一种自动落饼干系统的制作方法
1.本发明涉及生产三明治类冰淇淋的设备技术领域,具体涉及一种自动落饼干系统。
背景技术:
2.三明治冰淇淋类型产品原有的生产模式是人工摆放饼干,存在的问题是用人较多,人工成本高,手工环节不利于产品微生物的控制。另外,人工摆放饼干存在误差,很容易出现三明治产品上下层的饼干没法对齐、对正的现象,造成不合格品,没法保障产品质量。
3.对此,现有技术中也有采用自动落饼干的设备,其方案大都采用自由落体的方式,即,推板将饼干推至指定位置,然后抽板打开,饼干以自由落体的方式落在产品表面,由于饼干重量轻,自由落体的方式仍然会存在偏差,仍然会有部分产品的饼干不能对齐、对正。
4.因此,如何提供一种能使三明治冰淇淋类型的产品上下层饼干实现完全对齐、对正以提升产品质量和产品出成率的设备便成为了本领域技术人员急需解决的技术问题。
技术实现要素:
5.为实现上述目的,本发明提供一种能使三明治冰淇淋类型的产品上下层饼干实现完全对齐、对正以提升产品质量和产品出成率的设备,具体技术方案如下:
6.一种自动落饼干系统,包括:
7.操作台,所述操作台设置于一输送装置的上方,所述输送装置用于输送待放饼干的物品,输送时若干所述待放饼干的物品沿垂直于所述输送装置的输送方向布置为若干排,每排包括若干所述待放饼干的物品,所述操作台具有分布在其上下两侧的上表面和下表面,所述下表面朝向所述输送装置,所述操作台上开设有贯通所述上表面和下表面的若干定位槽,若干所述定位槽沿垂直于所述输送装置的输送方向呈一排分布,该一排分布的若干所述定位槽能够一一对应所述输送装置上所输送的沿每一排布置的若干所述待放饼干的物品,所述定位槽内用于放置饼干;
8.移动挡板和驱动所述移动挡板移动的第一动力部,所述移动挡板移动设置于所述操作台上,所述移动挡板具有封闭位置和开放位置,所述移动挡板位于封闭位置时其能够使得饼干位于所述定位槽内,所述移动挡板位于开放位置时,所述饼干从所述定位槽掉落至输送装置上所对应的所述待放饼干的物品的上方,所述移动挡板位于封闭位置时,所述移动挡板至所述定位槽于所述上表面的开口处的高度不大于一个所述饼干的厚度;
9.饼干输送部,其包括第二动力部,所述第二动力部提供动力使得所述饼干输送部用于将饼干输送至所述定位槽;
10.移送饼干部,其包括第三动力部和若干吸盘和连通若干所述吸盘的抽真空装置,所述若干吸盘沿垂直于所述输送装置的输送方向呈一排分布,并若干所述吸盘能够一一对应所述操作台上沿一排分布的若干所述定位槽,所述第三动力部连接若干所述吸盘能够驱动所述吸盘移动,所述抽真空装置连接若干所述吸盘能够进行抽真空操作使得所述吸盘产
生吸力;
11.plc控制器,所述plc控制器电连接所述第一动力部、第二动力部、第三动力部和抽真空装置。
12.作为优选,所述第二动力部为第二气缸,所述饼干输送部包括移动板,所述移动板滑动设置于所述操作台上且滑动方向为远离或靠近所述定位槽的方向,所述移动板连接所述第二气缸的活塞使得被第二气缸驱动,所述移动板靠近沿一排分布的若干所述定位槽的位置处开设有一一对应所述定位槽的若干饼干放置通槽,所述饼干放置通槽远离所述定位槽时,放置于所述饼干放置通槽中的若干饼干被所述操作台的上表面支撑,所述饼干放置通槽移动至所述定位槽上方时,一个所述饼干能够从所述饼干放置通槽下落到所述定位槽内,所述第二气缸配置有电连接所述plc控制器的磁性开关。
13.作为优选,每个所述饼干放置通槽的上方设置有一沿竖直方向向上并远离所述移动板的承载体,所述承载体内具有沿竖直方向连通所述饼干放置通槽的通道,供放置若干饼干。
14.作为优选,所述第二气缸的数量相同于所述饼干放置通槽的数量,若干所述第二气缸同步动作,对应每个所述饼干放置通槽的所述移动板的位置处连接一个所述第二气缸。
