卸船机抓斗控制方法、装置、卸船机及存储介质与流程
本申请属于卸船设备,具体涉及一种卸船机抓斗控制方法、装置、卸船机及存储介质。
背景技术:
1、随着经济的发展,特大型干散货轮船运输成为发展趋势,而机械化的卸船机便应运而生。具体而言,卸船机是港口上用来将船舱中的货物抓取到陆地上的机器,如图1所示,为现有技术中的卸船机简化示意图,其主要包括桁架机构、抓斗、小车机构、卸料斗、控制系统及驾驶室等,桁架机构用于支撑和固定其它部件,抓斗用于自货船上抓取物料,并在控制系统的控制下移动至料斗上方,将物料自卸料斗进行卸料。
2、现有技术中,当抓斗从船上抓取物料之后,需要操作人员控制小车机构,并带动抓斗运动至卸料斗上方,以进行卸料操作。如此,需要操作人员代重复性控制抓斗移动至料斗上方,不仅增加了操作人员的工作量和劳动强度,还可能引因操作人员疲劳而造成的安全隐患。
技术实现思路
1、本申请提出一种卸船机抓斗控制方法、装置、卸船机及存储介质,能够快速、准确地实现卸船机的一键复位功能。
2、本申请第一方面实施例提出了一种卸船机抓斗控制方法,所述方法包括:
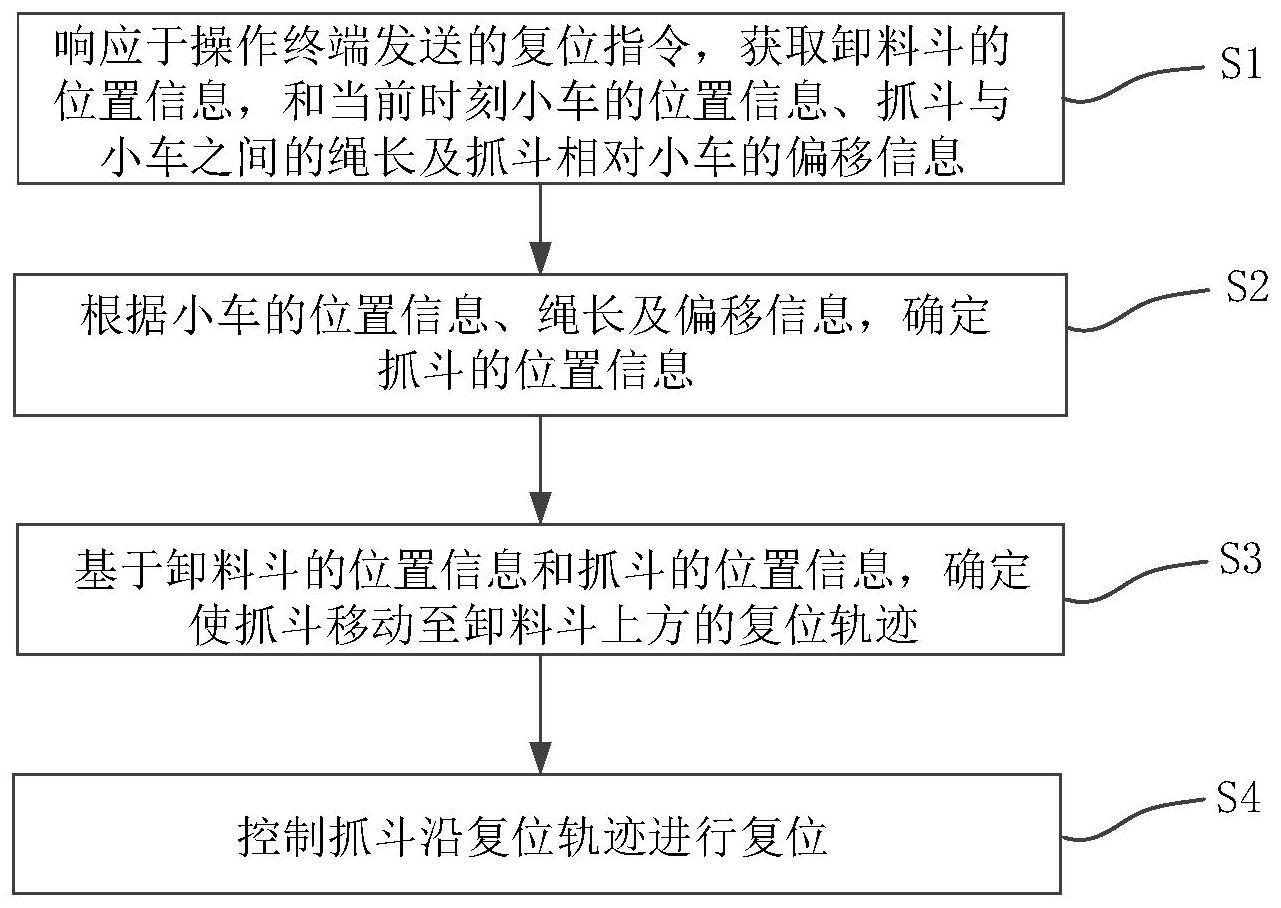
3、响应于操作终端发送的复位指令,获取卸料斗的位置信息,和当前时刻小车的位置信息、抓斗与所述小车之间的绳长及所述抓斗相对所述小车的偏移信息;
4、根据所述小车的位置信息、所述绳长及所述偏移信息,确定所述抓斗的位置信息;
5、基于所述卸料斗的位置信息和所述抓斗的位置信息,确定使所述抓斗移动至所述卸料斗上方的复位轨迹;
6、控制所述抓斗沿所述复位轨迹进行复位。
7、在本申请一些实施例中,所述获取所述抓斗相对所述小车的偏移信息,包括:
8、获取小车下面正投影方向的目标图像,所述目标图像包含完整的抓斗图像;
9、基于所述目标图像,通过训练好的目标检测模型检测所述抓斗中心相对所述目标图像中心的图像偏移量;
10、基于所述图像偏移量确定所述抓斗相对所述小车的偏移信息。
11、在本申请一些实施例中,所述基于所述图像偏移量确定所述抓斗相对所述小车的偏移信息,包括:
12、获取所述目标图像的采集设备的成像参数和所述绳长;
13、基于所述成像参数、所述绳长及所述图像偏移量,确定所述抓斗相对所述小车的实际偏移量。
14、在本申请一些实施例中,所述基于所述成像参数、所述绳长及所述图像偏移量,确定所述抓斗相对所述小车的实际偏移量,包括:
15、根据所述成像参数,确定所述采集设备的焦距,以及所述目标图像在目标方向上的缩放系数,所述目标方向垂直于小车运动方向;
16、基于所述焦距、所述缩放系数及所述图像偏移量,根据下面公式计算所述抓斗相对所述小车的实际偏移量:
