一种用于飞机垂直尾翼装配后下架的专用设备的制作方法
1.本发明属于航空装备技术领域,涉及一种用于飞机垂直尾翼装配后下架的专用设备,用于飞机垂直尾翼装配后由垂直尾翼总装型架转移至架下,并移交至下一站位所使用,能够在省时、省力、安全的情况下,进行垂直尾翼的下架工作。
背景技术:
2.在飞机垂直尾翼装配完成后,需要将产品由工装型架中取出至架下,进行后续装配工作。常规方式通常为手工取出和吊运下架。c919大型客机垂直尾翼盒段长度约8.7米,宽度约3米,总重量约420kg。基于该产品尺寸和重量,手工取出无法实现。若采用吊运方式,至少需要6人进行协同配合,且吊运下架过程中,产品会出现摆动的情况,对操作人员安全和产品质量造成了隐患。
技术实现要素:
3.为了解决上述问题,本发明提供了一种用于飞机垂直尾翼装配后下架的专用设备,在飞机垂直尾翼装配完成后将产品由工装型架中取出至架下,并转移至下一站位。该设备省时省力,极大降低了对产品损伤和人员安全的潜在隐患。
4.本发明的技术方案如下:
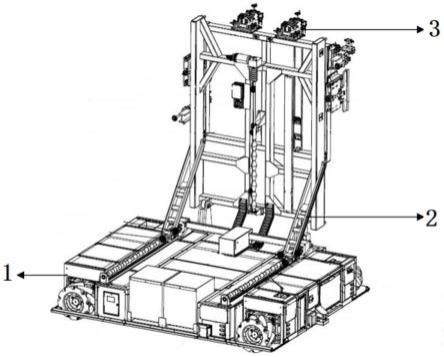
5.一种用于飞机垂直尾翼装配后下架的专用设备,包括移动机构1、翻转机构2、抓举机构3和控制系统。
6.所述移动机构1包括移动平台、四个万向轮4、脚撑、激光指示器5和指示灯6。其中,四个万向轮4分别安装在移动平台的四角处;每个万向轮4均具有一个马达和一个驱动。每个万向轮4均由若干个互为45
°
的滚筒组成,每个滚筒通过轴连接在万向轮的圆周面,并可以绕轴自动旋转。每个万向轮移动的合成使移动机构在各个方向上移动,包括3种正交运动以及1个旋转运动。
7.所述移动平台的前后两侧均安装激光指示器5,用于检测移动机构是否在正确位置;移动平台的四周均设有指示灯6,产品下架时用于指示移动机构是否处于正确位置。所述脚撑设于移动平台底部,并通过液压手动泵7驱动升降,当确认移动机构位置正确后,使用液压手动泵降下脚撑,以保证专用设备不会在下架过程中产生移动,为后续下架工作进行准备。
8.所述翻转机构2包括翻转框架8、翻转轴9、翻转连杆12、翻转驱动电机11、翻转丝杠10和翻转丝杠导轨。其中,移动平台两侧各安装一翻转丝杠导轨,两翻转丝杠10安装在翻转丝杠导轨中,且均与翻转驱动电机11连接。所述翻转框架8为框架式结构,其下端通过翻转轴9与移动机构1的移动平台连接;翻转框架8的两侧各与一翻转连杆12的一端铰接,两翻转连杆12的另一端分别与两翻转丝杠10通过螺纹配合连接。通过翻转驱动电机11驱动两翻转丝杠10转动,进而带动翻转连杆12移动,使产品在翻转框架8的带动下由垂直状态转变为水平状态,为后续站位变换进行准备。
9.所述抓举机构3负责连接垂直尾翼组件,将垂直尾翼组件从型架内取出。抓举机构3包括上升丝杠13、上升驱动电机14、连接器15、支撑器16和抓举框架19。其中,上升丝杠13垂直放置,其两端安装于翻转框架中部,并通过置于翻转框架顶端的上升驱动电机14驱动转动。翻转框架的左右两侧均设置有垂直滑轨17,抓举框架19安装在垂直滑轨17上,其中部与上升丝杠13通过螺纹配合连接,在上升驱动电机的驱动下实现升降。连接器15设置于抓举框架19顶端,其通过插销与产品起吊接头进行连接。所述连接器15设有两套滚轮和导轨机构18,可使其在水平方向以及垂直产品方向移动,以保证连接机构无应力连接。所述支撑器16安装在抓举框架19的左右两端,用于产品连接后,与产品外表面贴合,避免产品产生移动。
10.所述控制系统位于移动平台内部,用于控制移动平台实现移动、控制指示灯及激光指示器运作、控制翻转驱动电机工作实现翻转框架翻转、控制上升驱动电机工作实现抓举框架升降。
11.使用时,设备通过移动机构1精确移动至固定位置;设备到位后,抓举机构3上升至指定高度;将抓举机构3与垂直尾翼前梁上的起吊接头通过定位销进行连接;连接完成后,松开垂直尾翼用于定位的所有与装配工装的连接;移动机构1装载产品移动至安全区域,在翻转机构2作用下,将垂直尾翼组件在设备上转移至水平状态;由移动机构1将垂直尾翼转移至下一站位进行后续工作。
12.本发明的有益效果为:本发明所述设备大量地节约了人力资源,常规吊运下架需要至少6人进行协同进行操作,而本发明下架设备仅需2人即可进行操作,节约了67%的人员。此外,在吊运过程中,垂直尾翼组件会在工装型架内产生晃动,使得产品存在极大的损伤风险,同时对于操作人员的安全存在一定隐患。
附图说明
13.图1是垂直尾翼装配后下架的专用设备结构示意图。
14.图2是移动机构的结构示意图。