15.作为优选,所述第三动力部包括吸盘横移气缸、吸盘导杆气缸和吸盘架气缸,所述移送饼干部包括横移板,所述横移板位于所述操作台的上方并所述横移板连接所述吸盘横移气缸的活塞,所述吸盘横移气缸的活塞能够带动所述横移板沿远离或靠近所述定位槽的方向移动,所述横移板上设置有吸盘架,所述吸盘架连接所述吸盘架气缸的活塞使得能够带动所述吸盘架沿竖直方向移动进而靠近或远离所述定位槽,所述吸盘架上朝向所述定位槽的位置处设置呈一排分布的吸盘导杆,所述吸盘导杆连接所述吸盘导杆气缸的活塞,使得所述吸盘导杆相对于所述吸盘架能够沿靠近或远离所述定位槽的方向移动,每个所述吸盘导杆靠近所述定位槽的一端固定连接一吸盘,所述吸盘架靠近所述定位槽时所述吸盘能够吸附位于所述定位槽内的饼干,之后吸附饼干的所述吸盘被所述吸盘导杆引导将其放置于所述输送装置上的待放饼干的物品上。
16.作为优选,所述横移板上开设一排插接孔,所述吸盘架包括一支撑板,所述支撑板上开设有对应一排所述插接孔的连通孔,所述支撑板位于所述横移板下方并连接所述吸盘架气缸的活塞,每个所述连通孔均固定连接一沿竖直方向设置的导向杆,所述导向杆的自由端穿过所述插接口,每个所述导向杆内插接有一个相对于所述导向杆能够移动的所述吸盘导杆。
17.作为优选,所述吸盘导杆气缸的数量相同于所述吸盘的数量,且若干所述吸盘导杆气缸同步动作。
18.作为优选,所述第一动力部为第一气缸,所述第一气缸的活塞连接所述移动挡板,所述操作台内开设有连通至所述定位槽的导轨,所述移动挡板移动设置于所述导轨内,所述第一气缸配置有电连接所述plc控制器的磁性开关。
19.作为优选,所述抽真空设备为具有正向工作能产生吸力和反向工作能产生推力的真空发生器。
20.作为优选,所述操作台上固定架设有导轨,所述横移板滑动设置于所述导轨上。
21.本发明提供的自动落饼干系统,具有如下技术效果:
22.该系统在工作时,饼干输送部将饼干输送至定位槽,随后移送饼干部上的吸盘能够将饼干吸附,并移动挡板移动至开放位置,随后移送饼干部控制吸附有饼干的吸盘穿过定位槽,进而将饼干扣在冰淇淋表面,整个动作中,通过吸盘等的设置,饼干不发生任何水平位移,所以可以保证饼干落位的精准度,可以使饼干和冰淇淋正向对齐、对正。该系统采用plc控制,每个动作受程序控制,互不干涉,且自动控制程序设置有动作保护,第一个动作完成之后,下一步动作才能开始,互不干涉。
23.作为优选,设置移动板并其上开设饼干放置通槽,进而能够通过移动板移动到一定位置时,能使得位于饼干放置通槽的饼干下落到操作台的定位槽内。
24.作为优选,设置承载体,能够放置多个饼干,提高处理量。
25.作为优选,若干第二气缸同步动作,以保证提高充足的动力。
26.作为优选,设置吸盘架和相应的气缸,为此能够通过驱动吸盘架移动进而使得位于吸盘架上的吸盘能靠近饼干,此时,控制抽真空设备使得吸盘产生吸附力,并该距离的靠近使得较小的吸附力即可将饼干吸附,进而再通过吸盘导杆驱动,以将饼干直接引导放置在待放饼干的物品上。
27.作为优选,抽真空设备还可以进行反向工作,即将饼干放置在待放饼干的物品上后,进行该反向工作,为此产生推力,以将饼干扣在冰淇淋表面;而且反向工作可以避免饼干碎渣子堵塞吸盘。
附图说明
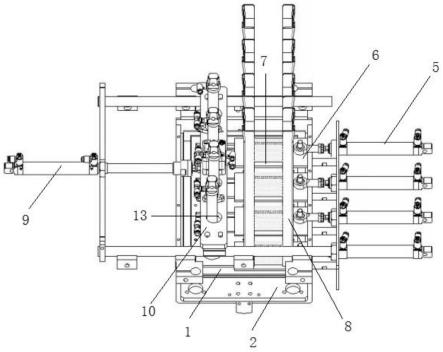
28.图1为本发明所提供的一种自动落饼干系统的一种具体实施方式的结构示意图;
29.图2为图1的部分部件的结构示意图;
30.图3为图1的俯视图;
31.图4为沿图1的左侧视角的示意图。
32.图1-4中附图标记如下:
33.1操作台,2输送装置,3定位槽,4移动挡板,5第二气缸,6移动板,7饼干放置通槽,8承载体,9吸盘横移气缸,10横移板,11吸盘导杆,12吸盘,13插接孔。
具体实施方式
34.如图1-4所示,图1为本发明所提供的一种自动落饼干系统的一种具体实施方式的结构示意图;图2为图1的部分部件的结构示意图;图3为图1的俯视图;图4为沿图1的左侧视角的示意图。