17、
18、其中,δu为所述图像偏移量;所述δx为实际偏移量;所述α为所述目标图像在目标方向上的缩放系数;所述f为所述采集设备的焦距。
19、在本申请一些实施例中,所述通过训练好的目标检测模型检测所述抓斗中心相对所述目标图像中心的图像偏移量之前,还包括:
20、获取训练数据集,所述训练数据集包括多个所述目标图像;
21、采用部分目标图像对初始检测模型进行周期性训练,直至训练后的检测模型对目标图像进行检测,能够获得与标注信息相同的检测结果。
22、在本申请一些实施例中,所述获取小车下面正投影方向的目标图像,包括:
23、通过设置于所述小车正下方的图像采集设备,获取小车下面正投影方向的目标图像。
24、在本申请一些实施例中,所述图像采集设备采用基于针孔相机模型的成像系统。
25、本申请第二方面的实施例提供了一种卸船机抓斗控制装置,所述装置包括:
26、信息获取模块,用于响应于操作终端发送的复位指令,获取卸料斗的位置信息,和当前时刻小车的位置信息、抓斗与所述小车之间的绳长及所述抓斗相对所述小车的偏移信息;
27、位置确定模块,用于根据所述小车的位置信息、所述绳长及所述偏移信息,确定所述抓斗的位置信息;
28、轨迹确定模块,用于基于所述卸料斗的位置信息和所述抓斗的位置信息,确定使所述抓斗移动至所述卸料斗上方的复位轨迹;
29、复位控制模块,用于控制所述抓斗沿所述复位轨迹进行复位。
30、本申请第三方面的实施例提供了一种工控机,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序以实现如第一方面所述的方法。
31、本申请第四方面的实施例提供了一种卸船机,包括桁架、小车及抓斗,还包括如第三方面所述的工控机,所述工控机用于控制卸船机抓斗进行一键复位操作。
32、在本申请一些实施例中,卸船机还包括图像采集设备,所述图像采集设备设置于所述小车的正下方,用于获取小车下面正投影方向的目标图像,所述目标图像包含完整的抓斗图像。
33、本申请第五方面的实施例提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行实现如第一方面中任一项所述的方法。
34、本申请实施例中提供的技术方案,至少具有如下技术效果或优点:
35、本申请实施例提供的卸船机抓斗控制方法,在获取小车的位置信息、绳长及偏移信息之后,先根据小车的位置信息、绳长及偏移信息,确定抓斗的位置信息,之后便可基于卸料斗的位置信息和抓斗的位置信息,确定出能使抓斗准确移动至卸料斗上方的复位轨迹,然后只需控制抓斗按照该复位轨迹运行,便可实现抓斗的一键复位功能。且通过该方法获取的抓斗位置信息,充分考虑了抓斗的偏移量,是的该复位轨迹更加准确,从而可以提高自动复位的准确性和可实施性。通过自动化作业流程来取代重复性高的人工流程,不仅可以提高作业效率,还可以降低因司机疲劳而引起的安全隐患。
