用于作业平台的控制方法、处理器、控制装置及作业平台与流程
本发明涉及工程机械,具体地涉及一种用于作业平台的控制方法、处理器、控制装置及作业平台。
背景技术:
1、以高空作业车进行示例说明,高空作业车是指运送工作人员和使用器材到现场并进行空中作业的专用车辆。高空作业车一般包括主臂、转台、飞臂和作业平台等结构。工作人员可以站或蹲在作业平台上进行高空墙面粉刷、玻璃幕墙安装和窗户洗刷等工作。工作平台与作业平面的距离以及平行度是影响作业效率的关键因素,以作业平面为墙面进行示例说明,工作人员对高处的墙壁进行作业时,作业平台的空间位置需要不断的变化,作业平面(例如墙面或玻璃外表面等)的结构也多种多样。目前由工作人员根据现场的工况,不断进行主臂伸缩、主臂变幅、转台回转和飞臂变幅等操作来将工作平台调整至相对于作业平面的最佳作业位置。受到工作人员的熟练程度以及视觉判断偏差的影响,需要反复调整工作平台的空间位置和角度才能达到最佳作业位置,严重地,工作平台的空间位置和角度的调整时间可能占作业时间的1/4之上,导致工作人员的作业效率较低。
技术实现思路
1、为了克服现有技术存在的不足,本发明实施例提供了一种用于作业平台的控制方法、处理器、控制装置及作业平台。
2、为了实现上述目的,本发明第一方面提供一种用于作业平台的控制方法,作业平台与作业对象相对的外平面设置传感器,传感器用于在作业对象的作业平面上形成水平光线以及竖直光线;控制方法包括:
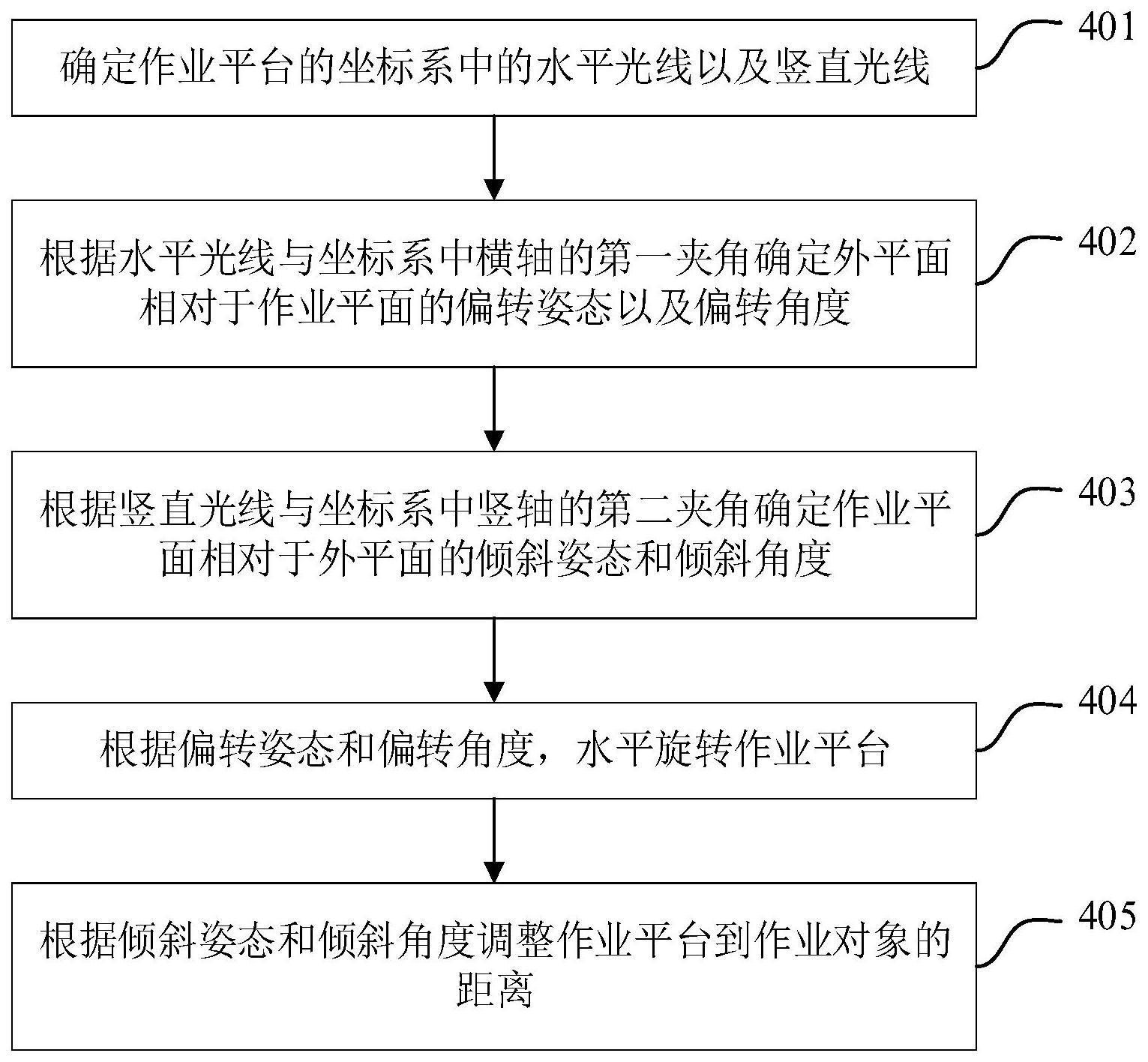
3、确定作业平台的坐标系中的水平光线以及竖直光线;
4、根据水平光线与坐标系中横轴的第一夹角确定外平面相对于作业平面的偏转姿态以及偏转角度;
5、根据竖直光线与坐标系中竖轴的第二夹角确定作业平面相对于外平面的倾斜姿态和倾斜角度;
6、根据偏转姿态和偏转角度,水平旋转作业平台;
7、根据倾斜姿态和倾斜角度调整作业平台到作业对象的距离。
8、在本发明实施例中,偏转姿态包括右后偏转;根据水平光线与坐标系中横轴的第一夹角确定外平面相对于作业平面的偏转姿态以及偏转角度包括:
9、在水平光线与坐标系中横轴的第一夹角小于90度的情况下,确定外平面相对于作业平面的偏转姿态为右后偏转,且右后偏转的偏转角度为第一夹角;
