智能电缆放线轮子的制作方法
1.本实用新型涉及一种电缆敷设装置,是一种智能电缆放线轮子。
背景技术:
2.在工矿企业或者楼宇项目中,电缆敷设中使用的放线轮子都是压在已经敷设的电缆上,都要靠人将电缆放到轮子上;如果轮子不固定,拉电缆时,轮子常常会翻;如果轮子已经固定,当电缆要放在轮子下面时,又要将轮子拆开;电缆敷设完毕,要人为从轮子上将电缆拿下来;桥架中要敷设多根电缆,要靠人在桥架中排布电缆,费时费力,尤其在弯道处。
技术实现要素:
3.本实用新型的目的在于克服上述缺陷,提供一种实现方便,性能可靠且使用范围广的智能电缆放线轮子。
4.为了实现上述目的,本实用新型采用的技术方案如下:
5.一种智能电缆放线轮子架设在桥架上方,并且让多功能电缆桥架轨道小车能够通过;智能电缆放线轮子的接近开关检测到轨道小车通过,发信号给控制器,控制器控制智能电缆放线轮子动作,托起轨道小车拉的电缆;当电缆敷设完毕,控制器控制所有智能电缆放线轮子动作,并且根据电缆在桥架中的排布位置,使电缆水平横向移动到合适位置,然后,同时放开电缆,掉入到桥架中的合适位置。
6.一种智能电缆放线轮子,包括支架、水平双线轨丝杆滑台模组、垂直双线轨丝杆滑台模组、操作机械手双线轨丝杆滑台模组、接近开关、机械手、驱动器和控制器,所述水平双线轨丝杆滑台模组固定在所述支架上,所述垂直双线轨丝杆滑台模组固定在所述水平双线轨丝杆滑台模组上,所述操作机械手双线轨丝杆滑台模组固定在所述垂直双线轨丝杆滑台模组上,所述机械手固定在所述操作机械手双线轨丝杆滑台模组上,因此,所述机械手能够在桥架上水平方向、垂直方向上移动,所述机械手包括门框、移动颈、左肩膀、左肩膀轴、左臂、左臂门轴、左臂肩轴、右肩膀、右肩膀轴、右臂、右臂门轴和右臂肩轴,移动颈和门框在操作机械手双线轨丝杆滑台模组的作用下发生相对位移,左肩膀绕左肩膀轴旋转,导致左臂绕左臂门轴和左臂肩轴旋转,同理,右臂绕右臂门轴和右臂肩轴旋转,左臂和右臂靠拢或者分开,所述左臂和右臂上都焊接有轮子,左臂和右臂分开时,电缆在所述左臂和右臂之间移动时,导致接近开关动作,引起控制器发出信号控制操作机械手双线轨丝杆滑台模组动作,致使左臂和右臂靠拢,将电缆托起,电缆在左臂和右臂的轮子上移动。
7.所述支架包括两个人字支架、前横担、后横担和横梁,所述前横担和后横担都在电缆桥架底部,与桥架底部固定在一起,并与桥架敷设方向垂直,所述两个人字支架分别固定在电缆桥架两侧,并与前横担和后横担固定在一起,所述横梁固定在两个人字架的顶端,所述水平双线轨丝杆滑台模组固定在横梁上。
8.所述水平双线轨丝杆滑台模组包括:水平电机、水平滑台底板、水平丝杆和水平滑块,所述垂直双线轨丝杠滑台模组包括:垂直电机、垂直滑台底板、垂直丝杆和垂直滑块,所
述操作机械手双线轨丝杆滑台模组包括操作机械手电机、操作机械手滑台底板、操作机械手丝杆、操作机械手滑块和操作机械手滑台底板尾端;所述垂直滑台底板与水平滑块固定在一起;所述操作机械手底板与垂直滑块固定在一起。
9.所述操作机械手滑块与所述移动颈固定在一起,操作机械手底板尾端与所述门框固定在一起。
10.水平电机旋转依次带动水平丝杆转动、水平滑块移动、垂直滑台底板做水平移动、操作机械手双线轨丝杆滑台模组以及机械手做水平移动;当垂直电机旋转时,依次带动垂直滑块移动、操作机械手滑台底板以及机械手做垂直移动;当操作机械手电机旋转时,操作机械手滑块移动,所述移动颈与门框发生相对位移,左臂和右臂靠拢或者分开。
11.所述水平双线轨丝杆滑台模组和垂直双线轨丝杠滑台模组取消,只保留所述操作机械手双线轨丝杆滑台模组,所述操作机械手底板固定在水平支架上,取消所述操作机械手电机,用摇把代替,得到手动电缆放线轮子。
12.所述机械手的形状和轮子位置根据安装在电缆桥架直线段、水平弯通段、垂直弯通段上选择。
13.所述垂直双线轨丝杆滑台模组根据支架高度调整情况,决定是否安装。
14.所述操作机械手双线轨丝杆滑台模组可以用气缸装置代替。
