一种双摇臂抱杆受力结构安全性监测系统及监测方法与流程
1.本发明属于输电线路铁塔组立施工领域,特别涉及一种双摇臂抱杆受力结构安全性监测系统及监测方法。
背景技术:
2.目前,随着气候问题日益突出,清洁能源的需求量与日俱增,电力作为最大的清洁能源受到广泛青睐,抱杆是特高压电力传输的重要载具,其结构安全性理应得到足够重视。双摇臂抱杆具有良好的工作特性,由于施工过程中不可能做到两侧动作完全协调一致,所以其危险工况是双侧摇臂不平衡受力,因此,设计双摇臂抱杆时,允许不平衡力矩为抱杆所受最大力矩的25%-30%,现有双摇臂抱杆的生产厂家较多,但对其受力结构安全性监控属于空白,难以保证不平衡力矩在允许范围内,导致双摇臂抱杆的工作危险性较高。
3.公开号cn 216714032 u涉及一种双摇臂电力抱杆的力矩计算和防超力矩系统,该系统是在设定双摇臂电力抱杆的起重力矩应不超过额定力矩的90%情况下,通过操作人员进行确认,没有考虑摇臂自身刚度及外界因素,无法通过力矩单一指标保证监测的准确性,进而保证受力结构的安全性。
4.公开号cn 114427318 a涉及一种电力抱杆及其力矩差自动调节方法,该方法主要是通过电力抱杆的力矩差调节,以确保电力抱杆两个平衡臂的力矩差不超过最大力矩差额定值,进而防止危险发生。
技术实现要素:
5.本发明为克服现有技术的不足,提供一种双摇臂抱杆受力结构安全性监测系统及监测方法,该系统及方法利用应变式传感器和拉力传感器,计算两侧摇臂的力矩差、记录回转支撑应变,达到缩小监测设备体积、实时便捷监控抱杆受力结构安全性的目的。
6.一种双摇臂抱杆受力结构安全性监测系统包含第一角度传感器、第二角度传感器、第一应变式传感器、第二应变式传感器和拉力传感器;
7.在抱杆的左侧摇臂和抱杆右侧摇臂的外端部分别安装第二角度传感器和第一角度传感器,分别用于监测左侧摇臂和右侧摇臂在左侧拉绳和右侧拉绳起升变幅作用下的俯仰角度,在抱杆的回转支撑杆上同平面对称布置有第一应变传感器和第二应变式传感器,用以测量回转支撑杆两侧的应力值,在抱杆的左侧摇臂和右侧摇臂的端部分别通过牵引钢丝绳牵引右侧起重吊钩和左侧起重吊钩,所述右侧起重吊钩和左侧起重吊钩上分别安装一个拉力传感器,所述拉力传感器通过起吊钢丝绳起吊铁塔组件。
8.一种双摇臂抱杆受力结构安全性监测系统的监测方法包含:
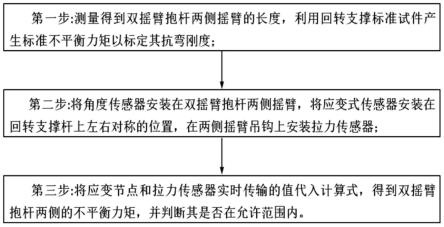
9.第一步:测量得到双摇臂抱杆两侧摇臂的长度,利用回转支撑标准试件产生标准不平衡力矩,标定所述回转支撑杆的抗弯刚度;
10.第二步:将第一角度传感器和第二角度传感器安装在抱杆两侧的摇臂上,将第一应变式传感器和第二应变式传感器安装在回转支撑两侧的对称位置,在左侧摇臂和右侧摇
臂的起重吊钩上分别安装拉力传感器;
11.第三步:将角度传感器、应变式传感器和拉力传感器实时传输的检测值代入计算公式,得到双摇臂抱杆两侧的不平衡力矩,并判断其是否在允许范围内
12.本发明相比现有技术的有益效果是:
13.本发明可根据角度传感器、应变节点的应变传感器和拉力传感器实时传输的数据,方便快捷高效率完成双摇臂抱杆受力结构的安全性监测、具有适用范围广、适应能力强、作业效率高、使用可靠的特点。
14.本发明方法利用应变式传感器和拉力传感器,计算两侧摇臂的力矩差、记录回转支撑应变,达到缩小监测设备体积、实时便捷监控抱杆受力结构安全性的目的。
15.下面结合附图和实施例对本发明的技术方案作进一步地说明:
附图说明
16.图1是双摇臂抱杆受力结构安全性监测系统及总体结构受力示意图;
17.图2是双摇臂抱杆两侧摇臂起重示意图;
18.图3是双摇臂抱杆受力结构安全性监测方法流程图;
19.图4是本发明的监测原理示意图。
20.其中:1、右侧起重吊钩,2、第一角度传感器,3、右侧摇臂,4、右侧拉绳,6、左侧起重吊钩,7、第二角度传感器,8、左侧摇臂,9、左侧拉绳,10、回转支撑,11、第一应变式传感器,12、第二应变式传感器,13、牵引钢丝绳,14、拉力传感器,15、起吊钢丝绳、16、铁塔组件。
具体实施方式