10、根据偏转姿态和偏转角度,水平旋转作业平台包括:
11、在偏转姿态为右后偏转的情况下,将作业平台沿逆时针方向水平旋转第一夹角。
12、在本发明实施例中,偏转姿态包括左后偏转;根据水平光线与坐标系中横轴的第一夹角确定外平面相对于作业平面的偏转姿态以及偏转角度包括:
13、在水平光线与坐标系中横轴的第一夹角大于90度的情况下,确定外平面相对于作业平面的偏转姿态为左后偏转,且左后偏转的偏转角度为180度与第一夹角的第一差值角度;
14、根据偏转姿态和偏转角度,水平旋转所述作业平台包括:
15、在偏转姿态为左后偏转的情况下,将作业平台沿顺时针方向水平旋转第一差值角度。
16、在本发明实施例中,倾斜姿态包括前倾;根据竖直光线与坐标系中竖轴的第二夹角确定作业平面相对于外平面的倾斜姿态和倾斜角度包括:
17、在竖直光线与坐标系中竖轴的第二夹角大于90度的情况下,确定作业平面相对于外平面的倾斜姿态为前倾,且前倾的倾斜角度为180度与第二夹角的差值角度。
18、在本发明实施例中,倾斜姿态包括后仰;根据竖直光线与坐标系中竖轴的第二夹角确定作业平面相对于外平面的倾斜姿态和倾斜角度包括:
19、在竖直光线与坐标系中竖轴的第二夹角小于90度的情况下,确定作业平面相对于外平面的倾斜姿态为后仰,且后仰的倾斜角度为第二夹角。
20、在本发明实施例中,根据倾斜姿态和倾斜角度调整作业平台到作业对象的距离包括:
21、根据倾斜姿态和倾斜角度确定竖直光线在坐标系中纵轴-竖轴平面的曲线方程;
22、确定外平面上作业点的作业高度;
23、根据作业高度以及曲线方程确定作业点与作业平面的第一水平距离;
24、在第一水平距离小于预设标准距离的情况下,确定预设标准距离与第一水平距离的第一差值,并将作业平台往远离作业对象的方向移动第一差值。
25、在本发明实施例中,控制方法还包括:
26、在第一水平距离大于预设标准距离的情况下,确定第一水平距离与预设标准距离的第二差值;
27、在倾斜姿态为后仰的情况下,确定外平面的底边的第一高度坐标;
28、根据第一高度坐标以及曲线方程确定底边与作业平面的第二水平距离;
29、在第二差值小于或等于第二水平距离的情况下,将作业平台往作业对象的方向移动第二差值;
30、在第二差值大于第二水平距离的情况下,将作业平台往作业对象的方向移动第二水平距离。
