带定位功能的机械手的制作方法
1.本实用新型属于机械技术领域,涉及一种带定位功能的机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置;它可代替人的繁重劳动以实现生产的机械化和自动化,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。机械手一般是真空吸附或凹槽装载方式把物料运转,需要经过外部机械定位装置进行定位,因此,设计出一种带定位功能的机械手是很有必要的。
技术实现要素:
3.本实用新型的目的是针对现有的技术存在上述问题,提出了一种带定位功能的机械手。
4.本实用新型的目的可通过下列技术方案来实现:带定位功能的机械手,包括机械手臂,其特征在于,所述机械手臂上安装有定位板,定位板上具有用于定位物料的定位凹槽,定位板和推挤块活动连接,推挤块与定位板之间还具有弹簧,推挤块上还连接有转动件。
5.所述推挤块和导轨相连,导轨上滑动连接有滑块,定位板和滑块相连。
6.所述导轨上固定有弹簧挡块,弹簧安装在弹簧挡块与定位板两者之间。
7.所述定位板还和绝缘底座相连。
8.所述转动件为轴承。
9.所述机械手臂上还开设有定位孔。
10.与现有技术相比,本带定位功能的机械手具有该优点:
11.该机械手是安装在现有设备上的,当机械手运动至放料处后,现有设备下方的开关先向外推开轴承,进而把推挤块推开,将入料口变大,便于物料轻松放入到机械手的定位凹槽处,当物料放入到定位凹槽后,该开关就会松开轴承,在弹簧的作用下会拉动推挤块向内复位,把物料推到定位凹槽的角落内,从而达到定位的效果,通过这个设计可以确保物料精准定位,大大保证了物料质量;即利用定位板的定位凹槽配合定向推挤块运动,把物料定位到设计好的角落内,以达到定位效果,在每个机械手上融入这设计,从而以达到运送和定位一起实现,使用效果好。
附图说明
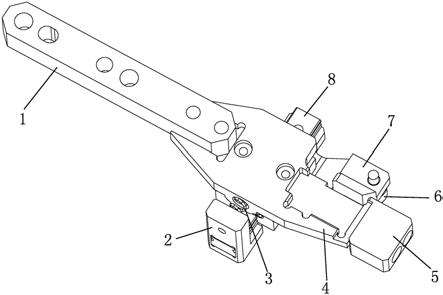
12.图1是本实用新型中定位状态下的立体结构示意图。
13.图2是本实用新型中推开状态下的立体结构示意图。
14.图3是本实用新型的爆炸示意图。
15.图4是本实用新型中拆去部分的立体结构示意图。
16.图5是本实用新型中定位板的立体结构示意图。
17.图6是本实用新型中推挤块的立体结构示意图。
18.图7是本实用新型中实际工作下的立体结构示意图。
19.图中,1、机械手臂;2、弹簧挡块;3、弹簧;4、定位板; 4a、定位凹槽;5、绝缘底座;6、转动件;7、推挤块;8、导轨; 9、滑块。
具体实施方式
20.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
21.如图1-图7所示,本带定位功能的机械手,包括机械手臂1,机械手臂1上安装有定位板4,定位板4上具有用于定位物料的定位凹槽4a,定位板4和推挤块7活动连接,推挤块7与定位板 4之间还具有弹簧3,推挤块7上还连接有转动件6。
22.推挤块7和导轨8相连,导轨8上滑动连接有滑块9,定位板4和滑块9相连。
23.导轨8上固定有弹簧挡块2,弹簧3安装在弹簧挡块2与定位板4两者之间。
24.定位板4还和绝缘底座5相连。
25.转动件6为轴承。
26.机械手臂1上还开设有定位孔。
27.在实际应用中,因为机械手是固定在现有设备的一个圆盘上或者一个运动条上,所以接下来的机械手也能继续放料,这能有效的连续把精准定位后的物料运送到每一道工序,也能节省时间,增加产出。
28.以上部件均为通用标准件或本技术领域人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
29.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
技术特征:
1.带定位功能的机械手,包括机械手臂(1),其特征在于,所述机械手臂(1)上安装有定位板(4),定位板(4)上具有用于定位物料的定位凹槽(4a),定位板(4)和推挤块(7)活动连接,推挤块(7)与定位板(4)之间还具有弹簧(3),推挤块(7)上还连接有转动件(6)。2.根据权利要求1所述的带定位功能的机械手,其特征在于,所述推挤块(7)和导轨(8)相连,导轨(8)上滑动连接有滑块(9),定位板(4)和滑块(9)相连。3.根据权利要求2所述的带定位功能的机械手,其特征在于,所述导轨(8)上固定有弹簧挡块(2),弹簧(3)安装在弹簧挡块(2)与定位板(4)两者之间。4.根据权利要求1所述的带定位功能的机械手,其特征在于,所述定位板(4)还和绝缘底座(5)相连。5.根据权利要求1所述的带定位功能的机械手,其特征在于,所述转动件(6)为轴承。6.根据权利要求1所述的带定位功能的机械手,其特征在于,所述机械手臂(1)上还开设有定位孔。
技术总结
本实用新型提供了一种带定位功能的机械手。它解决了现有机械手一般是真空吸附或凹槽装载方式把物料运转,需要经过外部机械定位装置进行定位等技术问题。本带定位功能的机械手,包括机械手臂,其特征在于,所述机械手臂上安装有定位板,定位板上具有用于定位物料的定位凹槽,定位板和推挤块活动连接,推挤块与定位板之间还具有弹簧,推挤块上还连接有转动件。件。件。
技术研发人员:蔡庆鑫 丘劭晖 杨洁
受保护的技术使用者:浙江庆鑫科技有限公司
技术研发日:2021.08.27
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1