一种tray盘上料装置的制作方法
1.本发明涉及自动上料技术领域,尤其是涉及一种tray盘上料装置。
背景技术:
2.tray盘被广泛的应用于电子产品的自动化生产中,特别是自动化生产线的上料或下料阶段。tray盘一般由硬质塑料注塑而成,其上设置若干凹槽用来承载电子元件从而在自动化生产线上进行流转。另外,tray盘可以通过tray盘本身的型腔叠放在一起,叠放后占用的空间小,单位体积承载电子元件较多,可以满足自动化及大批量的生产需求。
3.在上料阶段,操作人员将若干叠起的盛满电子元件的tray盘投入设备中,搬运机构将tray盘内的电子元件搬运到后续工位,当一个tray盘内的电子元件被搬运完以后,就需要对空tray盘进行转移、叠放并运出生产线。在下料阶段,搬运机构需要将来自上游的电子元件放入空的tray盘内,当空tray盘装满后,需要对满tray盘进行叠放并运出生产线。
4.目前tray盘的上下料装置结构较复杂,且各部件动作衔接不够流畅,因此动作节拍较慢,上下料效率较低;另外,目前的上下料装置中用于码垛tray盘的码垛装置中夹持气缸的行程较小,因此对不同尺寸范围的tray盘的兼容性较差。
技术实现要素:
5.本发明的主要目的在于提供一种tray盘上料装置,以解决上述技术问题,结构简单、上料效率高。
6.为实现上述目的,本发明采用如下技术方案:
7.一种tray盘上料装置,包括有上料机构、运输机构、升降机构和储存机构,所述运输机构设置有两个,装有物料的tray盘储存于所述上料机构,所述上料机构将装有物料的tray盘上料至其一运输机构,所述运输机构将装有物料的tray盘上料移动至指定位置,搬运机构将物料搬运至后续工位,所述运输机构将空的tray盘移动至所述升降机构,所述升降机构将空的tray盘移动至另一运输机构,所述运输机构将空的tray盘运输至所述储存机构,所述储存机构将空的tray盘进行堆叠存放。
8.作为一种优选的技术方案,所述上料机构包括有抬升组件、支撑组件和储料支架,所述抬升组件安装于所述储料支架的下方,所述支撑组件设置于所述储料支架的两侧。
9.作为一种优选的技术方案,所述抬升组件包括有抬升基板、抬升活动板、抬升推板、第一抬升气缸和第二抬升气缸,所述第一抬升气缸安装于所述抬升基板上,所述第二抬升气缸安装于所述抬升活动板上,所述第一抬升气缸驱动所述抬升活动板移动,所述第二抬升气缸驱动所述抬升推板移动。
10.作为一种优选的技术方案,所述支撑组件包括有支撑气缸和支撑板,所述支撑气缸驱动所述支撑板移动。
11.作为一种优选的技术方案,所述支撑板为直角型钢板。
12.作为一种优选的技术方案,所述升降机构包括有升降背板、升降撑板和升降直线
电机,所述升降直线电机安装于所述升降背板上,所述升降直线电机驱动所述升降撑板于两个运输机构之间移动。
13.作为一种优选的技术方案,所述储存机构包括有堆叠支架、提升组件和棘爪结构,所述棘爪结构设置于所述堆叠支架的两侧,所述提升组件安装于所述堆叠支架的下方。
14.作为一种优选的技术方案,所述提升组件包括有提升气缸和提升板,所述提升气缸驱动所述提升板移动。
15.作为一种优选的技术方案,所述棘爪结构包括有棘爪、扭簧和棘爪安装座,所述棘爪转动设置于所述棘爪安装座上,所述扭簧一端与所述棘爪抵接,另一端与所述棘爪安装座抵接。
16.作为一种优选的技术方案,所述运输机构包括有运输电机、传动连杆结构和同步带结构,所述传动连杆结构与所述同步带结构连接,所述运输电机驱动所述传动连杆结构旋转,从而带动所述同步带结构传动。
17.本发明的有益效果在于:上述tray盘上料装置,可以通过上料机构和运输机构能够实现自动上tray盘,并通过升降机构、运输机构和储存机构对空tray盘实现自动转存,结构简单、上下料效率高,各个机构之间衔接流畅。
附图说明
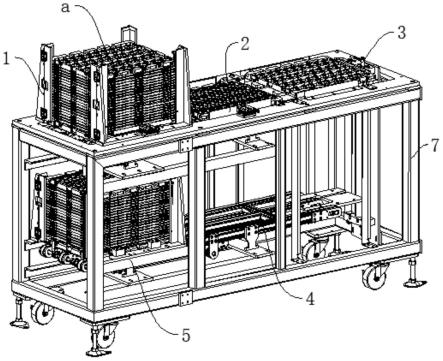
18.图1为本发明涉及的tray盘上料装置的结构示意图;
19.图2为本发明涉及的上料机构的结构示意图一;
20.图3为本发明涉及的上料机构的结构示意图二;
21.图4为本发明涉及的第一运输机构的结构示意图;
22.图5为本发明涉及的升降机构的结构示意图;
