一种操作机构可调的前移式叉车及其控制方法与流程
1.本发明涉及叉车技术领域,尤其是涉及一种操作机构可调的前移式叉车及其控制方法。
背景技术:
2.现有前移式叉车的操作机构包括加速器和控制器,所述操作机构都采用固定角度的方式,操作角度不能调节,驾驶员根据自己需求只能通过调整座椅的前后尺寸来适应加速器和控制器的角度,应用范围受限,长时间操作容易造成驾驶员脚部疲劳。因无法调节座椅前后移动,驾驶员上下车不方便,且人机工程不舒适。
3.例如,中国专利公开号cn106672864a,公开日2017年05月17日,名为“一种坐驾式前移式叉车”,包括:车体;车体上端设有上盖,前端对称的设有导轨车腿,中部设有电池托架,后端右侧设有后门,后端左侧从前往后依次设有加速器、脚刹总成和脚踏开关;导轨车腿前端设有负载轮;负载轮内部设有液压制动器;导轨车腿间设有起升系统;电池托架上设有蓄电池;后门包括:上端面板、左侧面板和后端面板;车体上位于后门内设有驱动系统和液压系统;上端面板上设有座椅;上盖左侧从后往前依次设有方向盘组件、仪表;所述上盖位于仪表的下方设有钥匙开关;上盖前端从左往右依次设有大灯开关、手柄组合、手臂托垫和置物框。
4.现有专利存在的缺点是:现有前移式叉车的加速器和控制器都采用固定角度的方式,操作角度不能调节,应用范围受限,长时间操作易造成驾驶员脚部疲劳。对于操作空间受限的前移式,因无法调节座椅的前后,驾驶员上下车不方便,驾驶员脚部操作不舒适,不能长时间工作。
技术实现要素:
5.本发明的目的是为了解决现有前移式叉车的加速器和控制器都采用固定角度的方式,操作角度不能调节,应用范围受限,长时间操作易造成驾驶员脚部疲劳的问题,提供一种操作机构可调的前移式叉车及其控制方法,实现前移式叉车操作机构调节及安全控制,提高驾驶员操作舒适度和高速安全性。
6.为了实现上述目的,本发明采用以下技术方案:一种操作机构可调的前移式叉车,包括:车体;座椅,所述座椅设置在车体上,所述座椅上设有重量传感器;操作机构,所述操作机构包括设置在车体上的加速器和制动器;调节机构,所述调节机构包括转动设置在车体上的电推杆、固定在座椅前端的固定座以及转动设置在所述固定座上的支撑板,所述电推杆的输出端与支撑板转动连接,所述电推杆驱动支撑板转动,所述操作机构位于所述支撑板上。本方案中通过调节机构调节加速器和制动器的角度,控制器根据驾驶员的身高体重,控制电推杆自动调节支撑板的旋
转角度,使得加速器和制动器的角度适应不同的驾驶员。在行驶高速过程中,对于特殊工况导致整车晃动大时,自动降速,提高安全性。解决了现有叉车中存在的三个问题:(1)需要通过前后移动座椅位置来适应不同体型的驾驶员,操作机构角度固定,不能调节,应用范围受限,人机工程不舒适,长时间操纵时间造成驾驶员脚部疲劳的问题;(2)对于操作空间受限的前移式,因无法调节座椅的前后,驾驶员上下车不方便,驾驶员脚部操作不舒适,不能长时间工作的问题;(3)现有前移式高速行时,遇到突发工况,易发生安全事故的问题。
7.作为优选,还包括控制器,所述控制器控制电推杆推出或缩回,所述重量传感器与所述控制器连接。
8.作为优选,所述调节机构还包括设置在车体上的固定旋转座,所述电推杆通过固定旋转座转动设置在车体上。
9.作为优选,所述调节机构还包括设置在支撑板上的角度传感器,所述角度传感器与控制器连接。操作机构角度调节引入角度传感器,用于判断调节机构的角度范围。
10.作为优选,所述车体上设有上盖,所述上盖上设有安全开关、角度调节按钮,所述安全开关、角度调节按钮均与所述控制器连接。
11.作为优选,所述车体上设有上车扶手,所述上车扶手上设有扶手开关。
12.作为优选,电推杆呈初始状态时,所述支撑板水平放置;当电推杆推出时,所述电推杆位于所述座椅前侧,所述电推杆驱动支撑板朝向座椅转动。
