一种电池模组搬运夹具的制作方法
1.本实用新型涉及动力电池搬运设备技术领域,特别是涉及一种电池模组搬运夹具。
背景技术:
2.动力电池是新能源汽车的重要组成部件,随着动力电池系统的快速发展,为了满足批量生产、运输和储存的需求,企业多采用机械夹具对电池模组进行自动抓取、搬运和加工操作。目前汽车动力电池的发展方向已逐步向大模组、pack空间紧凑化方向发展,为了节约空间,模组端板上留给夹具抓取的空间也越来越小,采用吸盘进行搬运的夹具逐渐增多。现在电动汽车大多适用于suv等底盘较高的汽车,pack位置比较靠后,并且为了降低厚度常采用平躺方式将电芯放入pack,但是侧面焊接busbar的难度较大,因此在模组工艺上往往采用立式焊接,在放入pack过程中将电芯进行翻转使其平躺入箱。但是现有的机械夹具在夹取电池模组进行搬运时,电池模组的移动轨迹比较固定单一,不支持在转运过程中灵活旋转以调整电池模组的姿态。并且夹具通过吸盘吸取电池模组时,吸盘在吸取方向上受力能力较强,但切向受力能力较弱,在电池模组举升的过程中,吸盘在切向方向上受模组重力作用,容易出现吸盘损坏或者模组脱落的危险,严重影响吸盘的使用寿命与操作的安全系数。此外,现有夹具的托底机构大多采用摆杆,承重能力较弱,也不存在缓冲调节位置的功能,当位置出现偏差时容易压坏电池模组。
技术实现要素:
3.针对现有技术中存在的不足,本实用新型提供了一种电池模组搬运夹具操作方便,安全性能高,在夹取搬运电池模组的过程中,可以自由旋转改变模组的方向,夹持稳定性好,不会损伤电池模组,并且吸盘的使用寿命较长,电池模组不会轻易脱落。本实用新型能够有效解决现有电池模组机械夹具存在的无法灵活旋转调整电池模组姿态、夹取稳定性较差、夹具吸盘使用寿命较短、电池模组易损坏脱落等技术问题。
4.为了实现上述技术目的,本实用新型采用以下技术方案:
5.一种电池模组搬运夹具,包括安装架,所述安装架上固定安装有用于连接外部装置的法兰盘,所述安装架的顶部设有侧面压紧机构,所述侧面压紧机构包括压杆和驱动所述压杆前后移动的气缸,所述压杆用于压紧电池模组的侧面,所述安装架的侧面设有若干组吸盘,所述吸盘与所述压杆的作用面位置相对,用于吸附电池模组的另一侧面,所述安装架的底部设有托底机构,所述托底机构位于电池模组的底部防止其坠落。
6.进一步地,所述安装架上还安装有端块,所述端块与所述压杆的位置相对并能够贴附在电池模组的表面,用于保证吸盘的吸附位置使其紧贴电池模组的表面。
7.进一步地,所述吸盘、托底机构和端块上均设置有用于保护电池模组的浮动机构,能够调节与其所连接的部件在短距离范围内滑动,起到减振缓冲作用,避免电池模组被挤压损坏,所述浮动机构上连接有传感器用于输出报警。
8.进一步地,在所述安装架的侧面两端还分别设置有连接传感器的限位机构,用以防止所述压杆过度压紧电池模组,保护电池模组避免其被损坏,同时也起到保护吸盘的作用。
9.进一步地,所述侧面压紧机构设置至少两组,对称地分布在所述法兰盘的两侧,所述压杆呈l形,位于电池模组的上方,所述压杆的一端与所述气缸相连,另一端与电池模组的侧面相接触。
10.进一步地,所述托底机构设置至少两组,对称地设置在所述安装架的两端。
11.本实用新型提供的电池模组搬运夹具的有益效果如下:
12.本实用新型的电池模组搬运夹具适用于六轴机器人的第六轴,结构简单,操作方便,安全性能高,夹持稳定性好,电池模组不会轻易脱落,也不会损伤电池模组,吸盘的使用寿命较长。本实用新型通过吸盘单面吸取电池模组,在放置模组的过程中夹具不会与放置电池模组的托盘相互干涉;在电池模组的底部设置托底机构来承担电池模组的重力,防止吸盘的切向受力过大,提高夹具的安全系数,延长吸盘的使用寿命;通过设置侧面压紧机构,从侧面压紧电池模组,夹具在夹取搬运电池模组的过程中,可以自由旋转改变模组的方向,将电池模组翻转90度也不会坠落;在吸盘、托底机构和端块上均设置可以自动回缩的浮动机构,防止夹具在抓取过程中出现挤压模组的情况,并且每个浮动机构均连接限位传感器能进行及时输出报警。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