23.图6为本发明涉及的第二运输机构的结构示意图;
24.图7为本发明涉及的储存机构的结构示意图;
25.图8为本发明涉及的棘爪结构的结构示意图。
具体实施方式
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
27.如图1所示,一种tray盘上料装置,包括有机架7、上料机构1、第一运输机构2、第二运输机构4、升降机构3和储存机构5,上料机构1和第一运输机构2安装于机架7的上端,第二运输机构4和储存机构5安装于机架7靠近下端处,升降机构3活动设置于第一运输机构2和第二运输机构4之间,装有物料的tray盘a储存于上料机构1,上料机构1将装有物料的tray盘a上料至第一运输机构2,第一运输机构2将装有物料的tray盘a上料移动至指定位置,搬运机构将tray盘a上的物料搬运至后续工位,第一运输机构2将空的tray盘a移动至升降机构3,升降机构3将空的tray盘a移动至第二运输机构4,第二运输机构4将空的tray盘a运输至储存机构5,储存机构5将空的tray盘a进行堆叠存放。
28.请结合图2和图3所示,上料机构1包括有抬升组件11、支撑组件12、储料支架13和
第一到位传感器14,抬升组件11安装于储料支架13的下方,支撑组件12设置于储料支架13的两侧,第一到位传感器14用于检测tray盘a是否落入第一运输机构2上。抬升组件11包括有抬升基板111、抬升活动板114、抬升推板115、第一抬升气缸112、第二抬升气缸113、导向杆116和导套117,第一抬升气缸112安装于抬升基板111上,第二抬升气缸113安装于抬升活动板114上,导套117安装于抬升活动板114和抬升基板111上,导向杆116穿置于导套117上,且导向杆116的一端与抬升推杆115固设,第一抬升气缸112驱动抬升活动板114沿导向杆116移动,第二抬升气缸113驱动抬升推板115沿导向杆116移动。支撑组件12包括有支撑气缸121和支撑板122,支撑气缸121驱动支撑板122移动,支撑板122为直角型钢板,能够较佳地卡紧两个tray盘之间的缝隙上,并将tray盘调整好方便,避免tray盘摆放倾斜。储料支架13包括有两个储料固定支架131、两个储料活动支架132和两个储料固定底板133,储料固定支架131固设于储料固定底板133的一端,储料活动支架132固设于储料固定底板133的另一端,两个储料固定支架131和两个储料活动支架132形成储料空间,储料空间的形状与tray盘a的外表面匹配,保证tray盘a储存于储料空间时,可以保证tray盘a堆放整齐,储料固定支架131上设置有储料支架出料口1311,两个储料支架出料口1311相对设置,形成一个可供一个tray盘a通过的空间,避免多个tray盘a同时上料,储料活动支架132包括有储料档板1321、储料活动板1322、储料合页1323和储料锁固块1324,储料挡板1321固定于储料固定底板133上,储料活动板1322通过储料合页1323设置于储料挡板1321上,当需要存放存满物料的tray盘a时,可以打开储料活动板1322将tray盘a摆放至储料空间内,无需从储料支架13上方放置tray盘a,储料锁固块1324转动设置于储料挡板1321上,能够锁定储料活动板1322,防止储料活动板1322在上料的过程中打开,避免tray盘倾倒。当需要将tray盘a进行上料时,第一抬升气缸112驱动抬升活动板114沿导向杆116向上移动,第二抬升气缸113驱动抬升推板115沿导向杆116向上移动,将堆叠存放的tray盘a全部抬起,支撑气缸121驱动支撑板122收缩,随后第一抬升气缸112驱动抬升活动板114沿导向杆116向下移动,使从下往上数的第一个tray盘a与第二个tray盘a之间的空隙对齐支撑板122的水平板,支撑气缸121驱动支撑板122伸出,使支撑板122的水平板插入至从下往上数的第一个tray盘a与第二个tray盘a之间的空隙,且支撑板122的竖直板压紧第二个tray盘a的端部,支撑板122支撑倒数第二个tray盘a将倒数第一个tray盘a与其他tray盘进行分离,并可以防止堆叠存放的tray盘a倾倒,第二抬升气缸113驱动抬升推板115沿导向杆116向下移动,将分离的tray盘a放置在第二运输机构2上,第一到位传感器14感应到tray盘a,第二运输机构2驱动,带动tray盘a至指定位置。
