一种饮品后道二次包装线上的合流机构及其智能控制方法与流程
1.本发明涉及包装机械技术领域,具体涉及一种饮品后道二次包装线上的合流机构及其智能控制方法。
背景技术:
2.合流机构是生产、包装、物流等环节中重要的设备,可将上一工序的两个输送线上的产品合并到一个输送线上以送至下一道工序。现有的合流机构有三角合流、垂直合流、立体式合流等,但现有合流机构,产品在合流时会出现转向、磕碰、卡滞、合流分配不合理问题,转向可能导致下一工序不能正常进行,磕碰可能损坏产品,卡滞则直接影响合流机构的合流,合流分配不合理导致一条输送线产品较少(严重时无产品)而另一条产品拥堵(甚至无法接收上一工序中新运来的产品),亟需一种能够解决转向、磕碰、卡滞及合流分配不合理、不智能等问题的合流机构或合流机构控制方法。
技术实现要素:
3.为此,本发明提供一种饮品后道二次包装线上的合流机构及其智能控制方法,以解决上述的一个或多个技术问题。
4.为了实现上述目的,本发明提供如下技术方案:
5.本发明的第一方面提供了一种饮品后道二次包装线上的合流机构,包括四通道分离输送机构和双通道输送机构、换道机构、第二传感器以及控制器;
6.所述四通道分离输送机构包括四个并行的通道,各通道均设有第二传送带,各第二传送带分别通过第二电机单独控制;
7.所述双通道输送机构包括两个并行的通道,各通道均设有第四传送带;
8.所述换道机构包括第三传送带、换道拨件和伸缩器;第三传送带衔接在第二传送带和第四传送带之间;换道拨件后端铰接在换道机构的机架上且位于双通道输送机构的两通道之间,前端可摆动;伸缩器固定在换道机构的机架上,伸缩器的移动端与换道拨件铰接,以使换道拨件前端摆动至四通道分离输送机构的左侧两通道之间或右侧两通道之间;
9.所述第二传感器固定在双通道输送机构机架上且位于第二传送带的尾端,当第二传送带尾端经过或有产品时,生成第二类电信号;
10.所述控制器与第二传感器、第二电机、伸缩器电连接,控制器基于第二类电信号以控制第二电机的启停以及伸缩器的伸缩。
11.进一步地,所述四通道分离输送机构的四个并行通道还均设有第一传送带,第一传送带的尾端与第二传送带的头端衔接,第一传送带的速度小于第二传送带的速度,各第一传送带分别通过第一电机单独控制;
12.所述合流机构还包括第一传感器,第一传感器固定在双通道输送机构机架上且位于第一传送带的尾端,当第一传送带尾端经过或有产品时,生成第一类电信号;
13.所述控制器与第一传感器、第一电机电连接,控制器基于第一类电信号、第二类电
信号以控制第一电机的启停。
14.进一步地,所述换道机构还包括第三电机;所述合流机构还包括第三传感器、报警器和控制电机供电电路的急停开关;
15.所述第三传送带通过第三电机单独控制;
16.所述第三传感器固定在换道机构的机架上且位于第三传送带的上方,当第三传送带上经过或有产品时,生成第三类电信号;
17.所述控制器与第三传感器、第三电机、报警器、急停开关电连接,控制器基于第三类电信号以控制第三电机的启停、报警器报警、急停开关断电。
18.进一步地,所述第四传送带为小节距滚珠网带输送。
19.进一步地,所述伸缩器为气动伸缩器,包括与气源连接的气缸和与气缸伸缩连接的气动推杆,气缸固定于机架,气动推杆与换道拨件铰接,气缸与气源之间的进气和回气管路上设有电磁阀,控制器与电磁阀电连接以控制气动推杆的伸缩。
20.进一步地,所述换道拨件包括两根横杆、多个包胶辊、第一竖板、第二竖板、多个滚轮、第一竖轴和第二竖轴;两根横杆一上一下间隔设置,包胶辊竖向设置且两端可转动连接在两根横杆上,第一竖板设置于横杆的上方且沿横杆的走向设置,第二竖板设置于第一竖板的上方且两者垂直,机架的顶板设有弧形槽,第二竖板穿过弧形槽,滚轮设置在第二竖板的一侧,多个滚轮分为上下两行且两行滚轮分别位于顶板的上下侧,第一竖轴固定在第一竖板的顶部并与伸缩器的移动端铰接,第二竖轴固定在横杆的顶部且上端与换道机构的机架横梁可转动连接。
