一种自动化上料机器人的制作方法
1.本实用新型属于工业机器人的技术领域,具体涉及一种自动化上料机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机械装置,它能自动执行工作,是通过自身的驱动和控制用来完成各种工业任务的一种机器设备。在目前很多工厂都对工业机器人有大量需求,随着机器人使用比例的不断提高,自动化机器人的出现将带动我国机器人使用密度的提升,从而带动机器人需求数量的提升。目前很多工件上料搬运过程大多数由工人完成,自动化的机器人普及水平低,其工作量大且具有一定的危险性,并且人工上料的效率非常低,针对这些问题推出一种自动化上料机器人,实现工业领域发展的需要。
技术实现要素:
3.本实用新型的目的是为了解决人工上料搬运效率非常低的问题,而提出一种自动化上料机器人。
4.为了实现上述目的,本实用新型采用了如下技术方案:所述的一种自动化上料机器人,包括升降组件、机械臂和机械爪;所述的机械臂一端安装于升降组件上,所述的机械臂另一端连安装在机械爪上。所述的机械爪能够实现工件的抓取和翻转功能,所述的机械臂和升降组件能够实现上料机器人的升降功能。
5.进一步地,所述的升降组件包括连杆一、连杆二、连杆三、连杆四、向心关节轴承、圆柱滚子轴承、定位铜板、润滑铜板、连杆支座、焊接挡块、油缸、轨道安装法兰、油缸支座、底座和销轴。所述的连杆一通过第一销轴与油缸支座相连,另一端通过第一销轴和焊接挡块与连杆二连接在一起,所述的连杆二通过第一销轴和焊接挡块与连杆三连接在一起,所述的连杆三另一端通过套有向心关节轴承的第一销轴与摆臂底板连接,所述的连杆二的另一端通过第一销轴与连杆四连接在一起,所述的第一销轴设置在连杆支座上,并且套有定位铜板、润滑铜板和圆柱滚子轴承,所述的连杆四通过第一销轴和焊接挡块与油缸连接在一起,另一端通过套有圆柱滚子轴承的第一销轴与摆臂底板连接,所述的油缸通过第一销轴和焊接挡块连接在油缸支座上,所述的油缸支座焊接在底座上,所述的底座通过轨道安装法兰与地面进行连接。所述的升降组件将两个油缸作为驱动,通过油缸的驱动实现上料机器人的升降功能。
6.进一步地,所述的机械臂包括摆臂底板、摆动油缸固定座、摆臂轴、摆臂连杆、销轴、挡块、升降油缸、ge60et关节轴承、外盖、 ge80et关节轴承、轴套。所述的摆臂底板分别与连杆三和连杆四通过第一销轴进行连接,上端通过摆臂轴和摆臂连杆进行连接,所述的摆臂轴上套有轴套和ge80et关节轴承,并且设置在摆臂底板的轴孔内通过外盖固定起来,所述的摆臂连杆通过第二销轴和挡块与升降油缸的活塞杆进行连接,所述的升降油缸通过ge60et关节轴承设置在摆动油缸固定座上。所述的机械臂通过升降油缸进行驱动,通过油
缸活塞杆的运动使得机械臂进行升降运动,实现了上料机器人的升降功能。
7.进一步地,所述的机械爪包括钳头装置、翻钳装置和同步杆。所述的钳头装置和翻钳装置连接在一起,并且通过同步杆将两个钳头装置连接在一起,实现同步抓取的功能。所述的机械爪能够通过翻钳装置的旋转功能和钳头装置的抓取功能,实现机器人对工件的抓取和上料功能。
附图说明
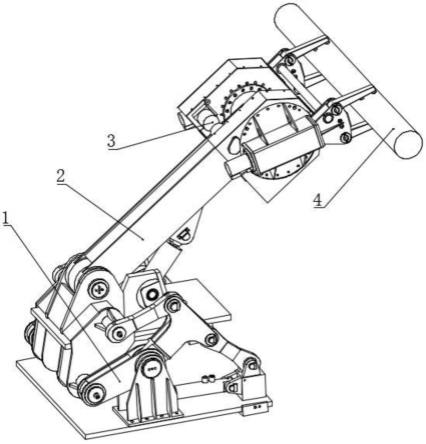
8.图1为本实用新型提出的一种自动化上料机器人的结构图;
9.图2为本实用新型提出的一种自动化上料机器人升降组件的爆炸图;
10.图3为本实用新型提出的一种自动化上料机器人机械臂的爆炸图;
11.图4为本实用新型提出的一种自动化上料机器人机械爪的爆炸图;