21.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
22.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
23.结合图1和图3所示,一种双摇臂抱杆受力结构安全性监测系统包含第一角度传感器2、第二角度传感器7、第一应变式传感器11、第二应变式传感器12和拉力传感器14;
24.在抱杆的左侧摇臂8和右侧摇臂3的外端部分别安装第二角度传感器7和第一角度传感器2,分别用于监测左侧摇臂8和右侧摇臂3在左侧拉绳9和右侧拉绳4起升变幅作用下的俯仰角度,在抱杆的回转支撑10上同平面对称布置有第一应变传感器11和第二应变式传感器12,用以测量回转支撑10两侧的应力值,在抱杆的左侧摇臂8和右侧摇臂3的端部分别通过牵引钢丝绳13牵引右侧起重吊钩1和左侧起重吊钩6,所述右侧起重吊钩1和左侧起重吊钩6上分别安装一个拉力传感器14,所述拉力传感器14通过起吊钢丝绳15起吊铁塔组件16。
25.上述角度传感器、应变式传感器和拉力传感器均与中央控制器通讯连接,实现监测数据的传输。应变式传感器发出信号给中央控制器,中央控制器内的报警器报警。所述应变式传感器用于应力检测。
26.基于上述实施方案,还提供一种双摇臂抱杆受力结构安全性监测系统的监测方
法,所述方法包含:
27.第一步:测量得到双摇臂抱杆两侧摇臂的长度,利用回转支撑标准试件产生标准不平衡力矩,标定所述回转支撑10的抗弯刚度;
28.第二步:将第一角度传感器2和第二角度传感器7安装在抱杆两侧的摇臂上,将第一应变式传感器11和第二应变式传感器12安装在回转支撑两侧的对称位置,在左侧摇臂8和右侧摇臂3的起重吊钩上分别安装拉力传感器14;
29.第三步:将角度传感器、应变式传感器和拉力传感器14实时传输的检测值代入计算公式,得到双摇臂抱杆两侧的不平衡力矩,并判断其是否在允许范围内。
30.下面以实施例说明双摇臂抱杆受力结构安全性监测,
31.第一步:测量得到双摇臂抱杆左侧摇臂8和右侧摇臂3的长度分别为l1和l2,利用回转支撑标准试件产生标准不平衡力矩,标定所述回转支撑10的抗弯刚度;
32.第二步:在测得双摇臂抱杆两侧摇臂长度分别为l1和l2的基础上,在所述抱杆两侧摇臂上分别安装一个第一角度传感器2和第二角度传感器7,用于监测摇臂的俯仰角度α1,α2,在所述抱杆两侧摇臂的起重吊钩上分别安装一个拉力传感器14,分别用于监测摇臂两端的起重力g1和g2,
33.根据两侧的拉力传感器14分别测得左侧摇臂8和右侧摇臂3的起重力为g1和g2,利用公式(1):δm1=g1l1cosα
1-g2l2cosα2得出左侧摇臂8和右侧摇臂3的力矩差δm1;其中,α1为左侧摇臂8在左侧拉绳9起升变幅作用下的俯仰角度,α2为右侧摇臂3在右侧拉绳4起升变幅作用下的俯仰角度,l1为左侧摇臂8的长度,l2为右侧摇臂3的长度;
34.利用第一应变式传感器和第二应变式传感器测得回转支撑杆10左右两侧的应力值分别为σ1、σ2,所述回转支撑10左右两侧的应力差δσ,由计算式δσ=|σ
1-σ2|=δm2/w得出,其中,w为第一步获得的回转支撑杆(10)的抗弯刚度;
35.第三步:由公式δσ=|σ
1-σ2|=δm2/w变形得到公式(2):δm2=w
·
δσ,
36.由公式(1)和公式(2)得到双摇臂抱杆两侧摇臂的不平衡力矩差:δm=(δm1+δm2)/2,判断力矩差δm是否在规定的允许范围内,以确保系统的安全性,同时如果|(δm
1-δm)/δm|或者|(δm
2-δm)/δm|超过10%,则报警,提示δm1或者δm2监测出错,以此判断传感器工作异常,保证监测的正确性。两种监测互相验证,保证监测值的正确性,进而实时掌握所述双摇臂抱杆受力结构的安全性。
37.起吊作业时根据应变节点和拉力传感器实时传输的数据,通过边缘计算判断双摇臂抱杆两侧的不平衡力矩是否在规定的允许范围内
38.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1