21.本发明的第二方面提供了一种饮品后道二次包装线上的合流机构的智能控制方法,基于本发明的第一方面提供的合流机构实现的,包括换道控制方法;
22.所述换道控制方法包括如下步骤:
23.步骤s11,换道拨件的前端位于一侧的两通道之间,位于该侧的两个第二传送带转动以向前输送产品,位于该侧的两个第二传感器连续生成并发送第二类电信号,控制器接收该侧的两个第二传感器发送的第二类电信号并计数;
24.步骤s12,当计数数值等于预设的数量阈值时,控制器控制该侧的两个第二电机停止转动;经过预设时间t后,控制器控制伸缩器伸或缩,使换道拨件的前端从该侧的两通道之间换到另一侧的两通道之间;
25.步骤s13,换道完成后,控制器控制另一侧的两个第二电机启动以带动该侧两个第二传送带向前输送产品;同时,该侧的两个第二传感器连续生成并发送第二类电信号,控制器接收该侧的两个第二传感器发送的第二类电信号并计数;
26.重复执行步骤s12和s13。
27.进一步地,合流机构的智能控制方法还包括补货控制方法;
28.所述补货控制方法包括如下步骤:
29.步骤s21,控制器控制换道拨件开始换道时,控制器收到当前侧的两个第二传感器分别发送的第一个第一类电信号后,则控制器分别控制该通道的第二电机停止转动,完成第二传送带的补货;
30.步骤s22,第二传送带补货完成后,该侧控制器分别接收到该侧第一传感器发送的第一个第一类电信号后,分别控制该通道的第一电机停止转动,完成第一传送带的补货。
顶板,239-弧形槽,241-气缸,242-气动推杆,243-电磁阀;
51.3-双通道输送机构,31-第四传送带,32-第四电机;
52.4-第一传感器,5-第二传感器,6-第三传感器,7-急停开关,8-报警器,9-控制器。
具体实施方式
53.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
55.实施例1
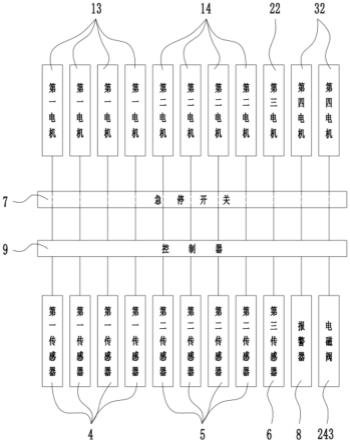
56.如图1-9所示,实施例1提供了一种饮品后道二次包装线上的合流机构,也是一种四进二合流机构,包括四通道分离输送机构1、换道机构2、双通道输送机构3、第一传感器4、第二传感器5、第三传感器6、急停开关7、报警器8、控制器9(plc板、微处理器等)以及机架(三大机构可以共用一个整体机架,也可以各自设有独立机架,机架起固定、支撑作用,机架属于常规设计,不做详细介绍)。
57.四通道分离输送机构1包括四个并行的通道,各通道均设有第一传送带11和第二传送带12。第一传送带11为低速传送带,第二传送带12为高速传送带,第二传送带12的头端与第一传送带11的尾端相衔接,第一传送带11上堆积的产品运到第二传送带12后,通过差速拉开产品间距,以便计数和并规避卡包。各第一传送带11分别通过第一电机13单独控制,各第二传送带12分别通过第二电机14单独控制。四个通道共设八个传送带,每个传送带被一个电机控制,八个电机在控制器9的控制下独立启停。
58.换道机构2包括第三传送带21、第三电机22、换道拨件23和伸缩器24。第三传送带21衔接在第二传送带12和第四传送带31之间,通过第三电机22单独控制,第三电机22在控制器9的控制下启停。换道拨件23后端铰接在机架上且位于双通道输送机构3的两通道之间,前端可摆动。伸缩器24固定在机架上,伸缩器24的移动端与换道拨件23铰接,以使换道拨件23前端摆动至四通道分离输送机构1的左侧两通道之间或右侧两通道之间。