29.如图4所示,第一运输机构2包括有第一运输电机21、第一传动连杆结构22、第一同步带结构23、导向结构24、限位组件25和第二到位传感器26,第一传动连杆结构22分别与三个第一同步带结构23连接,第一运输电机21驱动第一传动连杆结构22旋转,从而带动第一同步带结构23传动,导向结构24安装于第一同步带结构23两侧,第二到位传感器26安装于导向结构24的一端,限位组件25安装于第一同步带结构23的一端,且靠近导向结构24。导向结构24包括有导向气缸241和导向板242,导向气缸241驱动导向板242移动。限位组件25包括有限位气缸251和限位板252,限位气缸251驱动限位板252移动。第一到位传感器14感应到tray盘a,第一运输电机21驱动第一传动连杆结构22旋转,从而带动第一同步带结构23传动,直至第二到位传感器26感应到tray盘a时,限位气缸251驱动限位板252伸出,此时,tray
盘a与限位板252接触,第一运输电机21停止,导向气缸241驱动导向板242伸出,将tray盘a夹紧固定,待搬运机构将tray盘a上的物料搬运至后续工位,当tray盘a的物料全部上料完毕后,导向气缸241驱动导向板242复位,限位气缸251驱动限位板252复位,第一运输电机21重新驱动,将空tray盘a传输至升降机构3。
30.如图5所示,升降机构3包括有升降背板31、升降撑板33、升降直线电机32、第三到位传感器34、导向固定板36和导向支架35,升降背板31固设于机架7上,升降直线电机32安装于升降背板31上,升降直线电机32驱动升降撑板33于第一运输机构2和第二运输机构4之间移动,第三到位传感器34安装于升降撑板33上,且靠近升降背板31的一端,导向固定板36安装于机架7的上端,用于引导tray盘a进入至升降撑板33上,导向支架35竖直安装于机架7上,防止升降直线电机32在移动时,tray盘a脱离升降撑板33,第一运输机构2将空tray盘a移动至升降撑板33,第三到位传感器34检测到tray盘a到位后,升降直线电机32驱动升降撑板33向下移动,将空tray盘a放置在第二运输机构4上。
31.如图6所示,第二运输机构4包括有第二运输电机41、第二传动连杆结构42、第二同步带结构43、限位块44和第四到位传感器45,第二传动连杆结构42分别与三个第二同步带结构43连接,第二运输电机41驱动第二传动连杆结构44旋转,从而带动第二同步带结构43传动,第四到位传感器45安装于位于中间的第二同步带结构43的端部,且靠近储存机构5,限位块44安装于位于两侧的第二同步带结构43上,且位于第四到位传感器45的两侧,第三到位传感器34感应到tray盘a,升降直线电机32驱动升降撑板33向下移动,第二运输电机41驱动第二传动连杆结构42旋转,从而带动第二同步带结构43传动,待升降撑板33带动tray盘a放置于第二同步带结构43上,第二同步带结构43将tray盘a移动至储存机构5,待第四到位传感器45感应到tray盘a时,tray盘a与限位块44接触,第二运输电机41停止驱动。
32.请结合图7和图8所示,储存机构5包括有堆叠支架53、提升组件51和棘爪结构52,棘爪结构52设置于堆叠支架53的两侧,提升组件51安装于堆叠支架53的下方。提升组件51包括有提升基板511、提升气缸512和提升板513,提升气缸512安装于提升基板511上,提升气缸512驱动提升板513移动。棘爪结构52包括有棘爪522、扭簧523和棘爪安装座521,棘爪522转动设置于棘爪安装座521上,扭簧523一端与棘爪522抵接,另一端与棘爪安装座521抵接。