35.结合图1-4,本发明提供一种自动落饼干系统,包括:
36.操作台1,所述操作台1设置于一输送装置2的上方,所述输送装置2用于输送待放饼干的物品,输送时若干所述待放饼干的物品沿垂直于所述输送装置2的输送方向布置为若干排,每排包括若干所述待放饼干的物品,所述操作台1具有分布在其上下两侧的上表面和下表面,所述下表面朝向所述输送装置2,所述操作台1上开设有贯通所述上表面和下表面的若干定位槽3,若干所述定位槽3沿垂直于所述输送装置2的输送方向呈一排分布,该一排分布的若干所述定位槽3能够一一对应所述输送装置2上所输送的沿每一排布置的若干
所述待放饼干的物品,所述定位槽3内用于放置饼干;
37.移动挡板4和驱动所述移动挡板4移动的第一动力部,所述移动挡板4移动设置于所述操作台1上,所述移动挡板4具有封闭位置和开放位置,所述移动挡板4位于封闭位置时其能够使得饼干位于所述定位槽3内,所述移动挡板4位于开放位置时,所述饼干从所述定位槽3掉落至输送装置2上所对应的所述待放饼干的物品的上方,所述移动挡板4位于封闭位置时,所述移动挡板4至所述定位槽3于所述上表面的开口处的高度不大于一个所述饼干的厚度;
38.饼干输送部,其包括第二动力部,所述第二动力部提供动力使得所述饼干输送部用于将饼干输送至所述定位槽3;
39.移送饼干部,其包括第三动力部和若干吸盘12和连通若干所述吸盘12的抽真空装置,所述若干吸盘12沿垂直于所述输送装置2的输送方向呈一排分布,并若干所述吸盘12能够一一对应所述操作台1上沿一排分布的若干所述定位槽3,所述第三动力部连接若干所述吸盘12能够驱动所述吸盘12移动,所述抽真空装置连接若干所述吸盘12能够进行抽真空操作使得所述吸盘12产生吸力;
40.plc控制器,所述plc控制器电连接所述第一动力部、第二动力部、第三动力部和抽真空装置。
41.该系统在工作时,饼干输送部将饼干输送至定位槽3,随后移送饼干部上的吸盘12能够将饼干吸附,并移动挡板4移动至开放位置,随后移送饼干部控制吸附有饼干的吸盘12穿过定位槽3,进而将饼干扣在如冰淇淋的表面,整个动作中,通过吸盘12等的设置,饼干不发生任何水平位移,所以可以保证饼干落位的精准度,可以使饼干和冰淇淋正向对齐、对正。该系统采用plc控制,每个动作受程序控制,互不干涉,且自动控制程序设置有动作保护,第一个动作完成之后,下一步动作才能开始,互不干涉。
42.一种具体实施方式中,如图1-4所示,所述第二动力部为第二气缸5,所述饼干输送部包括移动板6,所述移动板6滑动设置于所述操作台1上且滑动方向为远离或靠近所述定位槽3的方向,所述移动板6连接所述第二气缸5的活塞使得被第二气缸5驱动,所述移动板6靠近沿一排分布的若干所述定位槽3的位置处开设有一一对应所述定位槽3的若干饼干放置通槽7,所述饼干放置通槽7远离所述定位槽3时,放置于所述饼干放置通槽7中的若干饼干被所述操作台1的上表面支撑,所述饼干放置通槽7移动至所述定位槽3上方时,一个所述饼干能够从所述饼干放置通槽7下落到所述定位槽3内,所述第二气缸5配置有电连接所述plc控制器的磁性开关。
43.设置移动板6并其上开设饼干放置通槽7,进而能够通过移动板6移动到一定位置时,能使得位于饼干放置通槽7的饼干下落到操作台的定位槽3内。
44.如图1和图4所示,每个所述饼干放置通槽7的上方设置有一沿竖直方向向上并远离所述移动板6的承载体8,所述承载体8内具有沿竖直方向连通所述饼干放置通槽7的通道,供放置若干饼干。
45.设置承载体8,能够放置多个饼干,提高处理量。
46.承载体8的高度可以容纳100片饼干叠放,饼干自身的重量可以将最下层的饼干压紧,以便于移动板将饼干顺利推至定位槽3内。
47.该具体实施方式中,所述第二气缸5的数量相同于所述饼干放置通槽7的数量,若