15.图3是翻转机构的结构示意图。
16.图4是抓举机构的结构示意图。
17.图5是连接器的局部放大图。
18.图中:1移动机构;2翻转机构;3抓举机构;4万向轮;5激光指示器;6指示灯;7液压手动泵;8翻转框架;9翻转轴;10翻转丝杠;11翻转驱动电机;12翻转连杆;13上升丝杠;14上升驱动电机;15连接器;16支撑器;17垂直导轨;18滚轮和导轨机构;19抓举框架。
具体实施方式
19.为使得本发明的发明目的、特征、优点能够更加的明显和易懂,以下参照附图并结合具体实施方式来进一步描述本发明,以令本领域技术人员参照说明书文字能够据以实施,本发明保护范围并不受限于该具体实施方式。
20.如图1所示,一种用于飞机垂直尾翼装配后下架的专用设备,包括移动机构1、翻转机构2、抓举机构3和控制系统。
21.如图2所示,移动机构1包括移动平台、四个万向轮4、脚撑、激光指示器5和指示灯
6。其中,四个万向轮4分别安装在移动平台的四角处;每个万向轮4均具有一个马达和一个驱动。每个万向轮4均由若干个互为45
°
的滚筒组成,每个滚筒通过轴连接在万向轮的圆周面,并可以绕轴自动旋转。每个万向轮移动的合成使移动机构在各个方向上移动,包括3种正交运动以及1个旋转运动。
22.所述移动平台的前后两侧均安装激光指示器5,用于检测移动机构是否在正确位置;移动平台的四周均设有指示灯6,产品下架时用于指示移动机构是否处于正确位置。所述脚撑设于移动平台底部,并通过液压手动泵7驱动升降,当确认移动机构位置正确后,使用液压手动泵降下脚撑,以保证专用设备不会在下架过程中产生移动,为后续下架工作进行准备。
23.如图3所示,翻转机构2包括翻转框架8、翻转轴9、翻转连杆12、翻转驱动电机11、翻转丝杠10和翻转丝杠导轨。其中,移动平台两侧各安装一翻转丝杠导轨,两翻转丝杠10安装在翻转丝杠导轨中,且均与翻转驱动电机11连接。所述翻转框架8为框架式结构,其下端通过翻转轴9与移动机构1的移动平台连接;翻转框架8的两侧各与一翻转连杆12的一端铰接,两翻转连杆12的另一端分别与两翻转丝杠10通过螺纹配合连接。通过翻转驱动电机11驱动两翻转丝杠10转动,进而带动翻转连杆12移动,使产品在翻转框架8的带动下由垂直状态转变为水平状态,为后续站位变换进行准备。
24.如图4所示,抓举机构3包括上升丝杠13、上升驱动电机14、连接器15、支撑器16和抓举框架19。其中,上升丝杠13垂直放置,其两端安装于翻转框架中部,并通过置于翻转框架顶端的上升驱动电机14驱动转动。翻转框架的左右两侧均设置有垂直滑轨17,抓举框架19安装在垂直滑轨17上,其中部与上升丝杠13通过螺纹配合连接,在上升驱动电机的驱动下实现升降。连接器15设置于抓举框架19顶端,其通过插销与产品起吊接头进行连接。所述连接器15设有两套滚轮和导轨机构18,可使其在水平方向以及垂直产品方向移动,以保证连接机构无应力连接。所述支撑器16安装在抓举框架19的左右两端,随抓举框架19一同升降,用于产品连接后,与产品外表面贴合,避免产品产生移动。
25.所述控制系统位于移动平台内部,用于控制移动平台实现移动、控制指示灯及激光指示器运作、控制翻转驱动电机工作实现翻转框架翻转、控制上升驱动电机工作实现抓举框架升降。
26.在进行产品下架时,操作员驱动万向轮4带动移动平台移动至下架位置,当车辆超过下架位置时,设备会自动停止。当处于正确位置时,设备会自动停止,发出警报声音,并且指示灯6会快速闪烁。此时,操作员需检查激光指示器5是否在地板标记内。当确认移动机构位置正确后,操作员使用液压手动泵7降下脚撑,以保证机构不会在下架过程中产生移动,为后续下架工作工作进行准备。
27.在移动机构1移动至指定位置时,通过控制上升驱动电机14,带动上升丝杠13,使抓举框架19沿垂直滑轨17上升,在达到指定位置时,上升停止。调整连接器15的两套滚轮导轨机构18,使用插销与产品起吊接头进行连接。手动调节支撑器16位置,使其与产品外表面完全贴合。
28.在抓举机构3与产品连接完成后,通过控制翻转驱动电机11,带动两处翻转丝杠10转动,使翻转连杆12沿翻转丝杠导轨移动。带动翻转框架8沿翻转轴9进行转动,使产品在翻转框架8的带动下由垂直状态转变为水平状态。操作员驱动万向轮4使移动平台移动至下一
站位。
29.本发明在垂尾10002架,10106架,10107架,10108架中已经应用;同时,本发明方法适用范围很广,可适应在类似结构事例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1