技术特征:
1.一种卸船机抓斗控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述抓斗相对所述小车的偏移信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述图像偏移量确定所述抓斗相对所述小车的偏移信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述成像参数、所述绳长及所述图像偏移量,确定所述抓斗相对所述小车的实际偏移量,包括:
5.根据权利要求2所述的方法,其特征在于,所述通过训练好的目标检测模型检测所述抓斗中心相对所述目标图像中心的图像偏移量之前,还包括:
6.根据权利要求2所述的方法,其特征在于,所述获取小车下面正投影方向的目标图像,包括:
7.根据权利要求5所述的方法,其特征在于,所述图像采集设备采用基于针孔相机模型的成像系统。
8.一种卸船机抓斗控制装置,其特征在于,所述装置包括:
9.一种工控机,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序以实现如权利要求1-7任一项所述的方法。
10.一种卸船机,包括桁架、小车及抓斗,其特征在于,还包括如权利要求9所述的工控机,所述工控机用于控制卸船机抓斗进行一键复位操作。
11.根据权利要求10所述的卸船机,其特征在于,还包括图像采集设备,所述图像采集设备设置于所述小车的正下方,用于获取小车下面正投影方向的目标图像,所述目标图像包含完整的抓斗图像。
12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行实现如权利要求1-7中任一项所述的方法。
技术总结
本申请提出一种卸船机抓斗控制方法、装置、卸船机及存储介质,该方法包括:响应于操作终端发送的复位指令,获取卸料斗的位置信息,和当前时刻小车的位置信息、抓斗与小车之间的绳长及抓斗相对小车的偏移信息;根据小车的位置信息、绳长及偏移信息,确定抓斗的位置信息;基于卸料斗的位置信息和抓斗的位置信息,确定使抓斗移动至卸料斗上方的复位轨迹;控制抓斗沿复位轨迹进行复位。本申请能够快速、准确地实现卸船机的一键复位功能。
技术研发人员:李子实,隋少龙,张越
受保护的技术使用者:北京拓疆者智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!