31、在本发明实施例中,在第一水平距离大于预设标准距离的情况下,确定第一水平距离与预设标准距离的第二差值之后,控制方法还包括:
32、在倾斜姿态为前倾的情况下,确定外平面的顶边的第二高度坐标;
33、根据第二高度坐标以及曲线方程确定顶边与作业平面的第三水平距离;
34、在第二差值小于或等于第三水平距离的情况下,将作业平台往作业对象的方向移动第二差值;
35、在第二差值大于第三水平距离的情况下,将作业平台往作业对象的方向移动第三水平距离。
36、本发明第二方面提供一种处理器,被配置成执行上述的用于作业平台的控制方法。
37、本发明第三方面提供一种用于作业平台的控制装置,包括:
38、传感器,设置于作业平台中与作业对象相对的外平面,传感器用于在作业对象的作业平面上形成水平光线以及竖直光线;以及
39、上述的处理器。
40、在本发明实施例中,传感器至少包括至少四个子传感器,至少四个子传感器中第一子传感器与第二子传感器在作业平台的坐标系的纵轴坐标和竖轴坐标均相等,且用于形成水平光线;至少四个子传感器中第三子传感器与第四子传感器在坐标系的横轴坐标和纵轴坐标均相等,且用于形成竖直光线。
41、本发明第四方面提供一种作业平台,包括上述的控制装置。
42、本发明第五方面提供一种高空作业车,包括上述的作业平台。
43、本发明实施例中,作业平台与作业对象相对的外平面设置传感器,传感器用于在作业对象的作业平面上形成水平光线以及竖直光线;控制方法包括:确定作业平台的坐标系中的水平光线以及竖直光线;根据水平光线与坐标系中横轴的第一夹角确定外平面相对于作业平面的偏转姿态以及偏转角度;根据竖直光线与坐标系中竖轴的第二夹角确定作业平面相对于外平面的倾斜姿态和倾斜角度;根据偏转姿态和偏转角度,水平旋转作业平台;根据倾斜姿态和倾斜角度调整作业平台到作业对象的距离。
44、这样,基于传感器的融合信息可以实时检测作业平面(例如墙面)以及作业平台的姿态信息,然后基于不同的姿态信息进行不同的动态调节,自动调整作业平台与作业平面(例如墙面)的距离和平行度,实现作业平台跟随墙壁而精准作业,将工作人员从繁琐的微动位置调整中解放出来,提高工作人员的作业效率,实现外墙作业的高效性;另外,一键智能墙面跟随方法安全且节省成本。
- 还没有人留言评论。精彩留言会获得点赞!