13.一种如上所述的操作机构可调的前移式叉车的控制方法,包括如下步骤:步骤一:驾驶者按扶手开关k1,电推杆缩回,支撑板呈水平状态,方便驾驶员上车,上车坐在座椅上,打开安全开关k2;步骤二:控制器检测行驶速度v为0km/h后,控制器检测座椅上重量传感器的信号值v1、角度传感器的信号值v0,控制器根据座椅下方的重量传感器信号以及支撑板上的角度传感器信号,驱动电推杆进行调节操作机构的角度,操作机构的角度调节的大小由角度传感器反馈给控制器,控制器根据反馈的信号用于判断调整是否到位:v0《v1时,电推杆推出;v0》v1时,电推杆缩回;v0=v1时,电推杆停止,角度调整到位。
14.作为优选,所述步骤二中,行车过程中,控制器检测行车速度大于10km/h时,控制器检测重量传感器信号值v1的变化范围,v1的变化范围大于2v时,降低叉车行驶速度,v1的变化范围小于等于2v时,叉车保持正常行驶速度。提高驾驶员高速安全性。
15.作为优选,所述步骤一中,检测器检测到安全开关关闭后,电推杆缩回,支撑板呈水平状态。方便驾驶员下车。
16.因此,本发明具有如下有益效果:实现踏板机构自动调节角度的功能,方便驾驶员上下车,同时提高驾驶员操作舒适度和高速安全性。
附图说明
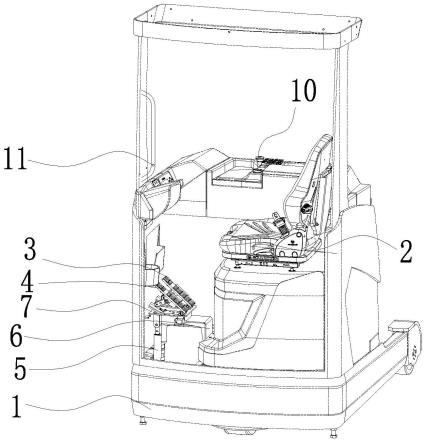
17.图1是本发明实施例一的一种结构示意图。
18.图2是本发明中操作机构和调节机构位于车体上的一种结构示意图。
19.图3是本发明中操作机构和调节机构的一种结构示意图。
20.图4是本发明中操作机构和调节机构的另一种结构示意图。
21.图5是本发明实施例二中上下车过程中叉车控制的流程图。
22.图6是本发明实施例二中行车过程中叉车控制的流程图。
23.图7是本发明中叉车的控制系统的框图。
24.如图:车体1、座椅2、加速器3、制动器4、电推杆5、固定座6、支撑板7、固定旋转座8、角度传感器9、角度调节按钮10、扶手开关11。
具体实施方式
25.为使本发明技术方案实施例目的、技术方案和优点更加清楚,下面结合附图与具体实施方式对本发明做进一步的描述。
26.实施例一,如图1至4所示的一种操作机构可调的前移式叉车,包括:车体1;座椅2,所述座椅2设置在车体1上,所述座椅2上设有重量传感器;操作机构,所述操作机构包括设置在车体1上的加速器3和制动器4;调节机构,所述调节机构包括转动设置在车体1上的电推杆5、固定在座椅2前端的固定座6以及转动设置在所述固定座6上的支撑板7,所述电推杆5的输出端与支撑板7转动连接,所述电推杆5驱动支撑板7转动,所述操作机构位于所述支撑板7上。本方案中通过调节机构调节加速器3和制动器4的角度,控制器根据驾驶员的身高体重,控制电推杆5自动调节支撑板7的旋转角度,使得加速器3和制动器4的角度适应不同的驾驶员。在高速行驶过程中,对于特殊工况导致整车晃动大时,自动降速,提高高速安全性。解决了现有叉车中需要通过前后移动座椅2位置来适应不同体型的驾驶员,应用范围受限,人机工程不舒适,长时间操纵时间造成驾驶员脚部疲劳的问题,以及部分窄体车型空间小,没有座椅2前后调节的空间,驾驶员上下车不方便和操作不舒适的问题。
27.还包括控制器,所述控制器控制电推杆5推出或缩回,所述重量传感器与所述控制器连接。
28.如图1、图2、图3所示,所述调节机构还包括设置在车体1上的固定旋转座8,所述电推杆5通过固定旋转座8转动设置在车体1上。所述调节机构还包括设置在支撑板7上的角度传感器9,所述角度传感器9与控制器连接。操作机构角度调节引入角度传感器9,用于判断调节机构的角度范围。
29.如图1所示,所述车体1上设有上盖,所述上盖上设有安全开关、角度调节按钮10,所述安全开关、角度调节按钮10均与所述控制器连接。所述车体1上设有上车扶手,所述上车扶手上设有扶手开关11。该扶手开关11用于开闭电推杆5与控制器的电路,控制系统采用蓄电池供电,解决了驾驶员在断电的情况下,上下车角度不能调节的问题。同时有个角度调节按扭为人工手动调节,对于自动调节不适应,仍需要调节的人进行人工调节。
30.如图2所示,电推杆5呈初始状态时,所述支撑板7水平放置;当电推杆5推出时,所述电推杆5位于所述座椅2前侧,所述电推杆5驱动支撑板7朝向座椅2转动。