换道拨件23包括两根横杆231、多个包胶辊232、第一竖板233、第二竖板234、多个滚轮235、第一竖轴236和第二竖轴237;两根横杆231一上一下间隔设置;包胶辊232竖向设置且两端可转动连接在两根横杆231上,多个包胶辊232沿横杆231的长度方向间隔分布;第一竖板233设置于横杆231的上方,并沿横杆231的走向设置;第二竖板234设置于第一竖板233的上方,两者垂直;机架的顶板238设有弧形槽239,第二竖板234穿过弧形槽239;滚轮235设置在第二竖板234的一侧,多个滚轮235分为上下两行且两行滚轮235分别位于顶板的上下侧;第一竖轴236固定在第一竖板233的顶部,与气动推杆242的移动端铰接;第二竖轴237固定在横杆231的顶部,第二竖轴237的上端与机架横梁可转动连接,在本实施例中,第二竖轴237处于第三传送带21的尾端,以便使换道拨件23的后端绕第二竖轴237转动时,其前端能够在四通道分离输送机构1的第一二通道间与第三四通道间摆动。伸缩器24为电动伸缩器24、气动伸缩器
24或液压伸缩器24;本实施例中采用气动伸缩器24,包括与气源连接的气缸241和与气缸241伸缩连接的气动推杆242;气缸241固定于机架,气动推杆242与换道拨件23铰接;气缸241与气源之间的进气和回气管路上设有电磁阀243,控制器9与电磁阀243电连接以控制气动推杆242的伸缩。
59.双通道输送机构3包括两个并行的通道,各通道均设有第四传送带31。第四传送带31为小节距滚珠网带输送,两个第四传送带31分别由两个第四电机32单独控制,有效控制两道产品堆积压力;网带节距小,可避免产品转向,网带上覆有滚珠,避免产品堆积过程中产品擦伤。
60.第一传感器4固定在机架上且位于第一传送带11的尾端,当第一传送带11尾端经过或有产品时,生成第一类电信号;第二传感器5固定在机架上且位于第二传送带12的尾端,当第二传送带12尾端经过或有产品时,生成第二类电信号;第三传感器6固定在机架上且位于第三传送带21的上方,当第三传送带21上经过或有产品时,生成第三类电信号。其中,第一传感器4、第二传感器5均为漫反射光电传感器,第三传感器6为镜反射传感器。
61.控制器9与第一传感器4、第一电机13、第二传感器5、第二电机14、伸缩器24、第三传感器6、第三电机22、报警器8以及急停开关7电连接,控制器9基于第一类电信号、第二类电信号以控制第一电机13的启停,基于第二类电信号以控制第二电机14的启停以及伸缩器24的伸缩,基于第三类电信号以控制第三电机22的启停、报警器8报警、急停开关7断电。
62.为了方便介绍逻辑控制关系,按照从左到右的顺序,将四个第一传送带11分别用代号a1、a2、a3、a4表示,将四个第二传送带12分别用代号b1、b2、b3、b4表示,四个第一传送带11上方的四个第一传感器4分别用代号c1、c2、c3、c4表示,四个第二传送带12上方的四个第二传感器5别用代号d1、d2、d3、d4表示;a1、a2、a3、a4转运时分别向b1、b2、b3、b4运送产品,b1、b2、b3、b4运转时均向第三传送带21运送产品;a1、a2、b1、b2属于左道,a3、a4、b3、b4属于右道。当换道拨件23的前端在左道时,控制器9基于d1和d2的电信号开始计数,当数量达到设定值时,延时一端时间后(该时间内第三传送带21上的产品运到第四传送带31),控制器9控制伸缩器24动作,推动或拉动换道拨件23,使换道拨件23的前端切换到右道;同时a1、a2、b1、b2进行补货,d1、d2分别再次发送电信号给控制器9后,控制器9分别控制b1、b2停止工作,之后控制器9分别接到c1、c2的电信号,则控制器9分别控制a1、a2停止工作。右道的控制逻辑与左道相同,不再赘述。
63.当处理器基于第三传感器6的第三类电信号,判断两产品间距小于正常间距阈值时,判定为“卡包”状态,此时控制控制急停开关7关闭,切断各电机的供电,同时控制报警器8发出报警,如声音报警或闪光报警。产品间距是是根据相邻两个第三类电信号的时间差判断的,产品间距阈值对应控制器9内预设的时间差阈值,时间差小于时间差阈值,则产品间距小于产品间距阈值。