14.图1是本实用新型的电池模组搬运夹具的立体结构示意图;
15.图2是图1中“a”处的局部放大图;
16.图3是本实用新型的电池模组搬运夹具的另一立体结构示意图;
17.图4是本实用新型的电池模组搬运夹具的另一立体结构示意图;
18.图5是本实用新型的电池模组搬运夹具的前视图;
19.图6是本实用新型的电池模组搬运夹具的右视图;
20.图7是本实用新型的电池模组搬运夹具的俯视图;
21.图8是本实用新型的夹具夹取电池模组时的工作示意图;
22.图9是本实用新型的夹具夹取电池模组进行方向翻转时的示意图。
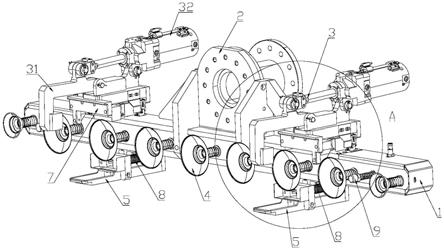
23.图中标号说明:1、安装架;2、法兰盘;3、侧面压紧机构;31、压杆;32、气缸;4、吸盘;5、托底机构;6、电池模组;7、端块;8、浮动机构;9、限位机构。
具体实施方式
24.下面将结合附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例
26.如图1和图3所示,本实施例提供的电池模组搬运夹具,包括安装架1,安装架1上固定安装有用于连接外部装置的法兰盘2,安装架1的顶部设有侧面压紧机构3。如图2和图8所示,法兰盘2的两侧对称地设置两组侧面压紧机构3,侧面压紧机构3包括压杆31和驱动压杆31前后移动的气缸32。压杆31呈l形,位于电池模组6的上方,压杆31的一端与气缸32相连,另一端与电池模组6的侧面相接触,用于压紧电池模组6的侧面。
27.如图1、图5和图7所示,安装架1的侧面设有若干组吸盘4,吸盘4与压杆31的作用面位置相对,用于吸附电池模组6的另一侧面。如图1和图9所示,安装架1的底部对称地设置两组托底机构5,托底机构5位于电池模组6的底部防止其坠落。
28.如图2至图4、图6和图8所示,吸盘4、托底机构5和端块7上均设置有用于保护电池模组6的浮动机构8。浮动机构8为套设有螺旋弹簧的滑动件,能够调节与其所连接的部件在短距离范围内滑动,起到减振缓冲作用,避免电池模组6被挤压损坏。浮动机构8上连接有传感器用于输出报警。
29.如图3所示,安装架1上还安装有l形的端块7,端块7与压杆31的位置相对并能够贴附在电池模组6的顶部边角位置,用于保证吸盘4的吸附位置使其紧贴电池模组6的表面。如图1所示,在安装架1的侧面两端还分别设置有连接传感器的限位机构9,用于保护电池模组6,防止压杆31过度压紧电池模组6而损坏吸盘4。
30.本实用新型的电池模组搬运夹具在使用时:
31.搬运夹具通过法兰盘2与六轴机器人的第六轴连接,通过机器人旋转将夹具调至图8的姿态去抓取电池模组6,随着夹具不断靠近电池模组6,端块7逐渐与电池模组6的侧面接触。为保证吸盘4与电池模组6贴合紧密,端块7和吸盘4上的浮动机构8被压缩,确保吸盘4始终贴紧电池模组6。托底机构5位于电池模组6下方,与其之间保持1~3mm的间隙,起到托举电池模组6的作用,防止吸盘4承受过大的切向力。当电池模组6被吸盘4吸住之后,通过气缸32驱动压杆31紧贴电池模组6的侧面,将其向吸盘4的方向压紧。通过机器人的旋转运动,可以将电池模组6进行90度翻转,如图9所示,此时由于侧面压紧机构3的存在,电池模组6不会因为翻转过程中的转矩而发生晃动。
32.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1