31.实施例二,如图1至7所示的一种操作机构可调的前移式叉车的控制方法,包括如下步骤:步骤一:驾驶者按扶手开关11k1,电推杆缩回,支撑板呈水平状态,方便驾驶员上
车,上车坐在座椅2上,打开安全开关k2;步骤二:控制器检测行驶速度v为0km/h后,控制器检测座椅2上重量传感器的信号值v1、角度传感器9的信号值v0,控制器根据座椅2下方的重量传感器信号以及支撑板7上的角度传感器9信号,驱动电推杆5进行调节操作机构的角度,操作机构的角度调节的大小由角度传感器9反馈给控制器,控制器根据反馈的信号用于判断调整是否到位:v0《v1时,电推杆5推出;v0》v1时,电推杆5缩回;v0=v1时,电推杆5停止,角度调整到位。
32.所述步骤二中,行车过程中,控制器检测行车速度大于10km/h时,控制器检测重量传感器信号值v1的变化范围,v1的变化范围大于2v时,降低叉车行驶速度,v1的变化范围小于等于2v时,叉车保持正常行驶速度。
33.所述步骤一中,检测器检测到安全开关关闭后,电推杆5缩回,支撑板7呈水平状态,方便驾驶员下车。
34.座椅2下方的重量传感器信号处理:重量传感器由重力转化成电信号:0-5v,60kg-100kg,取中间值80kg对应电信号2.5v;电推杆5的行程:0-100mm,中位值:50mm,往下推50mm,往回缩50mm;角度传感器9信号:0-5v,中位值:2.5v ,对应旋转角度:0-30度;中位值:0度对应2.5v,0-2.5v:左转15度(缩回);2.5-5v:右转15度(伸出)。
35.最终的关系:60~80kg 对应重量传感器:0-2.5v,对应角度传感器9:5-2.5v;80kg~100kg对应重量传感器:2.5v-5v,对应角度传感器9:2.5-0v。
36.控制逻辑:控制器检测重力传感器信号,角度传感器9信号,根据角度传感器9信号判断控制电推杆5往上推(伸出)或下缩(缩回),根据重力传感器信号,用于判断控制是否到位。
37.举例一:90kg驾驶员1)开机后,k2=1且v=0,控制器检测到重力信号:3.75v, 所对应的角度传感器9信号:1.25v,检测到角度传感器9信号:1v,1v《1.25v,控制电推杆5伸出,直到角度传感器9电压值为1.25v后,停止电推杆5上升,旋转到位。
38.2)开机后,k2=1且v=0,控制器检测到重力信号:3.75v,所对应的角度传感器9信号:1.25v,检测到角度传感器9信号3v,3v》1.25v,控制电推杆5缩回,直到角度传感器9电压值为1.25v后,停止电推杆5缩回,旋转到位。
39.举例二:70kg驾驶员1)开机后,k2=1且v=0,控制检测到重力信号:1.25v, 所对应的角度传感器9信号:3.75v,检测到角度传感器9信号:1v,1v《3.75v,控制电推杆5伸出,直到角度传感器9电压值为3.75v后,停止电推杆5上升,旋转到位。
40.2)开机后,k2=1且v=0,控制检测到重力信号:1.25v, 所对应的角度传感器9信号:
3.75v,检测到角度传感器9信号:4v,4v》3.75v,控制电推杆5缩回,直到角度传感器9电压值为3.75v后,停止电推杆5缩回,旋转到位。
41.车辆行驶过程中的安全控制原理:当车速度大于v1时,v1可以取任何值,控制器时时监测重量传感器单位时间内的变化值 (取绝对值),比如0-3秒内的变化值,0秒时检测到传感器值为n1,3秒后检测到传感器值为n2,n=n2-n1取绝对值,当n》2v(此值可以修改)时,降低车辆的行驶速度。
42.手动角度微调原理:控制器根据角度调节开关给的信号,控制电推杆5推出和缩回,检测到角度传感的极限位置时(0v和5v时),停止电推杆5输出。角度调节开关有三个位置(可复位),开关往前按,电推杆5缩回,开关往后按,电推杆5伸出。
43.以上所述之具体实施例仅为本发明较佳的实施方式,并非以此限定本发明的具体实施范围。凡依照本发明之形状、结构所作的等效变化理应均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1