12.图中:升降组件1、机械臂2、机械爪3、工件4、连杆一101、连杆二102、连杆三103、连杆四104、向心关节轴承105、圆柱滚子轴承106、定位铜板107、润滑铜板108、连杆支座109、焊接挡块 110、油缸111、轨道安装法兰112、油缸支座113、底座114、第一销轴115、摆臂底板201、摆动油缸固定座202、摆臂轴203、摆臂连杆204、第二销轴205、挡块206、升降油缸207、ge60et关节轴承 208、外盖209、ge80et关节轴承210、轴套211、钳头装置301、翻钳装置302、同步杆303。
具体实施方式
13.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
14.参照图1-4,一种自动化上料机器人,包括升降组件1、机械臂2 和机械爪3;机械臂2一端安装于升降组件1上,机械臂2另一端连接在机械爪3上。机械爪3能够实现工件的抓取和翻转功能,机械臂 2能够实现抓取工件的升降功能,升降组件1能够实现在轨道上滑动的功能。
15.参照图1-4,一种自动化上料机器人,升降组件包括连杆一101,连杆一101通过第一销轴115与油缸支座113连接,另一端通过第一销轴115和焊接挡块110与连杆二102连接在一起,连杆二102通过第一销轴115和焊接挡块110与连杆三103连接在一起,连杆三103 另一端通过套有向心关节轴承105的第一销轴115与摆臂底板201连接,连杆二102的另一端通过第一销轴115与连杆四104连接在一起,第一销轴115设置在连杆支座109上,并且套有定位铜板107、润滑铜板108和圆柱滚子轴承106,连杆四104通过第一销轴115和焊接挡块110与油缸111连接在一起,另一端通过套有圆柱滚子轴承106 的第一销轴115与摆臂底板201连接,油缸111通过第一销轴115和焊接挡块110连接在油缸支座113上,油缸支座113焊接在底座114 上,底座114通过轨道安装法兰112与地面进行连接。升降组件1将两个油缸111作为驱动,通过油缸活塞杆的运动实现上料机器人的升降功能。
16.参照图1-4,一种自动化上料机器人,机械臂2包括摆臂底板201,摆臂底板201下端分别与连杆三103和连杆四104通过第一销轴115 进行连接,上端通过摆臂轴203和摆臂连杆204进行连接,摆臂轴 203上套有轴套211和ge80et关节轴承210,并且设置在摆臂底板 201的轴孔内通过外盖209固定起来,摆臂连杆204通过第二销轴205 和挡块206与升降油缸
207的活塞杆进行连接,升降油缸207通过 ge60et关节轴承208设置在摆动油缸固定座202上。机械臂2通过升降油缸207进行驱动,通过油缸活塞杆的运动使得机械臂2进行升降运动,实现了机器人的工件搬运的升降功能。
17.参照图1-4,一种自动化上料机器人,机械爪3包括钳头装置301、翻钳装置302和同步杆303。钳头装置301和翻钳装置302连接在一起,并且通过同步杆303将两个钳头装置301连接在一起,实现同步抓取的功能。机械爪3能够通过翻钳装置302的旋转功能和钳头装置 301的抓取功能,实现机器人对工件的上料抓取功能。
18.本实用新型提出的一种自动化上料机器人,在使用时,需将升降组件1中的油缸111接液压控制系统,机械臂2中的升降油缸207需要连接液压控制系统,机械爪3中的钳头装置301需要连接液压控制系统,翻钳装置302需要连接电气控制系统。
19.以上所述,仅为本实用新型较佳的具体实施方式,本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用信息揭露的技术范围内,根据本实用新型的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1