证移动箱子2准确地被投放进正确取餐点的提取箱1的正确的定位工位3上,从而保证机械手4正确地取出所需的包装食品a。
66.包括将包装食品a在移动箱子2中的位置信息及移动箱子2的结构同步到提取箱1;
67.所述位置信息包括包装食品a在第几行、第几列;
68.所述移动箱子2上有机械手4的校准信息,提取箱1中的机械手4根据校准信息进行校准,所述校准具体为计算横坐标的起始零点,以及每个横排所在的纵坐标;
69.然后机械手4根据位置信息确定包装食品a对应的坐标,机械手4依据坐标获取对应的包装食品a,然后将包装食品a传递给食品提取者。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1