用于监控起重机吊臂姿态的方法及系统与流程
本技术涉及起重机控制,具体地涉及一种用于监控起重机吊臂姿态的方法及系统。
背景技术:
1、在工程机械行业领域,由于很多机械设备结构复杂且作业空间大,且通常需要远距离输运物料,因而对操作精度有较高的要求。需要应用工程起重机的施工场景包括风力发电设备吊装、核电施工、高架桥梁、地铁隧道和高楼建设施工等高台吊装场景。在这些施工场景中,吊物重量通常较大,吊物通常需要快速,精准的放置到规定的位置,不能发生丝毫的偏移,同时还要避免发生扛杆等有可能造成设备损坏进而引发安全生产事故的现象。这对工程起重机的施工操作有很高的要求。
2、现有技术通过设置数量较多的传感器,精确测量绞轴距离、绞轴高度、臂长、角度、吊物的尺寸及坐标信息、障碍物的坐标信息,从而计算出吊臂主臂仰角、升起高度、工作幅度及跨障碍距离,随后根据计算结果制定相应的吊装规划。并根据吊装规划,在多个工作人员的配合之下将吊物缓慢吊装至合适的位置。此外,由于视野盲区,在很多吊装作业过程中,操作工不能清楚地看到吊物的位置,不能很准确地规避一些不合理的吊装操作,容易造成安全生产事故。因此,现有技术存在施工效率低、安全风险高和成本较高的问题。
技术实现思路
1、本技术实施例的目的是提供一种用于监控起重机吊臂姿态的方法及系统,用以解决现有技术中施工效率低、安全风险高和成本较高的问题。
2、为了实现上述目的,本技术第一方面提供一种用于监控起重机吊臂姿态的方法,应用于服务器,服务器分别与设备管理终端和至少一台起重机通信,该方法包括:
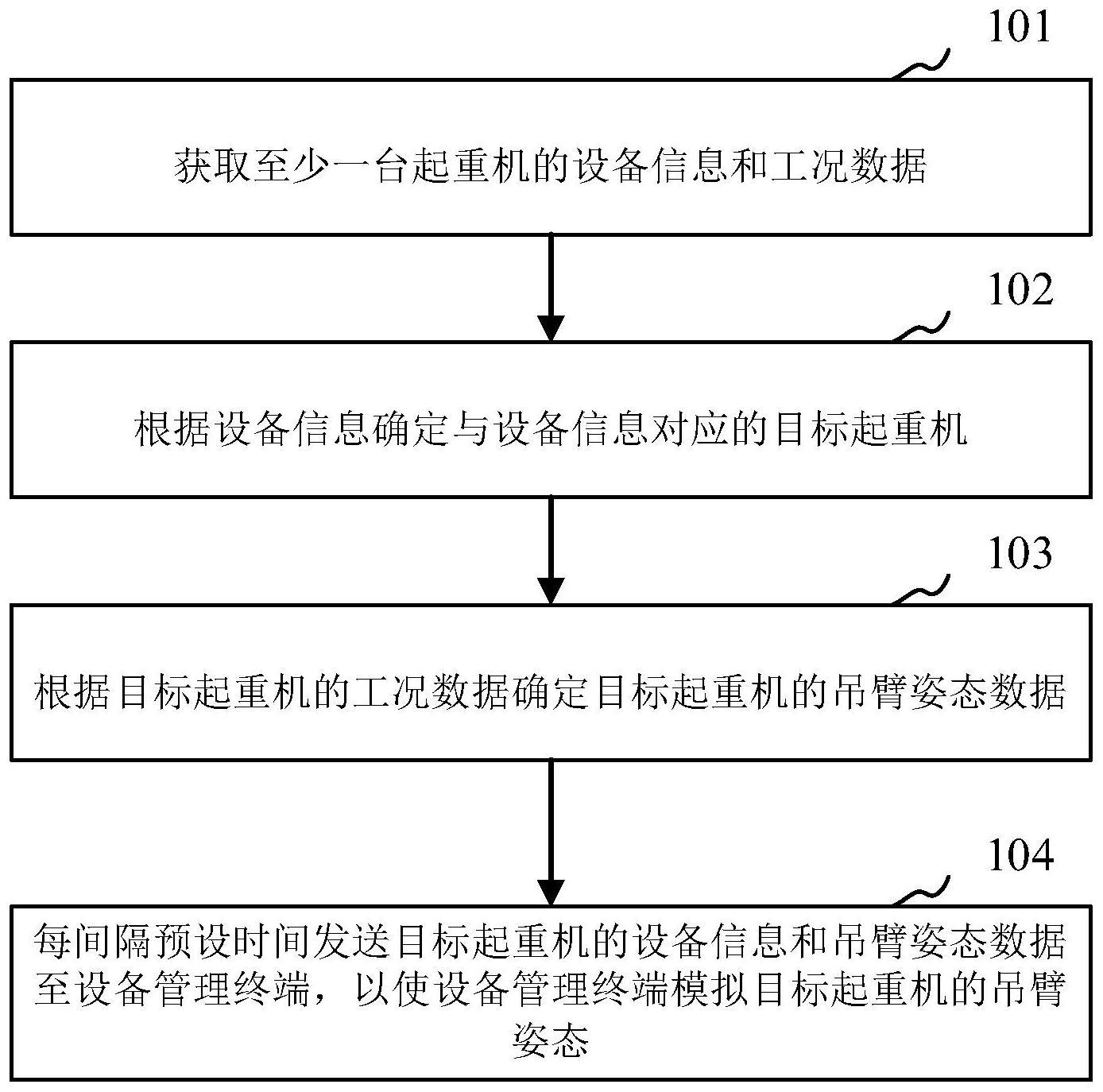
3、获取至少一台起重机的设备信息和工况数据;
4、根据设备信息确定与设备信息对应的目标起重机;
5、根据目标起重机的工况数据确定目标起重机的吊臂姿态数据;
6、每间隔预设时间发送目标起重机的设备信息和吊臂姿态数据至设备管理终端,以使设备管理终端模拟目标起重机的吊臂姿态。
7、在本技术实施例中,根据目标起重机的工况数据确定目标起重机的吊臂姿态数据包括:
8、判断目标起重机是否设置有副臂;
9、在目标起重机不设置有副臂的情况下,根据目标起重机的工况数据确定目标起重机的第一主臂长度、第一主臂仰角和第一起升高度。
10、在本技术实施例中,第一主臂长度满足公式(1):
11、
12、第一主臂仰角满足公式(2):
13、
14、第一起升高度满足公式(3):
15、
16、其中,b1为第一主臂长度,d为吊臂尾部距吊车中心的距离,e为吊车中心距建筑物底部边缘的距离,c为吊装点距建筑物顶部边缘的距离,f为建筑物的高度,a为吊臂尾部距地面的距离,α1为第一主臂仰角,h1为第一起升高度。
17、在本技术实施例中,根据目标起重机的工况数据确定目标起重机的吊臂姿态数据包括:
18、判断目标起重机是否设置有副臂;
19、在目标起重机设置有副臂的情况下,目标起重机的工况数据确定目标起重机的第二主臂长度、第二主臂仰角、副臂长度和第二起升高度。
20、在本技术实施例中,第二主臂长度满足公式(4):
21、
22、第二主臂仰角满足公式(5):
23、
24、副臂长度满足公式(6):
25、
26、第二起升高度满足公式(7):
27、