干所述第二气缸5同步动作,对应每个所述饼干放置通槽7的所述移动板6的位置处连接一个所述第二气缸5。
48.若干第二气缸5同步动作,以保证提高充足的动力。
49.该具体实施方式中,如图1-4所示,所述第三动力部包括吸盘横移气缸9、吸盘导杆气缸和吸盘架气缸,所述移送饼干部包括横移板10,所述横移板10位于所述操作台1的上方并所述横移板10连接所述吸盘横移气缸9的活塞,所述吸盘横移气缸9的活塞能够带动所述横移板10沿远离或靠近所述定位槽3的方向移动,所述横移板10上设置有吸盘架,所述吸盘架连接所述吸盘架气缸的活塞使得能够带动所述吸盘架沿竖直方向移动进而靠近或远离所述定位槽3,所述吸盘架上朝向所述定位槽3的位置处设置呈一排分布的吸盘导杆11,所述吸盘导杆11连接所述吸盘导杆气缸的活塞,使得所述吸盘导杆11相对于所述吸盘架能够沿靠近或远离所述定位槽3的方向移动,每个所述吸盘导杆11靠近所述定位槽3的一端固定连接一吸盘12,所述吸盘架靠近所述定位槽3时所述吸盘12能够吸附位于所述定位槽3内的饼干,之后吸附饼干的所述吸盘12被所述吸盘导杆11引导将其放置于所述输送装置2上的待放饼干的物品上,例如冰淇淋上。
50.设置吸盘架和相应的气缸,为此能够通过驱动吸盘架移动进而使得位于吸盘架上的吸盘12能靠近饼干,此时,控制抽真空装置使得吸盘12产生吸附力,并该距离的靠近使得较小的吸附力即可将饼干吸附,进而再通过吸盘导杆11驱动,以将饼干直接引导放置在待放饼干的物品上。
51.具体的,如图1-4所示,所述横移板10上开设一排插接孔13,所述吸盘架包括一支撑板,所述支撑板上开设有对应一排所述插接孔13的连通孔,所述支撑板位于所述横移板10下方并连接所述吸盘架气缸的活塞,每个所述连通孔均固定连接一沿竖直方向设置的导向杆,所述导向杆的自由端穿过所述插接口,每个所述导向杆内插接有一个相对于所述导向杆能够移动的所述吸盘导杆11。
52.该待放饼干的物品为冰淇淋,操作过程中,吸盘12将饼干吸附时,定位槽3正对输送装置2上的冰淇淋,吸盘导杆气缸引导吸盘12将垂直向下运动,将饼干扣在冰淇淋表面,整个动作不发生任何水平位移,所以可以保证饼干落位的精准度,可以使饼干和冰淇淋正向对齐、对正。
53.所述吸盘导杆气缸的数量相同于所述吸盘12的数量,且若干所述吸盘导杆气缸同步动作。
54.一种具体实施方式中,所述第一动力部为第一气缸,所述第一气缸的活塞连接所述移动挡板4,所述操作台1内开设有连通至所述定位槽3的导轨,所述移动挡板4移动设置于所述导轨内,所述第一气缸配置有电连接所述plc控制器的磁性开关。
55.一种具体实施方式中,所述抽真空设备为具有正向工作能产生吸力和反向工作能产生推力的真空发生器。真空发生器的型号为festo vn-10-h-t3-pq2-vq2-ro1-m 532636费斯托真空发生器。
56.抽真空设备还可以进行反向工作,即将饼干放置在待放饼干的物品上后,进行该反向工作,为此产生推力,以将饼干扣在冰淇淋表面;而且反向工作可以避免饼干碎渣子堵塞吸盘。
57.一种具体实施方式中,所述操作台1上固定架设有导轨,所述横移板10滑动设置于
所述导轨上。
58.该系统大致的工作过程如下:饼干平放在移动板6的饼干放置通槽7内,第二气缸5推动移动板6向左运动,即朝向操作台1上的定位槽3的方向,将饼干推至定位槽3内,然后第二气缸5带动移动板6向右运动,回到原位;之后,吸盘横移气缸9带动横移板10向靠近定位槽3方向移动,吸盘12对准定位槽3后,吸盘架向下移动,抽真空设备工作使得吸盘12产生吸附力将饼干吸附,之后,移动挡板4处于开放位置,此时吸盘导杆11带动吸附饼干的吸盘12向下移动,以将饼干放置在待放饼干的物品上,随后回到原位,移动挡板4关闭,整套落饼干动作完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1