堆叠支架53包括有两个堆叠固定支架531、两个堆叠活动支架532和两个堆叠固定底板533,堆叠固定支架531固设于堆叠固定底板533的一端,堆叠活动支架532固设于堆叠固定底板533的另一端,两个堆叠固定支架531和两个堆叠活动支架532形成堆叠空间,堆叠空间的形状与tray盘a的外表面匹配,保证tray盘a储存于堆叠空间时,可以保证tray盘a堆放整齐,堆叠固定支架531上设置有堆叠支架出料口5311,两个堆叠支架出料口5311相对设置,形成一个可供一个tray盘a通过的空间,堆叠活动支架532包括有堆叠档板5321、堆叠活动板5322、堆叠合页5323和堆叠锁固块5324,堆叠挡板5321固定于堆叠固定底板533上,堆叠活动板5322通过堆叠合页5323设置于堆叠挡板5321上,当需要取出所有空tray盘a时,可以打开堆叠活动板5322将tray盘a从堆叠空间中取出,无需从堆叠支架53上方取出tray盘a,堆叠锁固块5324转动设置于堆叠挡板5321上,能够锁定堆叠活动板5322,防止堆叠活动板5322在堆叠的过程中打开,避免tray盘倾倒。当第四到位传感器45感应到tray盘a时,此时tray盘a移动至堆叠空间的下方,提升气缸512驱动提升板513向上移动,使棘爪522与tray盘a接触,提升气缸512继续移动,棘爪522转动将扭簧523压缩,使tray盘a通过棘爪结构52,
并顶起原先储存于堆叠空间的tray盘a,随后棘爪522在扭簧523的作用下复位,提升气缸512驱动提升板513向下移动复位,使棘爪522支撑tray盘a的底部,以完成堆叠tray盘。
33.上述tray盘上料装置在使用前,打开储料活动板1322将装满物料的tray盘a摆放至储料空间内,随后关闭储料活动板1322并操作储料锁骨块1324,将储料活动板1322锁固。开始上料时,第一抬升气缸112驱动抬升活动板114沿导向杆116向上移动,第二抬升气缸113驱动抬升推板115沿导向杆116向上移动,将堆叠存放的tray盘a全部抬起,支撑气缸121驱动支撑板122收缩,随后第一抬升气缸112驱动抬升活动板114沿导向杆116向下移动,使从下往上数的第一个tray盘a与第二个tray盘a之间的空隙对齐支撑板122的水平板,支撑气缸121驱动支撑板122伸出,使支撑板122的水平板插入至从下往上数的第一个tray盘a与第二个tray盘a之间的空隙,且支撑板122的竖直板压紧第二个tray盘a的端部,支撑板122支撑倒数第二个tray盘a将倒数第一个tray盘a与其他tray盘进行分离,并可以防止堆叠存放的tray盘a倾倒,第二抬升气缸113驱动抬升推板115沿导向杆116向下移动,将分离的tray盘a放置在第二运输机构2上,第一到位传感器14感应到tray盘a,第一运输电机21驱动第一传动连杆结构22旋转,从而带动第一同步带结构23传动,直至第二到位传感器26感应到tray盘a时,限位气缸251驱动限位板252伸出,此时,tray盘a与限位板252接触,第一运输电机21停止,导向气缸241驱动导向板242伸出,将tray盘a夹紧固定,待搬运机构将tray盘a上的物料搬运至后续工位,当tray盘a的物料全部上料完毕后,导向气缸241驱动导向板242复位,限位气缸251驱动限位板252复位,第一运输电机21重新驱动,将空tray盘a传输至升降撑板33,第三到位传感器34检测到tray盘a到位后,升降直线电机32驱动升降撑板33向下移动,第二运输电机41驱动第二传动连杆结构42旋转,从而带动第二同步带结构43传动,待升降撑板33带动tray盘a放置于第二同步带结构43上,第二同步带结构43将tray盘a移动至储存机构5,待第四到位传感器45感应到tray盘a时,tray盘a与限位块44接触,第二运输电机41停止驱动,此时tray盘a移动至堆叠空间的下方,提升气缸512驱动提升板513向上移动,使棘爪522与tray盘a接触,提升气缸512继续移动,棘爪522转动将扭簧523压缩,使tray盘a通过棘爪结构52,并顶起原先储存于堆叠空间的tray盘a,随后棘爪522在扭簧523的作用下复位,提升气缸512驱动提升板513向下移动复位,使棘爪522支撑tray盘a的底部,以完成堆叠tray盘。
34.以上所述实施例,只是本发明的较佳实例,并非来限制本发明的实施范围,故凡依本发明申请专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本发明专利申请范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1