28、其中,b2为第二主臂长度,n为吊臂尾部距建筑物顶部边缘的距离,i为扛杆高度,d为吊臂尾部距吊车中心的距离,e为吊车中心距建筑物底部边缘的距离,c为吊装点距建筑物顶部边缘的距离,f为建筑物的高度,a为吊臂尾部距地面的距离,g为副臂长度,α为副臂向下调节的角度,γ为第二主臂仰角,h2为第二起升高度。
29、在本技术实施例中,发送目标起重机的设备信息和吊臂姿态数据至设备管理终端包括:
30、通过第五代移动通信技术发送目标起重机的设备信息和吊臂姿态数据。
31、在本技术实施例中,该方法还包括:
32、接收设备管理终端发送的紧急制动指令,并通过下行指令控制通道将紧急制动指令转发至目标起重机。
33、在本技术实施例中,工况数据包括扛杆高度,该方法还包括:
34、通过复杂事件处理技术分析目标起重机的扛杆高度,以得到目标分析结果;
35、在目标分析结果符合第一预设条件的情况下,发送第一报警信号至设备管理终端;
36、在目标分析结果符合第二预设条件的情况下,发送第二报警信号至设备管理终端。
37、本技术第二方面提供一种用于监控起重机吊臂姿态的方法,应用于设备管理终端,设备管理终端与服务器通信,服务器与至少一台起重机通信,该方法包括:
38、每间隔预设时间获取目标起重机的设备信息和吊臂姿态数据;
39、根据目标起重机的设备信息和吊臂姿态数据模拟目标起重机的吊臂姿态;
40、其中,目标起重机的吊臂姿态数据是根据目标起重机的工况数据确定的,目标起重机是根据设备信息确定的,设备信息和工况数据是通过服务器获取的。
41、在本技术实施例中,设备管理终端还与操作人员终端通信,该方法还包括:
42、接收服务器发送的第一报警信号或第二报警信号;
43、在接收到第一报警信号的情况下,发送目标起重机的设备信息和第一报警信号至操作人员终端;
44、在接收到第二报警信号的情况下,调用服务器的下行指令控制通道,以发送紧急制动指令至目标起重机。
45、本技术第三方面提供一种服务器,包括:
46、存储器,被配置成存储指令;以及
47、处理器,被配置成从存储器调用指令以及在执行指令时能够实现上述的用于监控起重机吊臂姿态的方法。
48、本技术第四方面提供一种设备管理终端,包括:
49、存储器,被配置成存储指令;以及
50、处理器,被配置成从存储器调用指令以及在执行指令时能够实现上述的用于监控起重机吊臂姿态的方法。
51、本技术第五方面提供一种用于监控起重机吊臂姿态的系统,包括:
52、起重机,被配置成发送设备信息和工况数据至服务器;
53、上述的服务器,与起重机通信;
54、上述的设备管理终端,与服务器通信。
55、在本技术实施例中,该系统还包括:
56、操作人员终端,与设备管理终端通信,被配置成接收并显示目标起重机的设备信息和第一报警信号。
57、通过上述技术方案,首先获取至少一台起重机的设备信息和工况数据,并根据设备信息确定与设备信息对应的目标起重机,根据目标起重机的工况数据确定目标起重机的吊臂姿态数据。然后每间隔预设时间发送目标起重机的设备信息和吊臂姿态数据至设备管理终端,以使设备管理终端模拟目标起重机的吊臂姿态。本技术根据目标起重机的工况数据确定目标起重机的吊臂姿态数据,并每间隔预设时间发送目标起重机的设备信息和吊臂姿态数据至设备管理终端,以通过设备管理终端模拟目标起重机的吊臂姿态,能够监控施工过程中的起重机吊臂姿态,提高施工效率,减少安全风险。
58、本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!