附图说明
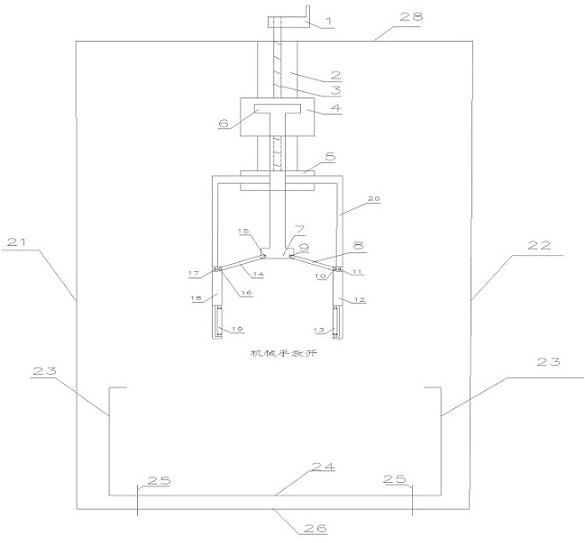
15.图1为本实用新型-实施例1的结构示意图。
16.图2为本实用新型-实施例1的支架俯视图。
17.图3为本实用新型-实施例1的支架左视图。
18.图4为本实用新型-实施例1的机械手托起图
19.图5为本实用新型-实施例2的结构示意图。
20.图6为本实用新型-实施例2的支架俯视图。
21.图7为本实用新型-实施例2的支架左视图。
22.图8为本实用新型-实施例2的机械手托起图
23.图9为本实用新型-实施例3的结构示意图。
24.图10为本实用新型-实施例3的支架俯视图。
25.图11为本实用新型-实施例3的支架左视图。
26.图12为本实用新型-实施例3的水平左弯桥架上机械手托起图。
27.图13为本实用新型-实施例3的水平右弯桥架上机械手托起图。
28.图14为本实用新型-实施例4的结构示意图。
29.图15为本实用新型-实施例4的支架俯视图。
30.图16为本实用新型-实施例4的支架左视图。
31.图17为本实用新型-实施例4机械手托起图。
32.图18为本实用新型-实施例4的机械手向下推压电缆图。
具体实施方式
33.下面结合附图和实施例对本实用新型作进一步说明,本实用新型的实施方式包括
但不限于下列实施例。
34.实施例1
35.如图1、2、3、4所示,是手动操作托起电缆和放开电缆的实施例;前横担26、后横担27与桥架底部24通过螺栓25固定在一起,右侧人字支架的左腿22下端与前横担26固定在一起;右腿30下端与后横担27固定在一起;左侧人字支架固定方式与右侧相同;横梁28的两端分别与左侧人字支架、右侧人字支架的顶端固定在一起。
36.双线轨丝杆滑台模组的底板2与横梁28固定在一起;固定板6和滑块4固定在一起,固定板6与移动颈7是一个整体;滑台底板尾端5与门框20固定在一起;旋转摇把1带动丝杆3旋转,带动滑块4和移动颈7移动,和门框20产生相对位移,左肩膀14绕左肩膀轴15旋转,带动左臂18绕左臂门轴17和左臂肩轴16旋转;移动颈7上移时,左臂18逆时针旋转,移动颈7下移时,左臂18顺时针旋转;移动颈7上移时,右臂12顺时针旋转,移动颈7下移时,右臂12逆时针旋转;移动颈7上移时,左臂18和右臂12靠拢,将电缆托起,电缆在轮子19和13上移动。
37.当电缆敷设到目的地后,反方向旋转摇把1,移动颈7下移,左臂18和右臂12分开,电缆掉落到桥架内。
38.实施例2
39.如图5、6、7、8所示,是水平直段桥架上智能电缆放线轮子自动托起电缆和放开电缆的实施例;前横担35、后横担39与桥架底部33通过螺栓34固定在一起,右侧人字支架的左腿31下端与前横担35固定在一起;右腿37下端与后横担39固定在一起;左侧人字支架固定方式与右侧相同;横梁36的两端分别与左侧人字支架、右侧人字支架的顶端固定在一起。
40.水平双线轨丝杆滑台模组与横梁36固定在一起;垂直双线轨丝杆滑台模组的底板7与水平滑块4固定在一起;操作机械手双线轨丝杆滑台模组的底板11与垂直滑块9固定在一起;固定板15与移动颈16是一个整体,固定板15与操作机械手滑块13固定在一起;门框29与操作机械手底板尾端14固定在一起。
41.智能电缆放线轮子动作过程如下:多功能电缆桥架轨道小车在智能电缆放线轮子下通过时,接近开关40检测到轨道小车上的检测板后,发信号给控制器,控制器控制智能电缆放线轮子的操作机械手电机10旋转,带动丝杆12旋转,带动操作机械手滑块13、固定板15和移动颈16一起向上移动;右肩膀17绕右肩膀轴18顺时针旋转,使得右臂21绕右臂肩轴19和右臂门轴20顺时针旋转;左臂27绕左臂肩轴25和左臂门轴26逆时针旋转;左臂轮子28和右臂轮子22靠拢,并托起电缆。
42.进一步的,为了减少电缆到横梁36之间的垂直距离,减少电缆拉力力臂,控制器控制垂直电机6旋转,带动垂直丝杆8旋转,带动垂直滑块9和操作机械手底板11、机械手和电缆一起上移。