64.实施例2
65.实施例2提供了一种饮品后道二次包装线上的合流机构的智能控制方法,基于实施例1提供的合流机构实现的,包括换道控制方法、补货控制方法和卡包急停报警方法。
66.所述换道控制方法包括如下步骤:
67.步骤s11,换道拨件的前端位于一侧的两通道之间,位于该侧的两个第二传送带转动以向前输送产品,位于该侧的两个第二传感器连续生成并发送第二类电信号,控制器接
收该侧的两个第二传感器发送的第二类电信号并计数;
68.步骤s12,当计数数值等于预设的数量阈值时,控制器控制该侧的两个第二电机停止转动;经过预设时间t后,控制器控制伸缩器伸或缩,使换道拨件的前端从该侧的两通道之间换到另一侧的两通道之间;
69.步骤s13,换道完成后,控制器控制另一侧的两个第二电机启动以带动该侧两个第二传送带向前输送产品;同时,该侧的两个第二传感器连续生成并发送第二类电信号,控制器接收该侧的两个第二传感器发送的第二类电信号并计数;
70.重复执行步骤s12和s13。
71.例如:当换道拨件的前端在左道时,控制器基于d1和d2的电信号开始计数,当数量达到设定值时,延时一端时间后(该时间内第三传送带上的产品运到第四传送带),控制器控制伸缩器动作,推动或拉动换道拨件,使换道拨件的前端切换到右道;右道的控制逻辑与左道相同,不再赘述。
72.补货控制方法包括如下步骤:
73.步骤s21,控制器控制换道拨件开始换道时,控制器收到当前侧的两个第二传感器分别发送的第一个第一类电信号后,则控制器分别控制该通道的第二电机停止转动,完成第二传送带的补货;
74.步骤s22,第二传送带补货完成后,该侧控制器分别接收到该侧第一传感器发送的第一个第一类电信号后,分别控制该通道的第一电机停止转动,完成第一传送带的补货。
75.例如:换道拨件的前端在左道,计数满足要求后换道刚刚开始(延时换道,时间为t),此时a1、a2、b1、b2进行补货;d1再次发送第二类电信号给控制器,意味着此时b1尾端已有产品,b1补货完成,控制器自收到d1的第一个第二类电信号后立即控制b1的第二电机停止工作;b2的补货方法和b1的一致。b1停后,控制器接到c1的第一个第一类电信号,表示a1尾部已有产品,此时a1补货完成,控制器自收到c1的第一个第一类电信号后立即控制a1的第一电机停止工作;a2的补货方式与a1相同。此为左道补货,当右道补货时,其方式与左道相同。
76.卡包急停报警方法包括如下步骤:
77.步骤s31,第三传感器连续生成并发送第三类电信号,控制器接收第三传感器发送的第三类电信号;
78.步骤s32,计算两个相邻第三类电信号之间的时间差,当时间差小于预设时间差阈值时,则判定为“卡包”状态,此时控制器控制急停开关关闭,切断各电机的供电,同时控制器控制报警器发出报警。报警后工作人员及时处理,之后按下复位键,设备继续运转。
79.实施例1提供的合流机构和实施例2提供的智能控制方法是相辅相成的,实施例1的合流机构的结构设计是基础,实施例2的控制方法是基于实施例1的结构实现的。通过控制器和传感器,可自动计数并智能换道,合流分配更智能化、更合理,避免通道拥堵;卡包自动停机并报警,及时排除故障;差速拉开产品,便于计数且有助规避卡包;包胶辊可降低碰撞能量,避免磕碰而损坏产品;小节距滚珠网带输送,网带节距小,可避免产品转向,网带上覆有滚珠,避免产品堆积过程中产品擦伤。
80.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,
在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1