43.进一步的,当电缆敷设到达目的地后,控制器根据电缆在桥架中排布位置,旋转水平电机1,带动水平丝杆3旋转,使得水平滑块4、垂直底板7、操作机械手双线轨丝杆滑台模组、机械手和电缆一起水平移动到合适位置;控制器旋转垂直电机6旋转,带动电缆下移到合适位置。
44.进一步的,控制器旋转操作机械手电机10,使得机械手左臂27顺时针旋转,右臂21逆时针旋转,放开电缆,电缆掉入桥架中合适位置。
45.实施例3
46.如图9、10、11、12、13所示,是水平弯通桥架上智能电缆放线轮子自动托起电缆和放开电缆的实施例;要求机械手上既有水平轮子又有垂直轮子,垂直轮子用于电缆转弯;在一个水平桥架弯道上需要安装3个智能电缆放线轮子,控制器控制3个水平电机旋转,带动垂直双线轨丝杆滑台模组、操作机械手双线轨丝杆滑台模组、机械手和电缆一起横向移动,调节电缆转弯位置和电缆弯曲形状。
47.如果电缆左转弯,电缆靠在机械手的左臂轮子移动;如果电缆右转弯,电缆靠在机械手的右臂轮子移动。
48.智能电缆放线轮子动作过程如下:多功能电缆桥架轨道小车在智能电缆放线轮子下通过时,接近开关42检测到轨道小车上的检测板后,发信号给控制器,控制器控制智能电缆放线轮子的操作机械手电机10旋转,带动丝杆12旋转,带动操作机械手滑块13、固定板15和移动颈16一起向上移动;右肩膀17绕右肩膀轴18顺时针旋转,使得右臂21绕右臂肩轴19和右臂门轴20顺时针旋转;左臂27绕左臂肩轴25和左臂门轴26逆时针旋转;左臂轮子41和右臂轮子40靠拢,并托起电缆。
49.为了减少电缆到横梁36之间的垂直距离,减少电缆拉力力臂,控制器控制垂直电机6旋转,带动垂直丝杆8旋转,带动垂直滑块9和操作机械手底板11、机械手和电缆一起上移。
50.当电缆敷设到达目的地后,控制器根据电缆在桥架中排布位置,旋转水平电机1,带动水平丝杆3旋转,使得水平滑块4、垂直底板7、操作机械手双线轨丝杆滑台模组、机械手和电缆一起水平移动到合适位置;控制器旋转垂直电机6旋转,带动电缆下移到合适位置。
51.控制器旋转操作机械手电机10,使得机械手左臂27顺时针旋转,右臂21逆时针旋转,放开电缆,电缆掉入桥架中合适位置。
52.实施例4
53.如图14、15、16、17、18所示,是垂直下弯通桥架上智能电缆放线轮子自动托起电缆和放开电缆的实施例;垂直下弯通桥架上智能电缆放线轮子在桥架的最低点,智能电缆放线轮子压着电缆,不是托着电缆。
54.智能电缆放线轮子动作过程如下:多功能电缆桥架轨道小车在智能电缆放线轮子下通过时,接近开关40检测到轨道小车上的检测板后,发信号给控制器,控制器控制智能电缆放线轮子的操作机械手电机10旋转,带动丝杆12旋转,带动操作机械手滑块13、固定板15和移动颈16一起向上移动;右肩膀17绕右肩膀轴18顺时针旋转,使得右臂21绕右臂肩轴19和右臂门轴20顺时针旋转;左臂27绕左臂肩轴25和左臂门轴26逆时针旋转;左臂轮子28和右臂轮子22靠拢,并托起电缆。
55.为了减少电缆到横梁36之间的垂直距离,减少电缆拉力力臂,控制器控制垂直电机6旋转,带动垂直丝杆8旋转,带动垂直滑块9和操作机械手底板11、机械手和电缆一起上移,当电缆被用力拉时,电缆靠在轮子41移动。
56.当电缆敷设到达目的地后,控制器根据电缆在桥架中排布位置,旋转水平电机1,带动水平丝杆3旋转,使得水平滑块4、垂直底板7、操作机械手双线轨丝杆滑台模组、机械手和电缆一起水平移动到合适位置。
57.控制器旋转操作机械手电机10,使得机械手左臂27顺时针旋转,右臂21逆时针旋转,放开电缆,电缆掉入桥架中;控制器旋转操作机械手电机10,使得机械手左臂27逆时针
旋转,右臂21顺时针旋转,左臂27与右臂21靠拢,控制器旋转垂直电机6旋转,推动电缆下移,使得电缆在桥架上从悬空到贴在桥架内电缆上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1